توضیحات
پروژه شبیه سازی و سیمولینک متلب کنترل سرعت موتور DC بدون جاروبک(BLDC) همراه اینورتر تغذیه شده با باتری
موتورهای DC بدون جاروبک (BLDC):
موتور BLDC در مراجع مختلف دارای تعاریف متفاوتی می باشد. استاندارد انجمن ملی سازندگان تجهیزات الکتریکی، موتور BLDC را اینگونه تعریف می نماید: یک موتور بدون جاروبک، ماشین دوار خود سنکرونی است که دارای روتور مغناطیس دائم بوده و از موقعیت های مشخصی از شافت دوار روتور، جهت کموتاسیون الکترونیکی استفاده می شود. این موتور می تواند همراه با درایوهای الکترونیکی مربوطه بصورت مجتمع باشد یا اینکه موتور از درایو مربوطه جدا باشد.
Kusko نیز تعریف زیر را بیان می کند:
یک موتور که دارای سیم پیچی استاتور بوده و یک روتور مغناطیس دائم برجسته از جنس آهن نرم دارد. سیم پیچ های استاتور از یک منبع تغذیه اولیه DC و به توسط یک ماتریس از سوئیچهای حالت جامد تغذیه گشته و عمل کنترل با استفاده از سنسورهای وضعیت و با منطقی مشخص انجام می شود. در غیاب یک رگولاتور، سرعت موتور متناسب با ولتاژ DC اولیه می باشد.
موتور BLDC اساساً دارای ساختاری مشابه یک مغناطیس دائم دوار همراه با یک مجموعه از هادی های حامل جریان می باشد. از این نظر، مشابه با یک موتور کموتاتور DC معکوس شده نیز می باشد که مغناطیس می چرخد اما هادی های جریان، ایستان باقی می مانند. در هر دو حالت، برای ثابت ماندن جهت گشتاور در یک جهت، جریان در هادی ها می بایست در هر زمان که یک قطب مغناطیسی از روبروی آن عبور می کند، پلاریتهاش نیز معکوس شود. در یک موتور کموتاتور DC معکوس شدن پلاریته با کموتاتور و جاروبک ها انجام می شود. چون کموتاتور نسبت به روتور ثابت می باشد. لحظات سوئیچ زنی بطور اتوماتیک با تغییر پلاریته میدان مغناطیسی هادی ها سنکرون می گردد. در یک موتور BLDC معکوس شدن پلاریته با کلیدزنی ادوات الکترونیک قدرت انجام می گردد. پروسه کموتاسیون در هر دو نوع ماشین، شبیه به هم بوده و سنکرون با وضعیت روتور می باشد و لذا معادلات دینامیکی مربوطه و مشخصه های سرعت-گشتاور آنها یکسان می باشند.
مزایا و معایب موتور BLDC :
موتورهای BLDC مغناطیس دائم که در صنایع اتومبیل سازی و هوافضا، مورد استفاده قرار می گیرند شامل مزایای ذیل می باشند:
نویز پائین: بدلیل عدم نیاز به هیچ گونه جاروبک مکانیکی یا حلقه های لغزان در موتورهای مغناطیس دائم BLDC تمام نویزهای مکانیکی به استثنای نویزهای مربوط به بلبرینگ ها، کوپلینگ ها و بار حذف می شوند.
بهره بالا: برای موتورهای BLDC ثابت شده است که بالاترین بهره را در بین موتورهای موجود دارند. بهره بالاتر موتورهای BLDC در اصل بواسطه وجود میدان مغناطیس دائم موتور می باشد که میدانی پیوسته و ثابت بوده و مصرف توان الکتریکی ندارد. خصوصیت مهم دیگر مغناطيس ها، طول عمر درازشان می باشد که تحت شرایط کاری مناسب، ضریب مغناطیس زدایی پائینی دارند.
کاهش ملزومات تحریک: مغناطیس های دائم یک میدان مغناطیسی ثابت ایجاد می کنند که بهره را با کاهش نیاز به ایجاد یک میدان تحریک الکترومغناطیسی که در دیگر انواع موتورها لازم است، افزایش می دهند.
نگهداری کم و طول عمر بیشتر: چون هیچ جاروبک مکانیکی وجود ندارد و اثری هم از حلقه های لغزش نمی باشد، طول عمر موتور وابسته به طول عمر عایقی بلبرینگها و عمر مغناطیسی می باشد.
سهولت در کنترل: در موتور BLDC گشتاور خروجی مستقیما متناسب با جریان موتور است که در نتیجه عمل کنترل به راحتی انجام می گردد. لذا بسیاری از سازندگان نیمه هادیها، برای موتورهای BLDC ادوات نیمه هادی قدرت با مدارات درایو گیت در بسته های ۶ تایی مجتمع طراحی می کنند تا نیازهای اینورتر درایو موتور را برآورده سازند و لذا قیمت کلی سیستم و درایو کاهش می یابد.
ساختار مجتمع و متراکم: کاربردهای هوافضا و اتومبیل، نیاز به تجهیزات با وزن کمتر و حجم کوچکتری دارند تا بهره سوخت مصرفی را افزایش دهند و لذا نیاز به ذخیره سازی انرژی کمتری داشته باشند. اخیرا مواد مغناطیسی با دانسیته بالا نظير ساماریوم-کبالت و نئودیمیم آهن بور به بازار مصرف عرضه شده اند که دانسیته انرژی ماشین را برای این کاربردها افزایش می دهند.
با وجود مزایای ذکر شده، این موتورها دارای مشخصات و معایب ذاتی می باشند که عبارتند از:
قیمت مواد مغناطیسی: قیمت های مواد مغناطیس دائم با دانسیته انرژی بالاتر، مانع از استفاده از آنها در کاربردهایی که قیمت و هزینه استفاده از این مواد بیشتر از ایجاد مزایای مذکور می باشد، می شود. بعنوان مثال سرامیک ها، کمترین قیمت را دارند و از طرفی دارای کمترین دانسيته انرژی نیز می باشند. مغناطیس دائم از نوع (Nd Fe B) بالاترین دانسیته انرژی را دارد که در حدود سه برابر قیمت سرامیک می باشد. مگنت ساماریوم کبالت، دانسیته انرژی قابل مقایسه ای با مگنت(Nd FeB) داشته ولی در حدود ۶ برابر سرامیک، قیمت دارد.
احتمال مغناطيس زدایی: در استفاده از مواد مغناطیس دائم باید مراقبت زیادی در برابر مقادیر بالای نیروهای مغناطیس زدا و با درجه حرارت های بالا که می توانند اثر مغناطیسی مگنت را از بین ببرند، به عمل آید.
علاوه بر موارد فوق می توان به خطرات ناشی از وقوع خطاهای اتصال کوتاه در مبدل برای سیم بندی های استاتور، ناحیه توان ثابت محدود و قابلیت کم عملکرد در سرعتهای بالا نیز اشاره نمود.
ساختمان موتور BLDC :
موتورهای BLDC یک نوع خاص از موتورهای سنکرون می باشند. این مطلب به آن معنا است که میدان مغناطیسی ایجاد شده توسط استاتور و میدان مغناطیسی ایجاد شده توسط روتور با فرکانسی واحد دوران می کنند. موتورهای BLDC فاقد پارامتری بنام لغزش، مشابه آنچه در موتورهای القایی مشاهده می شود هستند. موتورهای BLDC در ساختارهای تکفاز، دوفاز، سه فاز، پنج فاز و همچنین با تعداد فاز بالاتر وجود دارند. متناظر با هر یک از انواع مذکور، استاتور نیز به همان تعداد دارای سیم پیچ است. اما نوعی که فراگیر بوده و بیشتر مورد استفاده قرار می گیرد، نوع سه فاز می باشد.
استاتور:
استاتور موتور BLDC شامل ورقه های فولادی دسته بندی شده ای است که به همراه سیم پیچ ها در شیارهایی جاسازی شده اند که دو سر آنها در راستای محیط داخلی موتور قرار دارند.
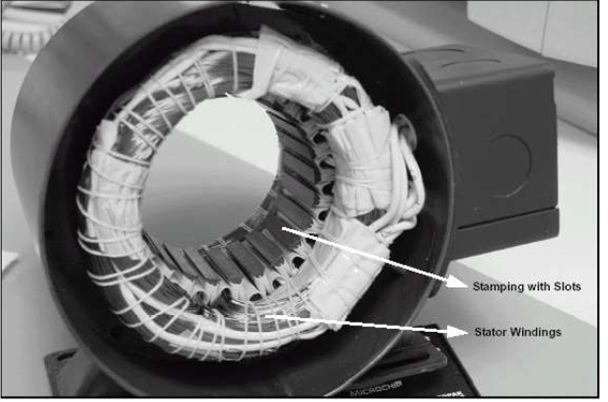
شکل استاتور یک موتور BLDC.
استاتور موتور BLDC شبیه به استاتور موتور القایی می باشد اما الگوی سیم بندی متفاوتی دارد. اغلب موتورهای BLDC دارای سه سیم پیچ استاتور می باشند که به صورت ستاره به یکدیگر متصل شده اند. هر سیم پیچ متشکل از تعدادی زیاد حلقه بوده که متوالیا و با آرایشی خاص به یکدیگر متصل هستند. هر سیم پیچ در داخل استاتور به نحوی توزیع شده است تا تشکیل یک قطب را بدهد. دو نوع آرایش سیم بندی برای استاتور وجود دارد که درنتیجه آن موتورهای BLDC ذوزنقه ایی و موتورهای BLDC سینوسی مطرح می شوند. این تفاوت از نحوه اتصال کویلهای استاتور ظاهر می گردد که در نتیجه دو نوع مختلف ولتاژ ضد محرکه الکترومغناطیسی (Back-EMF) پدید می آید.
موتور BLDC با تغذیه ولتاژ سینوسی (BLAC):
در نوع تغذیه سینوسی که در واقع همان ماشین سنکرون مغناطیس دائم(PMSM) می باشد برای ایجاد شار سینوسی علاوه بر اینکه توزیع سیم پیچی فازهای استاتور سینوسی است، ولتاژ اعمالی به فازهای استاتور نیز سینوسی می باشد.
لذا دانستن مقدار لحظه ایی موقعیت روتور الزامی بوده و در نتیجه باید از اینکودرهای موقعیت دقیق استفاده نمود. مقدار گشتاور لحظه ایی در این نوع موتور بسیار صاف بوده و ریپل گشتاور ناچیز می باشد. با این وجود ایجاد سیم بندی سینوسی با پیچیدگی بیشتری همراه بوده و تعداد اتصالات داخلی بیشتری را می طلبد. در مجموع، ساخت استاتور با اتصال سینوسی هزینه بیشتری را تحمیل می نماید. این موتور بنام موتور BLAC نیز شناخته می شود.
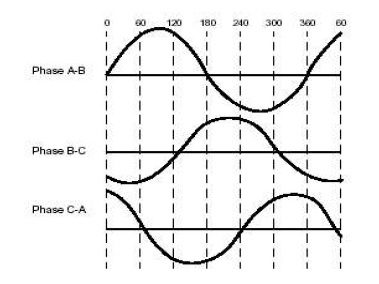
شکل موج ولتاژ Back-EMFیک موتور BLDC سینوسی.
موتور BLDC با تغذیه ولتاژ ورودی ذوزنقه ای:
در این نوع موتور توزیع سیم پیچی فازهای استاتور به صورت ذوزنقه ایی بوده و ولتاژ اعمالی به فازها نیز به صورت ذوزنقه ایی یا مربعی می باشد. در این ساختار، نیازی به دانستن مقدار لحظه ایی موقعیت روتور نبوده و می توان از سه سنسور وضعیت از نوع اثر هال که در فواصل ۱۲۰ درجه نسبت به یکدیگر قرار گرفته اند استفاده نمود. محاسبات و عمل کنترلی در این نوع موتور نسبت به نوع سینوسی بسیار ساده تر می باشند. در چگالی شار و اندازه یکسان برای هر دو نوع موتور ذوزنقه ایی و سینوسی، نوع ذوزنقه ایی بدلیل توزیع سیم بندی ذوزنقه ای، به مقدار ۱۵٪ گشتاور بیشتری تولید می کند. اما از طرف دیگر بدلیل همپوشانی کموتاسيون فازها، ریپل گشتاور در این نوع موتور بیشتر از نوع سینوسی است.
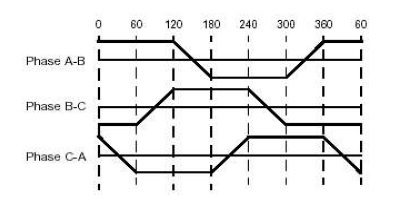
شكل موج ولتاژ Back-EMF یک موتور BLDC ذوزنقه ای.
موتورهای BLDC در مقادیر ولتاژ تغذيه مختلفی ساخته می شوند. برای کاربردهای رباتیک و سیستمهای Servo سطح ولتاژ ۴۸ ولت و یا کمتر انتخاب می شود. در حالیکه موتورهای با تغذیه ۱۰۰ ولت به بالا در اتوماسیون و کاربردهای تراکشن بکار می روند.
روتور:
روتور یک موتور BLDC از مواد مغناطیسی ساخته می شود و تعداد زوج قطب ها از یک تا ۸ عدد تغییر می نماید. برحسب چگالی میدان مغناطیسی مورد نیاز در روتور، مواد مغناطیسی مناسب برای ساخت روتور استفاده می گردد. مگنت های فریت معمولا برای ساخت مغناطیس دائم بکار می رود. فریتها ارزان قیمت هستند ولی چگالی فلوی پائینی دارند. آلیاژهای مواد مغناطیس دائم کمیاب مانند نئودیم (Nd)، ساماریوم کبالت (SmCo) موادی با چگالی بالا بوده که گران قیمت می باشند. روتور موتورهای مغناطیس دائم معمولا در پیکربندی های ذیل ساخته می شوند:
١- نوع مغناطيس داخلی (Interior-Magnet Rotor)
۲- نوع مغناطيس سطحی یا خارجی (Surface-Magnet Rotor)
Inset-Magnet Rotor 3
در نوع Interior، بدلیل آنکه در سطح روتور، ناحیه مغناطیس دائم کوچکتر از ناحیه قطب می باشد چگالی شار فاصله هوایی در قسمت مدار باز کوچکتر از مقدار آن در داخل مگنت می باشد. اندوكتانس محور d نیز از اندوکتانس محورq و کمتر می باشد. در این پیکربندی، مگنت بسیار خوب محافظت شده و برای کاربردهای سرعت بالا بسیار کاربرد دارد.
موتور نوع Surface Magnet دارای ساختار ساده تری بوده و مگنت نیز چندان محافظت نمی شود. کاربرد این موتور برای کاربردهای سرعت متوسط تا بالا می باشد. بیشترین کاربردشان موتورهای درایوهای دیسک ثابت کامپیوترها می باشد. این کاربرد نیاز به یک سرعت یکنواخت و ثابت داشته و اینرسی بالای روتور مغناطیس سطحی یک مزیت در بدست آوردن این اهداف می باشد.

شکل پیکربندی های مختلف روتور در یک موتور مغناطیس دائم.
سنسورهای هال:
برخلاف موتور DC جاروبک دار، کموتاسیون یک موتور BLDC بصورت الکترونیکی صورت می گیرد. برای چرخش موتور، سیم پیچ های استاتور باید با ترتیبی مناسب تحریک گردند. برای تحریک سیم پیچ های استاتور، دانستن وضعیت روتور بسیار اهمیت دارد. وضعیت روتور توسط سنسورهای اثر هال جاسازی شده در استاتور تعیین می گردد. اغلب موتورهای BLDC دارای سه سنسور هال می باشند. هر زمان که قطب های مغناطیسی روتور از نزدیکی یک سنسور هال عبور می نمایند یک سیگنال High یا Low که مبین عبور قطب N یا S از نزدیکی سنسور می باشد، ایجاد می نمایند. براساس ترکیب سیگنال های ایجاد شده توسط این سه سنسور، ترتیب دقیق کموتاسیون قابل تعیین است. جاسازی سنسورهای هال بر روی استاتور فرایند ساده ایی نمی باشد زیرا غيرهم محور بودن سنسورها نسبت به مگنت های روتور منجر به ایجاد خطا در تعیین وضعی روتور می شود. برای سهولت عمل جاسازی سنسورهای هال بر روی استاتور از سه عدد مگنت کوچک بر روی روتور استفاده می شود که این مگنت ها نزدیک به سنسورهای هال قرار دارند. بر اساس مکان فیزیکی، سنسورهای هال دو نوع آرایش وجود دارد. سنسورهای هال می توانند در مکان های ۶۰ درجه یا ۱۲۰ درجه نسبت به یکدیگر قرار گیرند. ترتیب کموتاسیون باید بر اساس نوع آرایش بکار رفته تعیین گردد.
تاریخچه موتورهای DC بدون جاروبک مغناطیس دائم:
موتورهای DC تا سال ۱۹۷۰ به عنوان موتورهای کنترلی دقیق استفاده می شدند. محدودیت هایی که در موتورهای DC وجود دارد، همچون حساس بودن، عدم تحمل اضافه بار، محدوده کوچک تغییرات سرعت و نیازمند بودن به تعمیر و نگهداری مداوم (به ویژه از جاروبکها و تیغه های کموتاتور)، محققان را واداشت تا سالها به دنبال جایگزین مناسبی برای موتورهای DC جهت کاربرد در محرکه های پیشرفته تر باشند. پیشرفت هایی که در زمینهی ریزپردازنده ها، موتور الکتریکی و تکنولوژی نیمه هادیها اتفاق افتاده، تمایل به استفاده از موتورهایAC را در محرکه های با بازده بالا افزایش داده است.
موتورهای AC به دلیل رابطهی دور آنها با فرکانس تغذیه اصولا به عنوان موتورهای با دور ثابت شناخته می شوند. تا پیش از پیدایش تکنولوژی به کار گیری عناصر نیمه هادی در کنترل سرعت موتورهای AC، عموما از این موتورها در فرایندهایی که به دور ثابت نیاز داشتند و یا حساسیت چندانی به تغییر دور نداشتند استفاده می شده است. البته در گذشته نیز با به کارگیری روش هایی همچون تغییر تعداد زوج قطب های ماشین، استفاده از مقاومت در مدار روتور یا استفاده از موتورهای AC کموتاتور دار مانند موتور شیراک، در موارد خاص و با محدودیت زیاد، دور موتور را تغییر می دادند. تکنولوژی بکارگیری نیمه هادی ها در کنترل دور موتورهای AC در دو دهه گذشته متداول گردیده است. تا پیش از پیدایش آن بدلیل محدودیت های ذکر شده، همچنین غیر اقتصادی بودن، نداشتن بازده بالا و گران تمام شدن کنترل دور موتورهای AC موتورهای DC یکه تاز میدان تغییرات سرعت در صنعت محسوب می شدند. بنابراین وقتی که تریستور در اواخر سال ۱۹۵۰ وارد بازار شد، بلافاصله در یکسوکننده های کنترل شده جهت تنظیم دور موتورهای DC به کار گرفته شد.
در اوایل دهه60 میلادی، اینورترهای نیمه هادی با تکنیک های کموتاسيون ظریف، به طور جداگانه توسط چند محقق در مقالاتی ارائه شد. پس از چندی این مباحث تئوری به مرحله عمل رسیده و اولین منبع تغذیه با راندمان خوب و ولتاژ و فرکانس متغير جهت کنترل موتورهای AC ساخته شد. موتورهای AC خصوصا نوع مغناطیس دائم آن در مقایسه با موتورهای DC دارای چند مزیت خاص هستند. این موتورها ارزان ترند، وزن و حجم کمتری دارند، عمر طولانی تری دارند، استهلاکشان کمتر است، نیاز به تعمیر و نگهداری کمتری دارند، اینرسی کمتری به هنگام راه اندازی و کار دارند، راندمانشان بیشتر است و بالاخره به دلیل نداشتن جاروبک و کموتاتور قابلیت کار در محیط های مرطوب و قابل انفجار را دارند. بعضی از این مزایا دارای اهمیت بیشتری هستند و باعث می شوند موتورهای AC در بسیاری از کاربردها به موتورهای DC ترجیح داده شوند. علاوه بر این وقتی کنترل دقیق سرعت مورد نظر باشد یا کنترل سرعت همزمان چندیدن موتور در یک محیط صنعتی مورد نیاز باشد، موتورهای سنکرون به خصوص نوع PM آن بهترین انتخاب هستند. علیرغم تمام این مزایا، گران بودن اینورتر و پیچیدگی مدارها مانع از جایگزینی وسیع سیستم های رانش DC به سیستم های AC شده است.
در سال های اخیر، برای ساده سازی مدارهای کموتاسیون، تریستورهای نوری مطرح شده اند و بالاخره با جایگزین کردن عناصر نیمه هادی منفصل با مدارهای مجتمع و همچنین استفاده از میکروکامپیوتر در جهت طراحی مدارهای کنترل، امکان ساخت موتورهایAC با سیستم کنترل روی بدنه مقدور است. استفاده از میکروکامپیوترها در مدارهای کنترل، نه تنها باعث سادگی سخت افزار سیستم می شود و قابیت آن را افزایش میدهد بلکه امکان بهینه کردن کارایی آن را که توسط سخت افزار امکانپذیر نبوده یا بسیار دشوار بوده فراهم می کند.
بسته به نحوه سیم پیچی استاتور و توزیع آهن ربای دائم روی روتور، موتور سنکرون مغناطیس دائم را می توان به دو دسته تقسیم کرد:
١- موتور سنکرون مغناطیس دائم که با موج ذوزنقه ای شکل تغذیه می شود که به موتور DC بدون جاروبک(BLDC) معروف است.
۲- موتور سنکرون مغناطیس دائم تغذیه شونده با موج سینوسی که به موتور سنکرون مغناطیس دائم(PMSM) معروف است.
پاسخ دقیق و سریع، مقاومت پاسخ در برابر اغتشاشات و عدم حساسیت به تغيير پارامترها، معیار اصلی سیستم های محرکه با بازده زیاد هستند که در کاربردهای رباتیکی، سیستم های دورانی و … مورد استفاده قرار میگیرند. در این کاربردها مشخصه های رفتاری معادل موتور DC رابا اعمال روش کنترل برداری حلقه بسته روی PMSM می توان بدست آورد. سیستم محرکهPMSM با کنترل برداری، به دلیل مجزاکردن گشتاور و شار کنترل را ساده تر و پاسخ را سریعتر خواهد کرد. کنترل کننده ی سرعت مورد استفاده در سیستم محرکه PMSM نقش مهمی را در رسیدن به معیارهای مورد نیاز یک محرکه پر بازده بازی می کند. محرکه باید قابلیت پیروی از هرگونه سرعت مرجع را در حضور تغییرات بار، اشباعو تغییرات پارامتر را داشته باشد. کنترل کننده های متداول نظير کنترل کننده PID بطور گسترده در محرکه های موتورهای AC و DC استفاده شده اند. ولی اگر مدل دقیق تری از سیستم در دسترس نباشد، طراحی اینگونه کنترل کننده ها کار دشواری است. بعلاوه دینامیکهای ناشناخته بار و سایر عوامل نظير نویز، حرارت، اشباع و ..در محدوده ی وسیعی از سرعت روی رفتار محرکه تاثیر می گذارند.PMSMها در سرعت بالا (500 تا ۱۰۰۰۰۰ دور در دقیقه) با داشتن امپدانس بسیار کوچک استاتور از دید تغذیه و کنترل با چالشهای جدی روبرو هستند. علاوه بر این نیازمند کنترل بدون حسگر میباشند زیرا در سرعت های بسیار زیاد سنسورهای موقعیت قابل اطمینان نیستند. موتورها در دور بالا نیاز به اینورترهای با توان بالا و فرکانس کلید زنی بسیار بالایی دارند. همچنین نیازمند حلقه های کنترلی بسیار سریع هستند. زیرا دارای مقاومت و اندوکتانس استاتور بسیار کوچکی هستند که کار تنظیم جریان استاتور را بسیار مشکل می نماید و پردازنده آن باید دارای زمان نمونه برداری بسیار کوتاهی باشد. همچنین نیاز به الگوریتم های تخمین موقعیت دارند.
کنترل مستقیم گشتاور(DTC):
با توجه به کاربرد موتور DC بدون جاروبک، از روش های مختلفی برای کنترل سوئیچینگ مبدل های الکترونیک قدرت استفاده می شود. برای کنترل گشتاور الكترومغناطیسی اصولا دو روش کنترل برداری و کنترل مستقیم گشتاور به کار برده می شود که روش کنترل مستقیم گشتاور به دلیل کارایی دینامیکی بالا اخيرا مورد توجه قرار گرفته است. در این روش کنترل گشتاور و سرعت مستقیما بر پایه کنترل شار الكترومغناطیسی موتور انجام می شود. مزیت این روش، پاسخ گشتاور سریع، فرکانس سوئیچینگ پایین و تلفات هارمونیکی کمتر است. همچنین نسبت به روش کنترل برداری به پارامترهای ماشین و تغییرات آن کمتر وابسته است و ساده تر اعمال می شود. در کل در محرکه های موتور DC بدون جاروبک از کنترل جریان استفاده می شود که ضرورتا فرض می شود گشتاور الکترومغناطیسی با جریان فاز متناسب است. اما در عمل این نسبت غیر خطی است. روش های مختلف کنترل جریان برای کاهش نوسان گشتاور با به کار بردن شکل موجهای بهینه شده برای جریان مرجع اعمال می شود. بسیاری از این روش قادر به پاسخ سریع برای گشتاور نیستند. در روش کنترل مستقیم گشتاور که توسط ABB در ابتدا برای ماشین های القایی گسترش یافته بود، موتور DC بدون جاروبک توسط اینورتر تغذیه شده و شار پیوندی استاتور و گشتاور الکترومغناطیسی بطور مستقیم و مستقل، بوسیله بردارهای سوئیچینگ ولتاژ بهینه اینورتر کنترل می شود . هدف اصلی انتخاب بردار سوئیچینگ ولتاژ به گونه ای است که سریع ترین پاسخ گشتاور الكترومغناطیسی به دست آید. در مقایسه با روش کنترل برداری، روش کنترل مستقیم گشتاور مزیت های زیادی دارد. مثلا در کنترل مستقیم گشتاور به کنترل کننده های جریان نیازی وجود ندارد، چراکه در این محرکه ها با توجه به خطای شار دربرگیرنده و گشتاور الکترومغناطیسی، بهترین بردار ولتاژ سوئیچ زنی انتخاب و به ماشین اعمال می شود. در کنترل مستقیم گشتاور ماشین DC بدون جارویک، فرمان های شار پیوندی استاتور و گشتاور از یک کنترل کننده هیستریزیس اعمال می شود که بر اساس مقایسه مقادیر شار پیوندی و گشتاور الكترومغناطیسی موتور با مقادیر دلخواه عمل می کند و نهایتا الگوی کلیدزنی اینورتر بر اساس موقعیت بردار شار و خطای گشتاور و شار بدست می آید.
شرح پروژه:
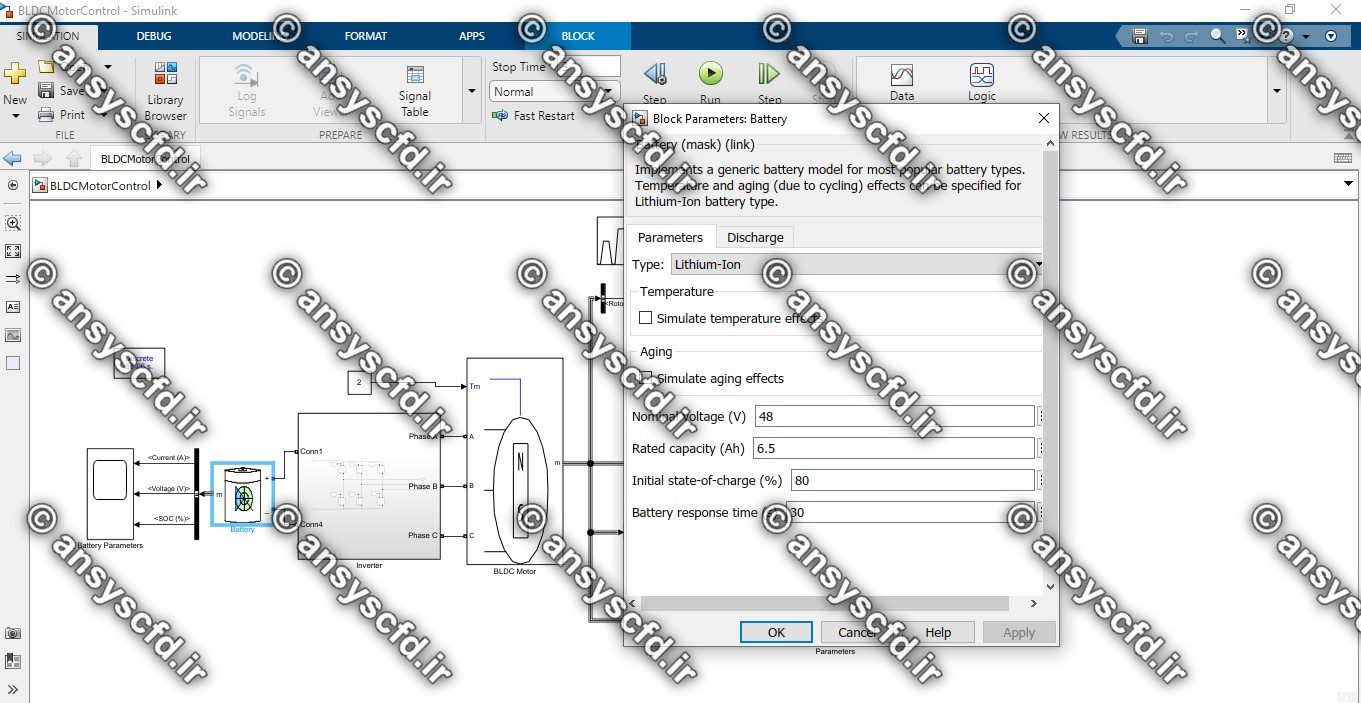
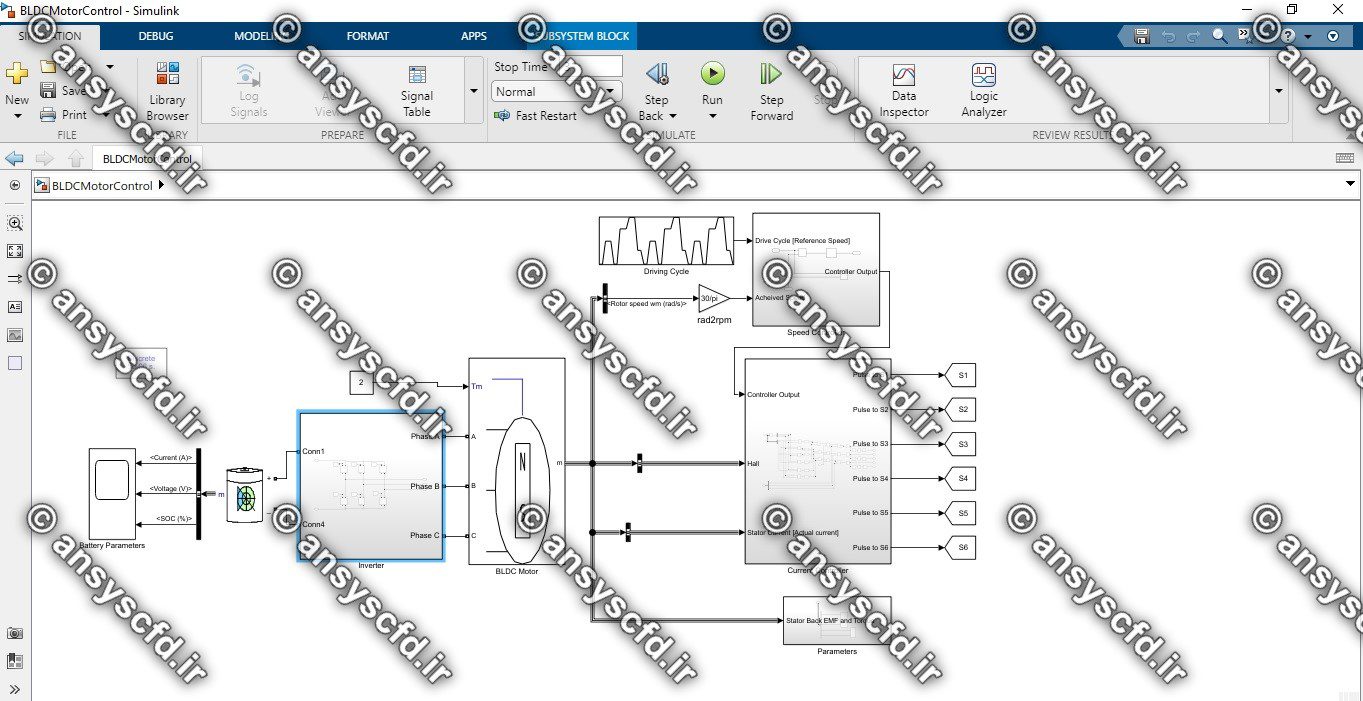
در این پروژه شبیه سازی و سیمولینک متلب کنترل سرعت موتور DC بدون جاروبک(BLDC) همراه اینورتر تغذیه شده توسط باتری انجام شده است.
مدار شبیه سازی موتور BLDC همراه اینورتر تغذیه شده توسط باتری:
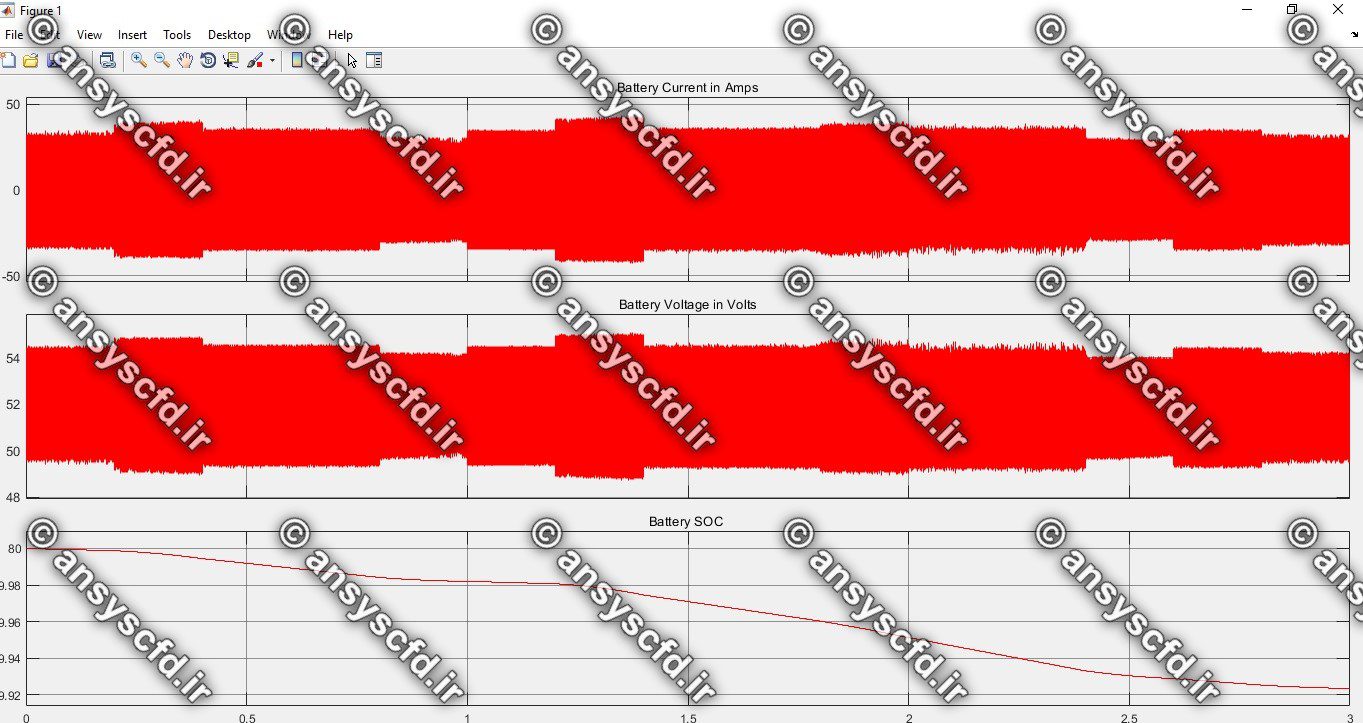
نتایج شبیه سازی:
جریان، ولتاژ و SOC باتری
پارامترهای بلوک موتور BLDC:

بلوک دیاگرام روتور و استاتور:

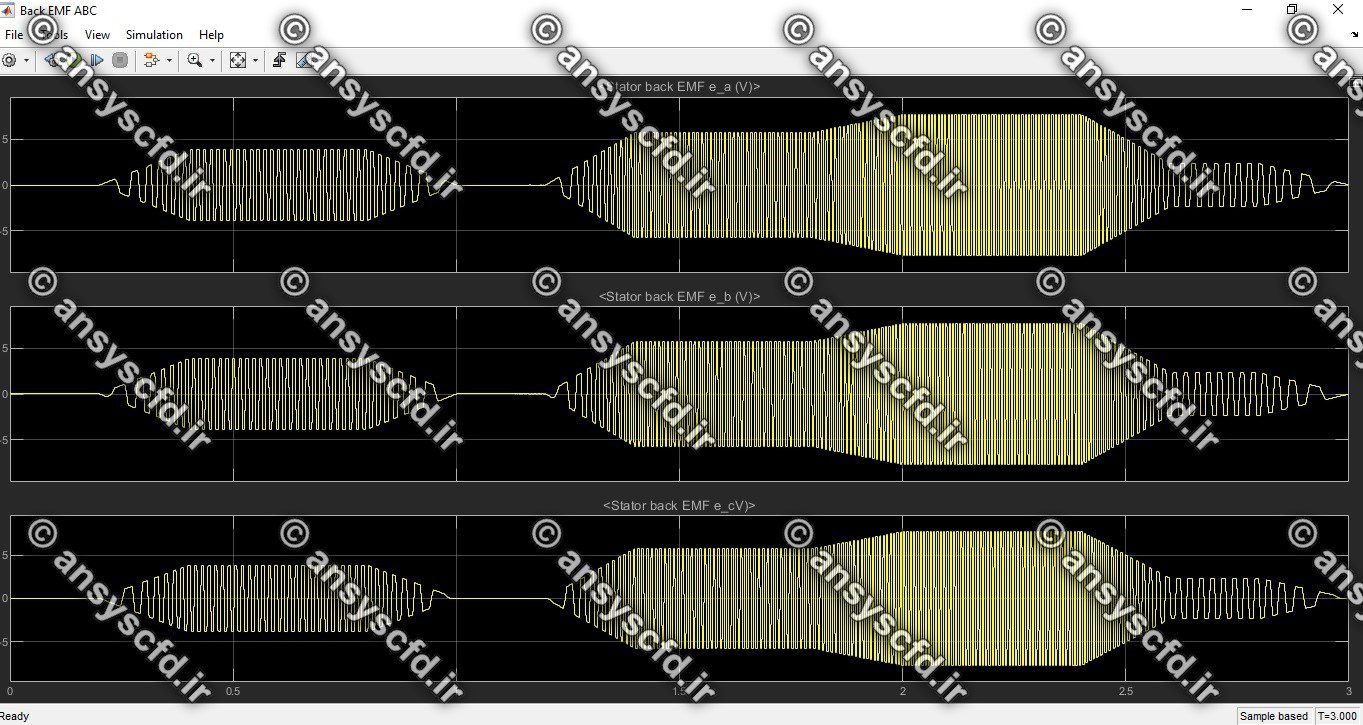
نتایج back-EMF استاتور برای سه فاز:
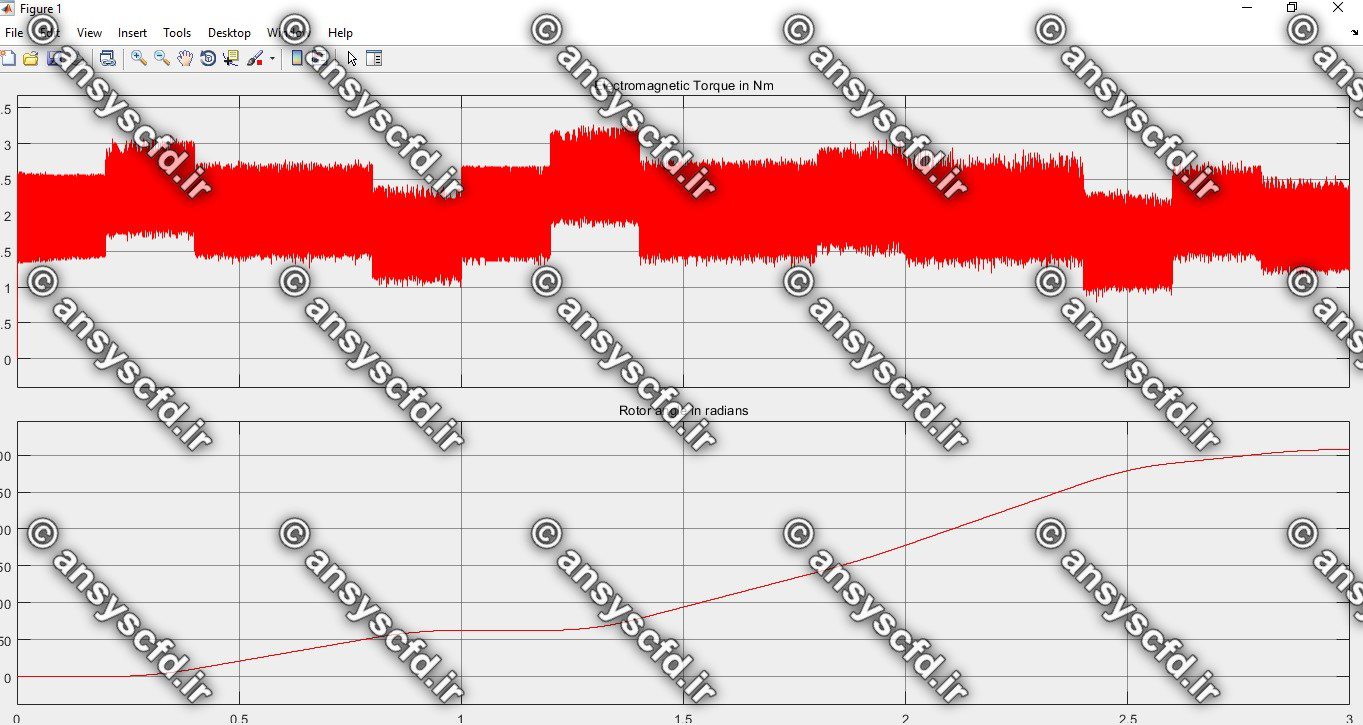
نتایج گشتاور الکترومغناطیسی(نیوتن متر) و زاویه روتور(رادیان):
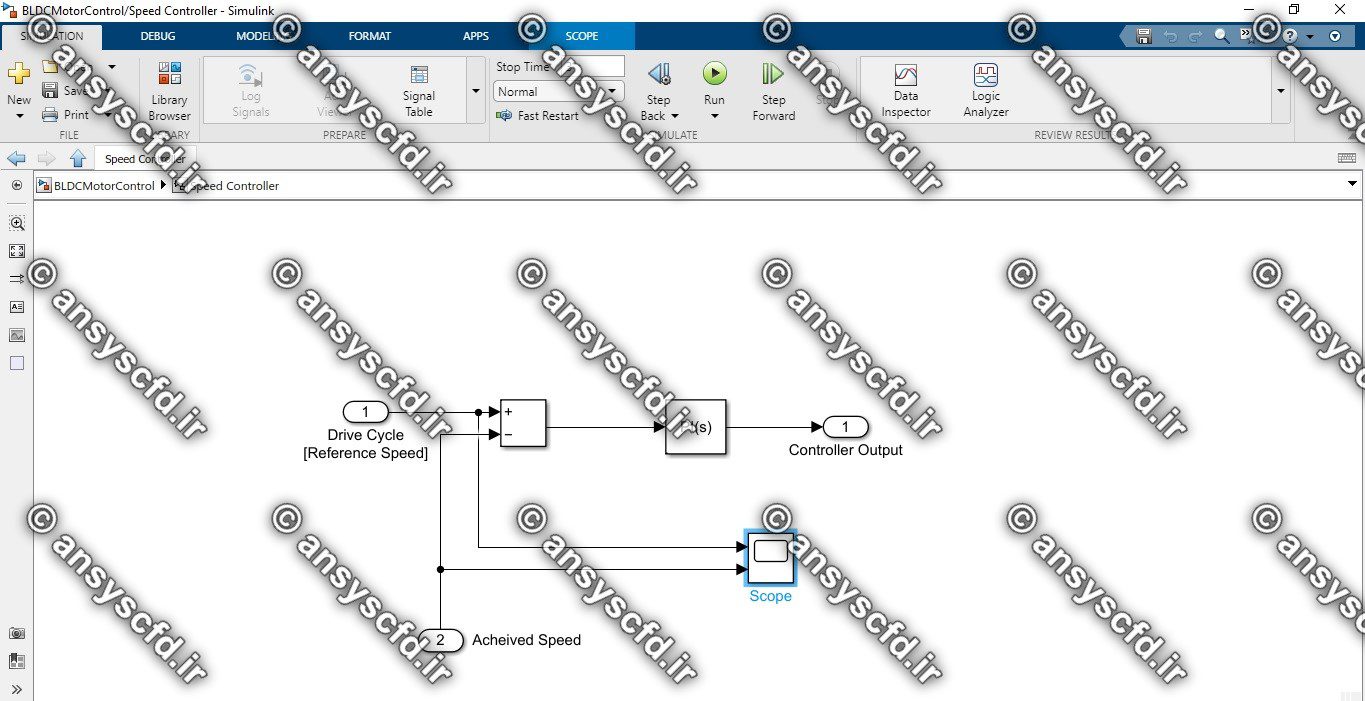
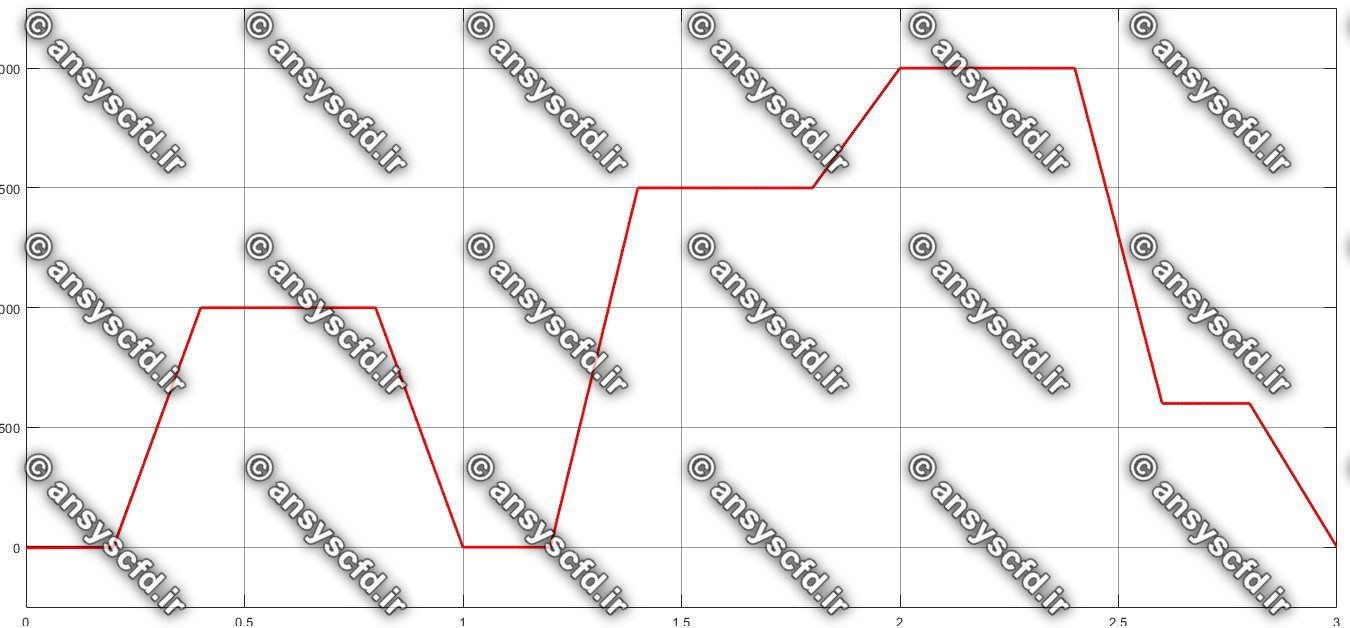
بلوک دیاگرام کنترل کننده سرعت:
مشخصات پارامترهای بلوک باتری: