توضیحات
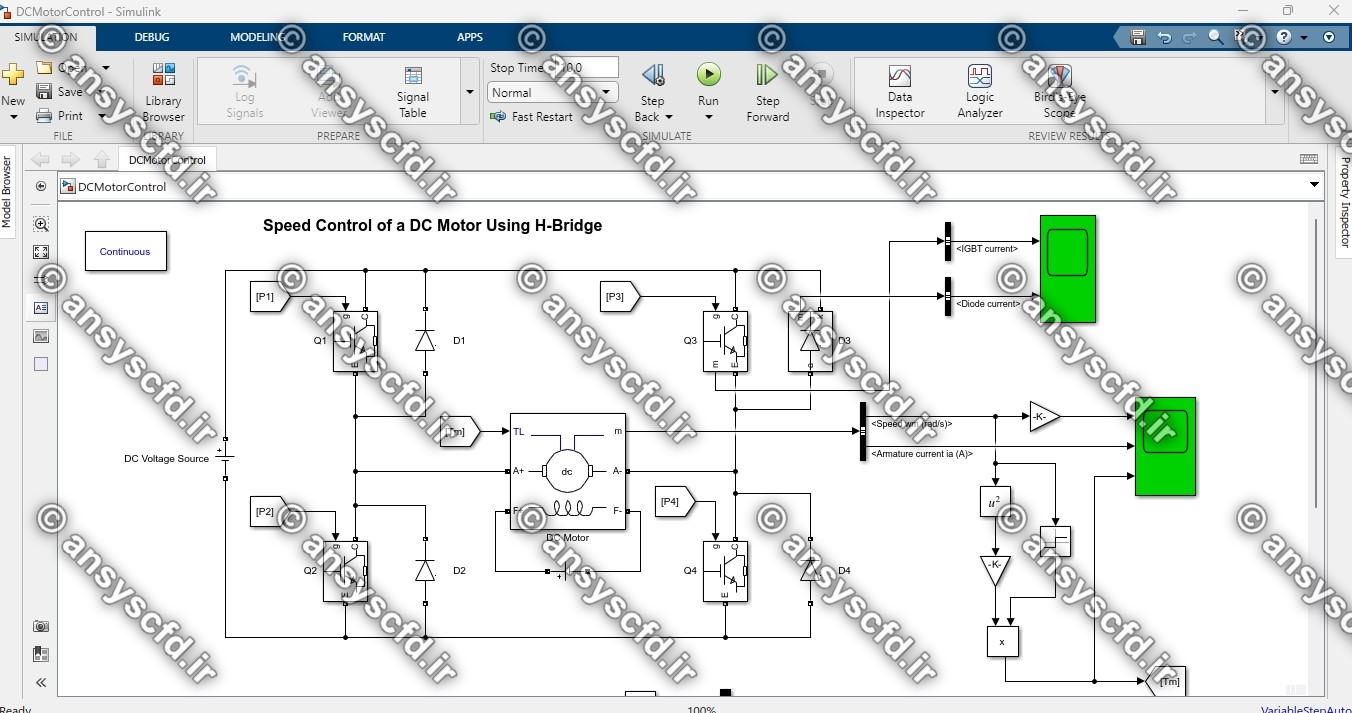
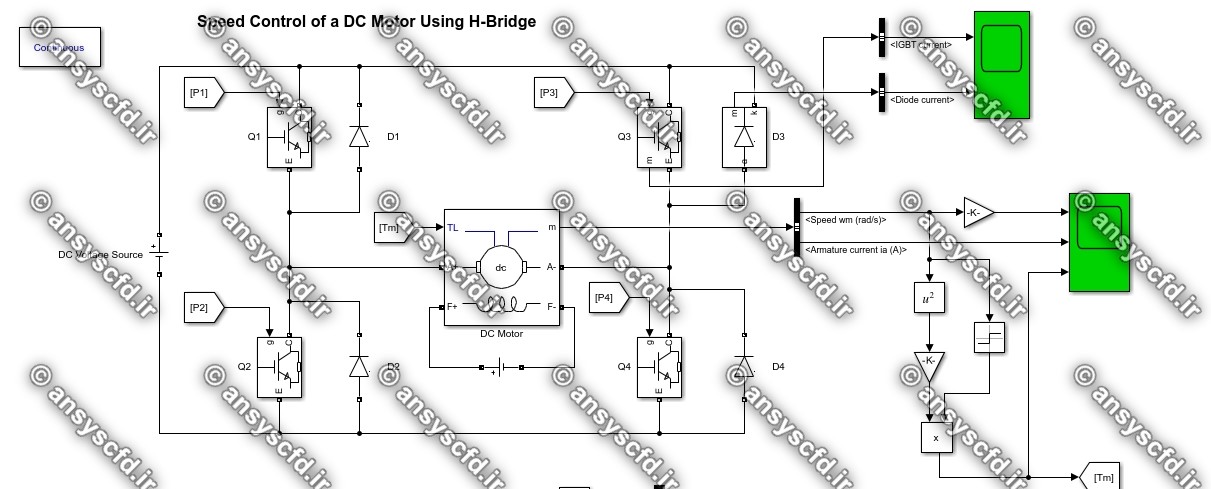
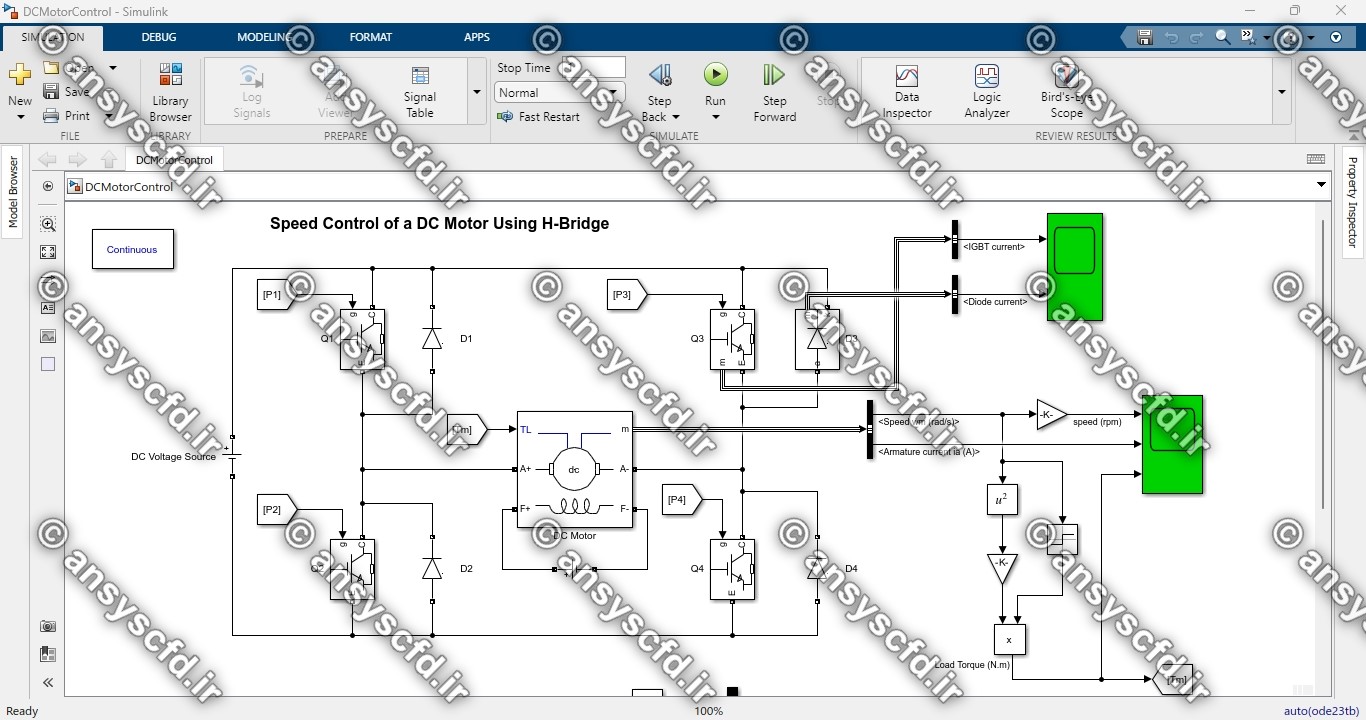
آموزش ویدیویی پروژه شبیه سازی کنترل دور موتور DC با استفاده از مبدل پل H برمبنای PWM در سیمولینک متلب(MATLAB Simulink)+فایل های پروژه+ترجمه مقاله
شرح پروژه:
در این محصول آموزشی، علاوه بر آموزش ویدیویی پروژه شبیه سازی کنترل دور موتور DC با استفاده از مبدل پل H برمبنای PWM در سیمولینک متلب(MATLAB Simulink)، فایل های نرم افزاری پروژه و ترجمه مقاله و تصاویر مرحله به مرحله از اجرای پروژه را نیز دریافت خواهید کرد.
مدت فیلم آموزشی 43 دقیقه
**توجه**
**تمامی فیلم های آموزشی با کیفیت بالا و بدون رکورد صدا توسط پژوهشگران مجموعه انسیس سی اف دی ضبط و تهیه شده اند**
عنوان انگلیسی مقاله:
Reliable speed control of a permanent magnet DC motor using fault-tolerant H-bridge
عنوان فارسی مقاله:
کنترل دور موتور DC با استفاده از مبدل پل H برمبنای PWM و کنترل کننده تحمل پذیر عیب(FTC)
سال انتشار: 2020
ترجمه چکیده مقاله:
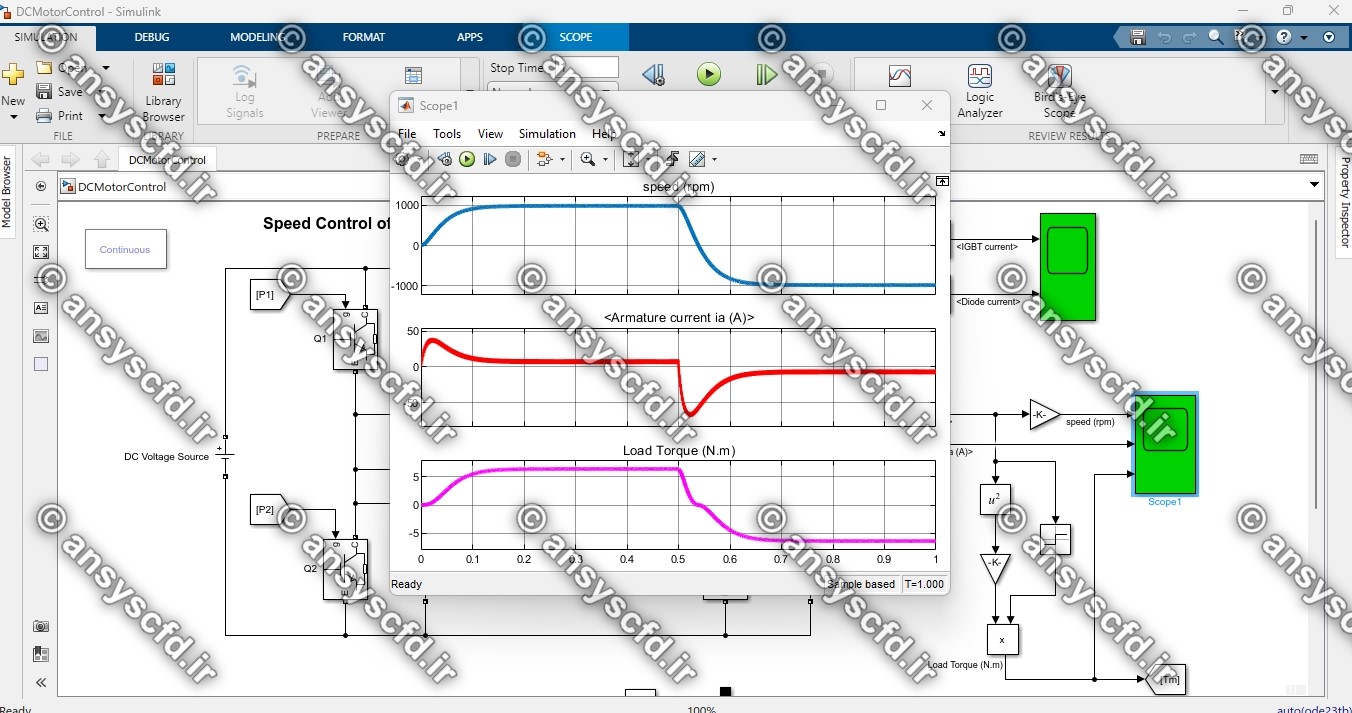
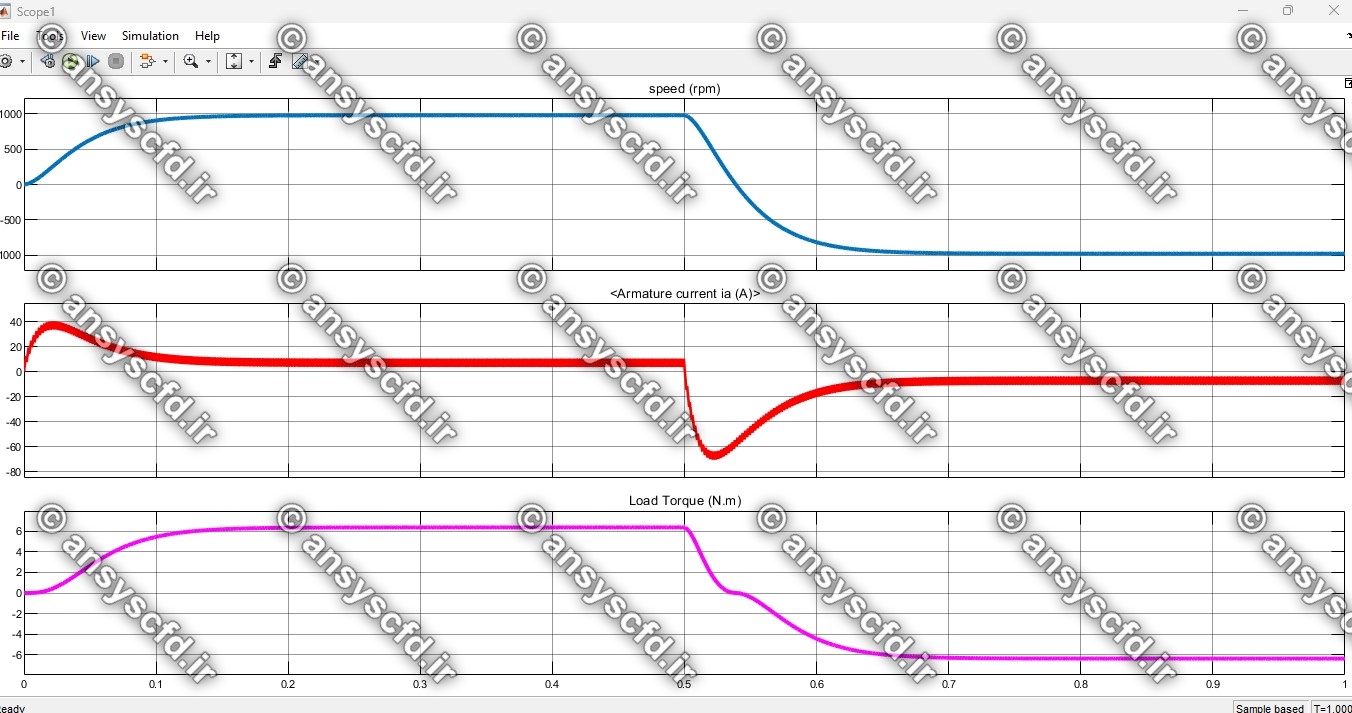
کنترل مطمئن، و بی عیب یک موتور DC با استفاده از مبدل پل H یک نیاز مبرم است که در بسیاری از صنایع از جمله صنایع رباتیک، خودروسازی، و صنایع فرآیندی کاربرد دارد و منجر به بهبود و افزایش راندمان و بازدهی می شود. در سیستم های صنعتی که در آن تعمیر و نگهداری همیشه بلافاصله محقق نمی شود، طراحی یک روش کنترل که عملکرد سیستم را در حضور و با احتساب رخداد عیب تضمین کند، ضروری است. این کنترل به عنوان کنترل تحمل پذیر عیب شناخته شده است و در چنددهه گذشته اهمیت زیادی پیدا کرده است. قابلیت اطمینان مبدل پل H به پارامترهایی از جمله سوئیچ های نیمه هادی بکاررفته در آن وابسته است. عیوب و خرابی ها در این قطعات می تواند منجر به خرابی کامل و از کارافتادن کل سیستم گردد. طراحی سیستم های کنترل کننده تحمل پذیر عیب، مستلزم تشخیص و جداسازی عیوب برای تصمیم گیری مناسب است. از اینرو برای حفظ ایمنی و قابلیت اطمینان فرآیندها حضور عیب در هنگام طراحی سیستم های کنترل بایستی درنظرگرفته شود. در این مقاله از یک استراتژی افزونگی برای یک سیستم تحمل پذیر در مقابل عیب همراه با یک واحد تشخیص و جداسازی عیب(FDI) استفاده شده است که قادر به تشخیص، جداسازی عیب و تعویض سوئیچ معیوب با سوئیچ آماده به کار برای پیشگیری از کارافتادن ناخواسته سیستم م یباشد، و باعث افزایش قابلیت اطمینان سیستم می گردد. به منظور شبیه سازی این سیستم و کنترل دور موتور DC در صورت رخداد عیوب از محیط نرم افزار سیمولینک متلب(MATLAB Simulink) استفاده شده است. نتایج نشان می دهند که با استفاده از مبدل پل H تحمل پذیر در مقابل عیب و استراتژی افزونگی همراه با واحد تشخیص و جداسازی عیب(FDI) تأثیر بسزایی بر افزایش قابلیت اطمینان کل سیستم و همچنین در کنترل دور موتور DC خواهد داشت.
کلیدواژگان: سوئیچ های ذخیره، کنترل تحمل پذیر عیب، پل H، سرعت موتور DC، ترانزیستورهای IGBT.
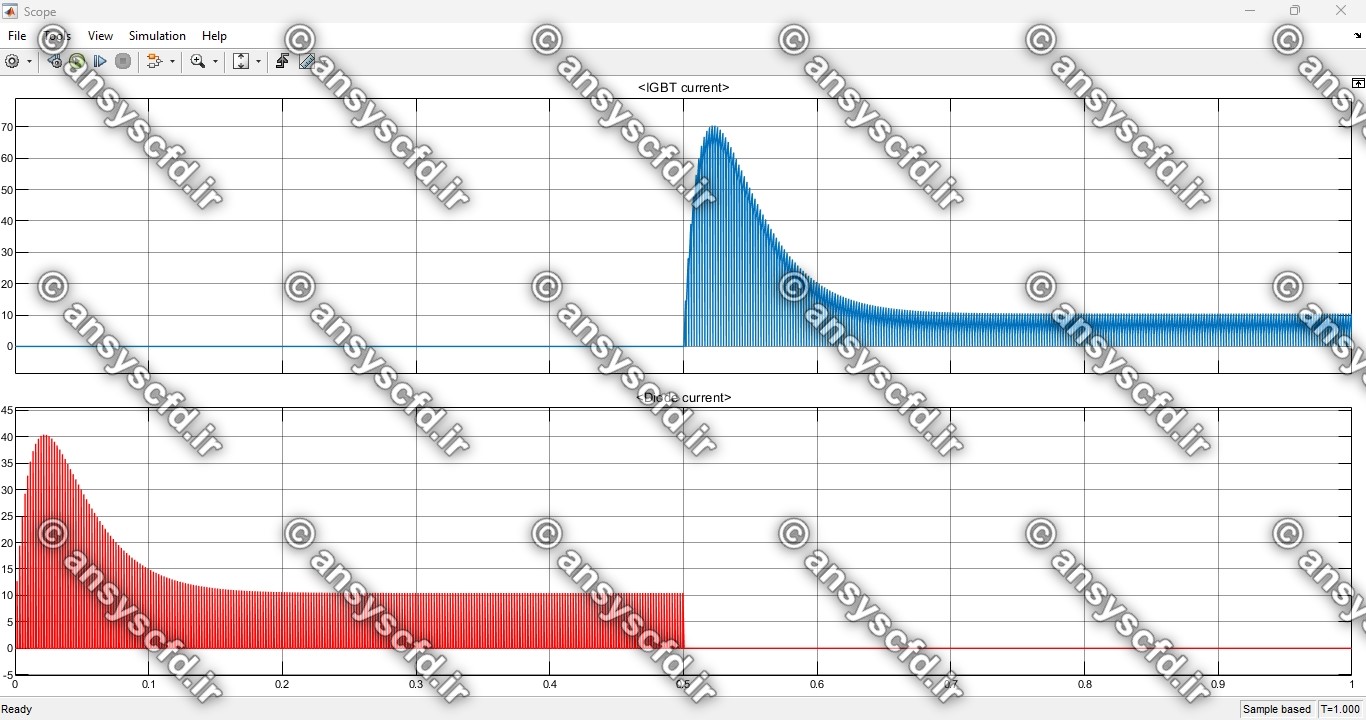
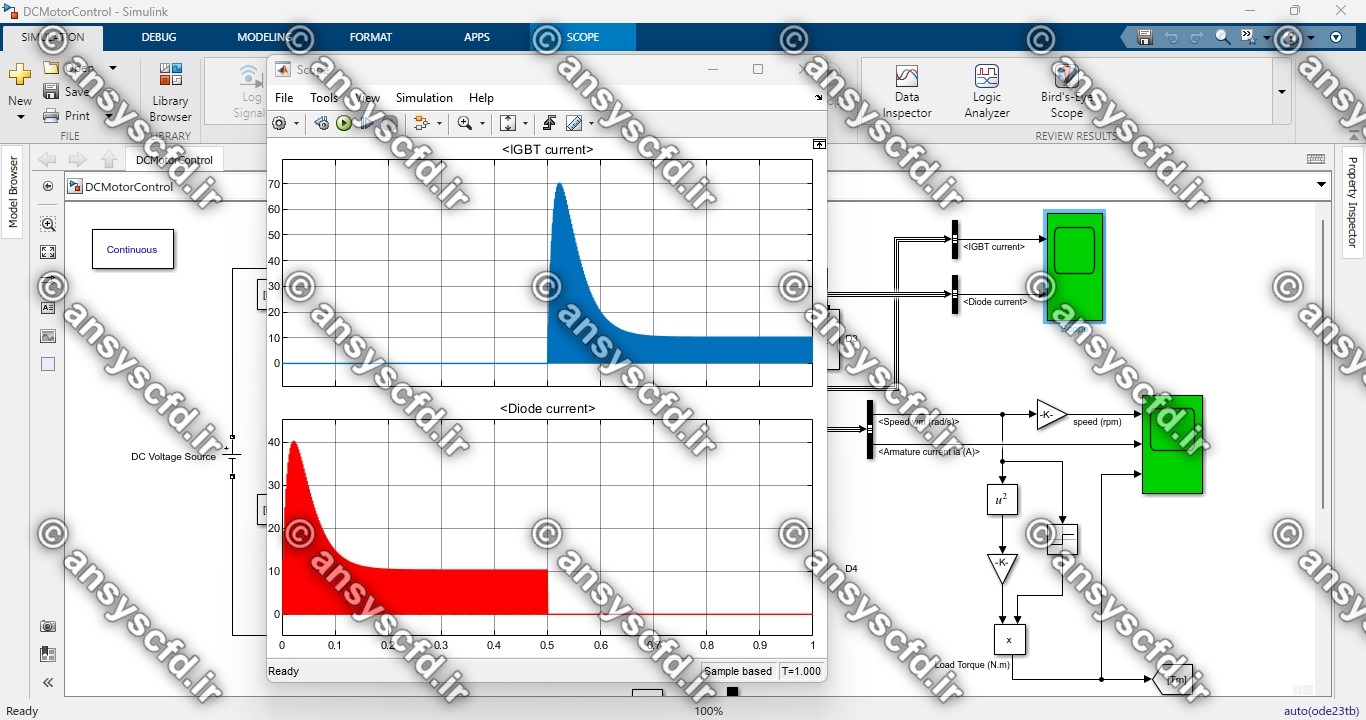
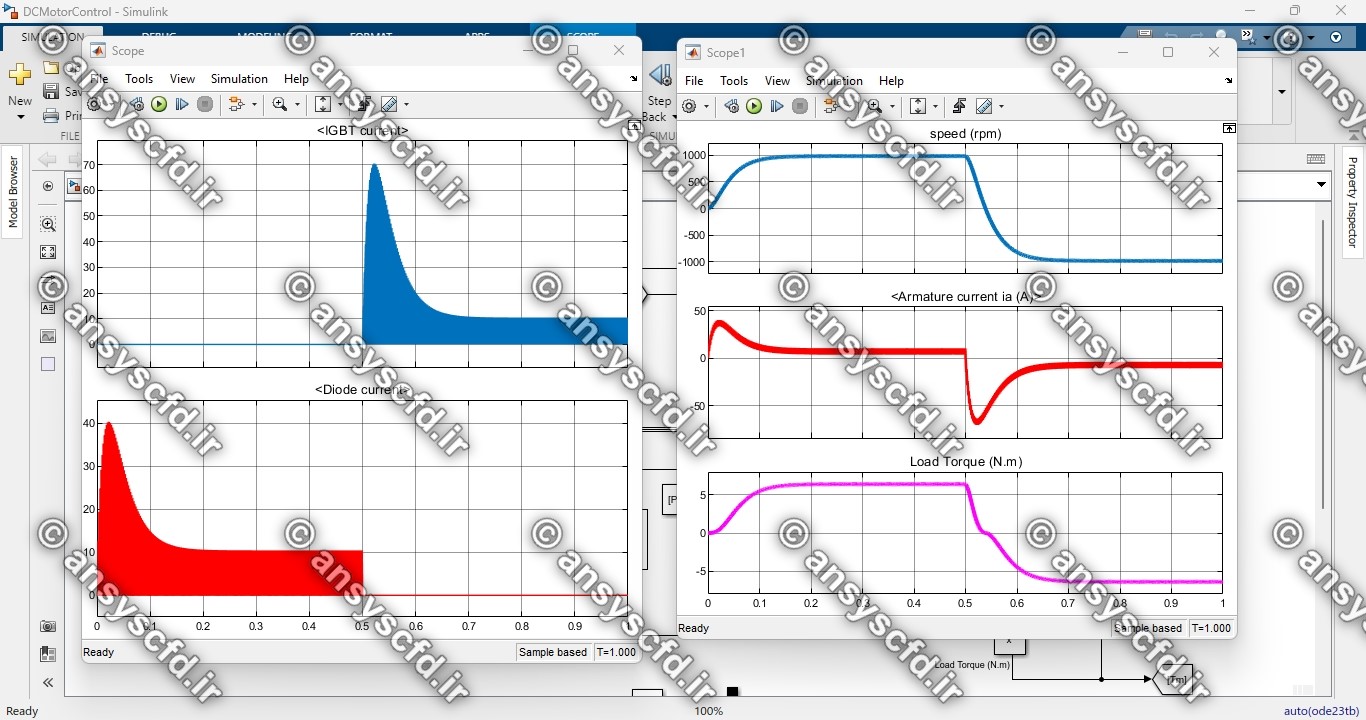
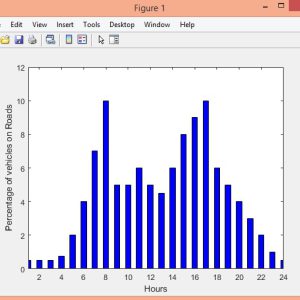
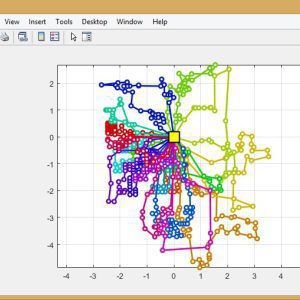
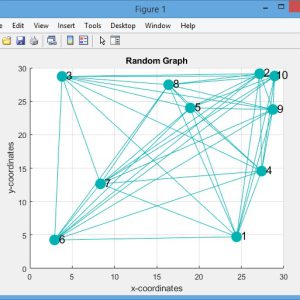
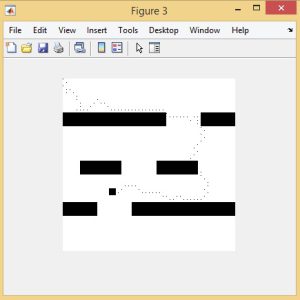
نمونه نتایج شبیه سازی: