توضیحات
پروژه شبیه سازی و سیمولینک متلب کنترل سرعت موتور سنکرون رلوکتانسی(SynRM) براساس خطی سازی ورودی- خروجی به روش کنترل برداری(FOC)
موتور سنکرون رلوکتانسی یکی از قدیمی ترین و ساده ترین ماشین های بدون جاروبک AC است. این موتور در مقایسه با موتور القایی به دلیل عدم وجود سیم پیچ روتور، فاقد تلفات روتور می باشد. همچنین در مقایسه با موتور سنکرون سوئیچ رلوکتانسی ریپل گشتاور پایین تر و نویز کمتری دارد.
در چند دهه اخیر موتورهای DC به دلیل کارایی بالا و کنترل آسان، در سطح وسیعی در صنایع مختلف استفاده شده اند. همچنین این نوع درایوها دارای راندمان بالا و دینامیک سریع هستند. اما وجود کموتاتورهای مکانیکی، جارویک ها و هزینه تعمیر و نگهداری آنها باعث گرانی این نوع موتورها در مقایسه با انواع موتورهای AC متعارف شده است. باتوجه به معایب ذاتی درایوهای DC استفاده از درایوهای AC اعم از سنکرون و القایی مورد توجه خاص گرفته است. هرچند که اینگونه درایوها دارای کنترل کننده های پیچیده تر و گرانقیمت تری نسبت به درایوهای DC می باشند.
ماشین SynRm در سال ۱۹۰۰ بوسیله danielsen در سوئد اختراع شد و دلیل این اختراع، بهبود ضریب توان ماشین القایی بود. در آن زمان ماشین، ماشین خود راه انداز سنکرون نامیده میشد. بدلیل توانایی آغاز بکار با جریان خط و قفل کردن سرعت سنکرون با تغيير شكل روتور، آنرا برجسته کردند. پس از مدتی، ماشین نام سنکرون القایی به خود گرفت و توجه بسیاری را جلب کرد و در صنایع ریسندگی مورد استفاده ی بسیاری قرار گرفت. این ماشین بدلیل ناتوانی در تولید روتوری با ضریب برجستگی بالا و درنتیجه کم بودن ضریب توان مورد بی توجهی محققین قرار گرفت؛ تا اواخر دهه ۱۹۸۰ که زمانی بود که ماشین SynRM ، بدون قفس روتور، به عنوان جایگزین برای ماشین القایی مطرح گشت. در این موقع بود که مقاله ای توسط آقای lipo انتشار یافت بنام “ماشین سنکرون رلوکتانسی-یک جایگزین ماندنی برای ماشین القایی”. وی در این مقاله ذکر کرده بود که با توجه به پیشرفت صنعت و توانایی تولید روتور مناسب و کنترل جریان یک چگالی گشتاور مناسب بدست می آید تا موتور القایی را پشت سر گذارد. از آن موقع به بعد، تلاشهای تحقیقی عظیمی بر روی این موتور صورت گرفته که بخش عظیمی از آنها مربوط به بحث بدون حسگر می باشد.
درایورهای سرو، با عملکرد بالا و دقیق در کنترل موقعیت با سرعت، در مصارف صنعتی بسیار مهم هستند. عملکرد، سروموتور، علاوه بر استراتژی کنترلی، به دینامیک موتور نیز بستگی دارد. در دهه های گذشته، ماشین سنکرون مغناطیسی دائم، بخاطر اینرسی کم روتور و بازده بالا نقش بسزایی در کنترل سرو موتوری ایفا کرده است.
به هرحال قیمت بالای مغناطیس دائم ها، محدودیت های دمای عملکرد و خطر برگشت مغناطیسی pM در گشتاورهای گذرای بالا یا در اتصال کوتاه، عملکردش تاحدی محدود شد. اخیرا با بهبود کنترل برداری، علاوه بر استفاده از DSP، باعث سهولت در استراتژی های کنترل پیچیده شد. نه تنها PMSM، بلکه IM، SRM، SynRM، نیز به عنوان درایو، مورد استفاده بیشتر قرار می گرفتند. کنترل برداری ماشین القایی، یک دینامیک سریع، بهمراه یک موتور جان سخت را مهیا می کند. در عین حال، این موتور وابسته به پارامتر بوده ، دارای تلفات بالا و سخت از نظر کنترل پذیری می باشد. جستجو برای یک موتور جان سخت با تلفات کم، نتیجتاً به SRM منتهی شد که با پیشرفت الکترونیک صنعتی امروز و کنترل جریانی موقعیت ، براحتی قابل مقایسه با موتور القایی کنترل شده بوسیله ی کنترل برداری می باشد. بعضی از معایب استفاده ی ضعیف از مواد فعال ، حالت قابل توجه ضربانی گشتاور در سرعتهای بالا ، چگالی پایین گشتاور و مقدار نسبتا پایینKW/KVA می باشد. برای برطرف کردن عیوب بالا، به موتور SynRM روی آورده شد. این موتور، حاوی هیچ سیم پیچی بر روی روتور نمی باشد، بنابراین، تمام جریان ها و تلفات در استاتور و درنتیجه گرما نیز در استاتور تولید میشود. این مهم نیز خنک کردن موتور را ساده کرده و آنرا برای کار در شرایط با محیط گرم، به دلیل توانایی اندازه گیری مستقیم دمای موتور، اضافه بار و.. از طریق بدنه، مناسب می سازد. علاوه بر دلایل مذکور، به دلیل سادگی ساختار و عدم حضور حلقه لغزان و جاروبک، با اتخاذ تدابير مناسب، میتوان استراتژی کنترلی مناسبی بکار برد و کنترل این موتور را دقیقا همانند ماشین DC در واقع ساده تر از ماشینهای AC دیگر در دست گرفت.
متداولترین نوع موتور الکتریکی که امروزه در صنعت استفاده می گردد موتور القایی قفس سنجابی سه فاز چهار قطب می باشد. موتورهای القایی بواسطه راندمان و ضریب قدرت بالا، قیمت پائین، ساختار محكم، قابلیت اطمینان و عمر زیاد و حداقل نیاز به تعمیر و نگهداری، چنین جایگاه برجسته ای یافته اند. سازندگان موتور القایی، در طول سالهای اخیر بکمک پیشرفت علم طراحی ماشین و ظهور مواد با کیفیت بالا، محصولات تولیدی خود را بطور چشمگیری بهبود بخشیده اند. بازار موجود برای استفاده از موتورهای القایی یک مانع جدی در متقاعد ساختن تولید کنندگان جهت تولید سایر موتورها محسوب می شود. اما بعضی خصوصیات ممتاز در موتورهای دیگر، امکان رقابت آنها با موتور القایی را فراهم آورده است. اساسأ درایوهای سرعت متغير القایی دارای دو نقطه ضعف عمده می باشند: ١-تخمین سرعت واقعی روتور بخصوص در سرعتهای پائین با وجود لغزش و عدم وجود برجستگی بر روی روتور عموما دشوار بوده و به یک نمونه بردار سرعت نیاز دارد. بعلاوه، کنترل درايو القایی در سرعتهای خیلی پائین پیچیده می گردد و در پیاده سازی با مشکلات اساسی روبرو می شود. ۲-موتورهای القایی استاندارد به ندرت بر اساس کاربردهای سرعت متغير طراحی بهینه می شوند بلکه بطور نرمال بر مبنای ولتاژ تغذیه سینوسی طراحی و ساخته می گردند. چنانچه یک موتور القایی استاندارد با یک مبدل تغذیه گردد توان خروجی که بطور پیوسته از آن درخواست می شود باید از مقدار نامی کمتر باشد زیرا تلفات اضافی ایجاد شده در موتور ناشی از هارمونیکهای مبدل، دمای داخل موتور را بالا می برد.
بسته به نوع مبدل، نوع مدولاسیون و نحوه طراحی ماشین و با توجه به اطلاعات مندرج در دفترچه های فنی ارائه شده توسط سازندگان، میزان کاهش سطح توان خروجی در فرکانس نامی، بین ۰ تا ۲۰ درصد متغیر است.
امکان کنترل بدون نمونه بردار مکانیکی حتی در سرعت صفر، امکان دستیابی به راندمان بالاتر و یا لااقل برابر با موتورهای القایی پربازده و سرعت چرخش سنکرون از خصوصیات ممتاز موتورهای سنکرون AC مدرن اعم از موتورهای سنکرون مغناطیس دائم نوع روتور داخلی و موتور سنکرون رلوکتانسی با نسبت اندوکتانس بالا در مقایسه با موتور القایی می باشد. استفاده از آهنربای دائم در ماشین های صنعتی سرعت پائین و حذف جعبه دنده، یکی دیگر از این برتری هاست.
روش های کنترل موتور سنکرون رلوکتانسی :
یکی از روش های قدیمی کنترل درایوهای سرعت متغیر AC روش V/F ثابت است. عیب این روش آن است که پاسخ گذرای درایو خیلی کند می باشد و تنها برای درایوهای با دینامیک پایین مناسب است. امروزه باتوجه به محاسن موتور سنکرون رلوکتانسی و نیز پیشرفت هایی که در زمینه طراحی ماشین و الکترونیک قدرت حاصل شده است استفاده از تکنیک های کنترل برداری بر روی این درایوها، مورد توجه محققین و طراحان درایو قرار گرفته است. به طوری که روش های گوناگون امتدادیابی میدان در دستگاه های مرجع دو محوری روتور (d,q) بطور وسیعی در درایوهای سرعت متغیر AC، از جمله درایوهای روتور سنکرون رلوکتانسی مورد استفاده قرار گرفته است.
امروزه مصرف قابل توجه انرژی در سراسر جهان مصرف انرژی الکتریکی می باشد. از طرفی تحقیقات انجام شده نشان می دهد که موتورهای الکتریکی بیشترین سهم را در مصرف انرژی الکتریکی دارند. بنابراین باتوجه به استفاده گسترده از موتورهای الکتریکی تحقیق بر روی موتورهای الکتریکی با بازده بالا بیشتر مورد توجه قرار گرفته است. زیرا استفاده از موتورهای الکتریکی با بازدة بالا موجب کاهش مصرف انرژی و همچنین باعث کاهش اثرات مخرب بر روی محیط زیست می شود. از اینرو، در سال های اخیر علاقه بسیاری به مطالعه بر روی موتورهای سنکرون رلوکتانسی صورت گرفته است که تحقیقات اولیه انجام شده بر روی آن به سال ۱۹۲۳ بر می گردد. استاتور موتورهای سنکرون رلوکتانسی مشابه موتور القایی و موتور سنکرون مغناطیس دائم است، اما ساختار روتور آن به طور قابل توجهی متفاوت است.
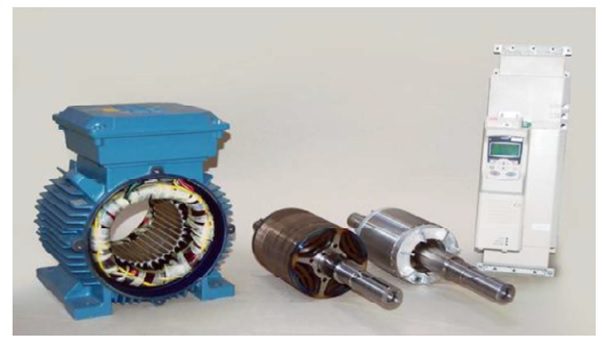
شکل نمونه ای از استاتور و روتور موتور سنکرون رلوکتانسی.
ساختار روتور در موتورهای سنکرون رلوکتانسی به گونه ای است که منجر به ویژگی هایی از جمله تراکم گشتاور و ضریب قدرت بالا می شود. بدین ترتیب بدون استفاده از روتور مغناطیس دائم، موتور سنکرون رلوکتانسی می تواند مزایای موتور سنکرون مغناطیس دائم را با هزینة پایین تر ممکن ساز کند. علاوه بر این، عدم وجود سیم پیچ جریان در روتورهای سنکرون رلوکتانسی موجب صرفه جویی در هزینه، سادگی و عدم وجود تلفات مسی در روتور می شود. از اینرو، گشتاور پیوسته بیشتری را در مقایسه با ماشین القایی با سایز یکسان دارا می باشد. از طرفی عدم وجود تلفات مسی در روتور باعث افزایش بازده میشود. همچنین این امر موجب می شود که موتورهای سنکرون رلوکتانسی در دمای پایین تری کار کنند و طول عمر آن ها افزایش یابد. افزون بر موارد فوق، ساختار شار احاطه شده روی روتور باعث می شود که موتورهای سنکرون رلوکتانسی در کاربردهای تضعیف میدان نیز مناسب باشند.
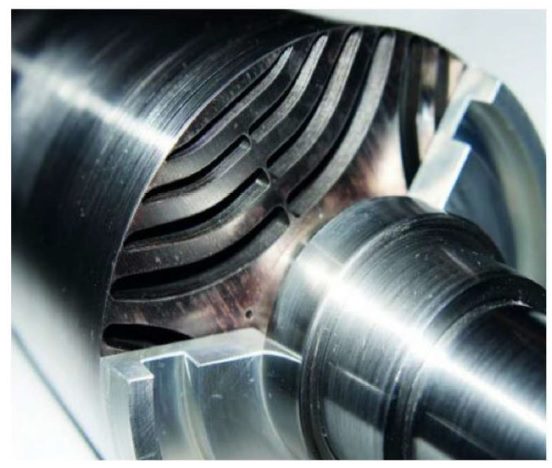
شکل نمونه ای از روتور موتور سنکرون رلوکتانسی.
بنابراین موتور سنکرون رلوکتانسی به خاطر ساختار متفاوت روتور نسبت به سایر موتورها از جمله موتور القایی و موتور مغناطیس دائم ویژگی های قابل توجه ای را به همراه دارد که در بالا مطرح گشت. از طرفی این موتور نیز به مانند سایر موتورها به منظور راه اندازی مناسب، عملکرد بهتر، بازده بیشتر و بهره بردن از ویژگی های آن نیازمند به درایو می باشد تا از طریق یک روش کنترل مناسب این موارد تا حد زیادی محقق شود. در میان روش های کنترل که تا به امروز مطرح شده اند، روش هایFOC و DTC رایجتر می باشند.
شرح پروژه:
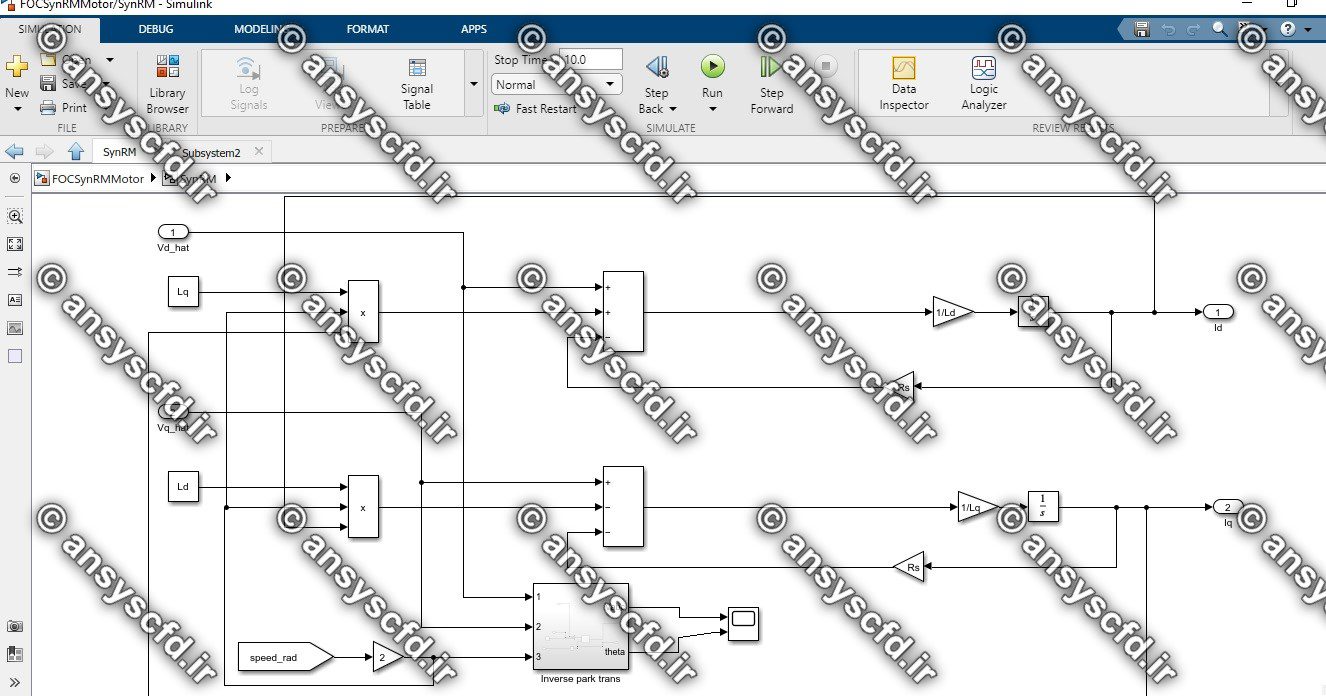
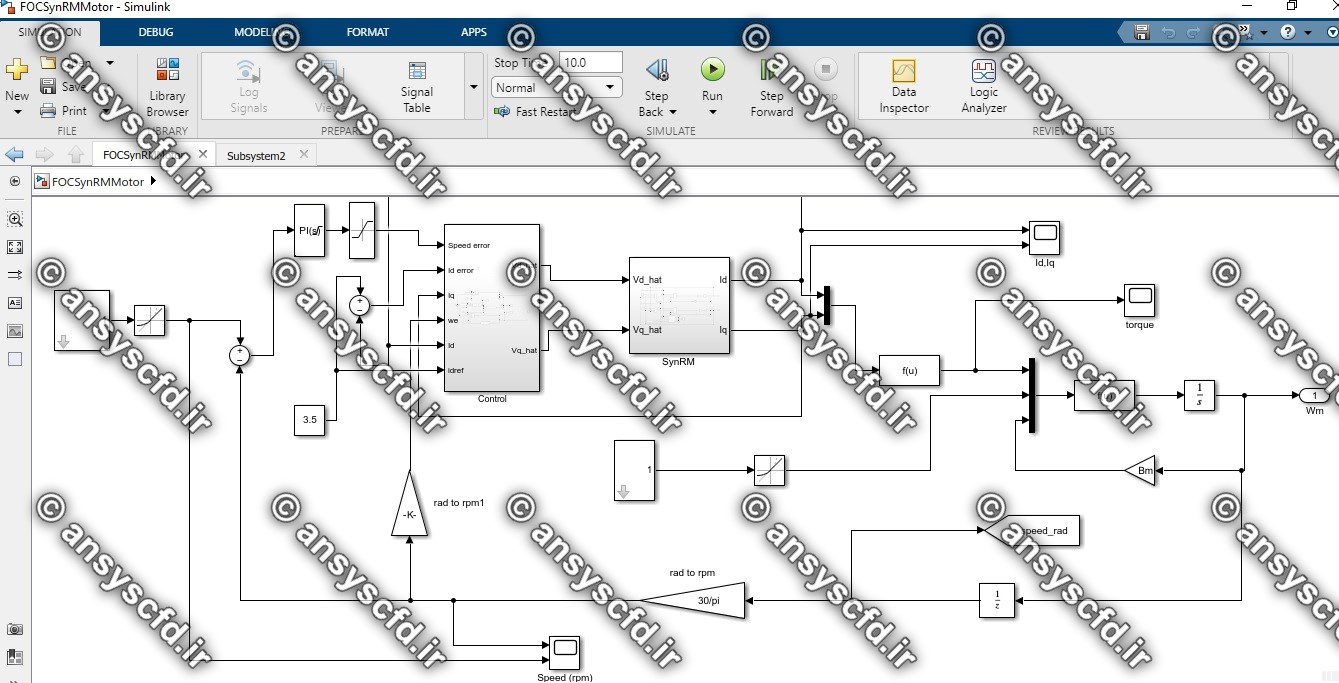
در این پروژه شبیه سازی و سیمولینک متلب کنترل سرعت موتور سنکرون رلوکتانسی(SynRM) براساس خطی سازی ورودی- خروجی به روش کنترل برداری(FOC) انجام شده است.
بلوک موتور سنکرون رلوکتانسی:
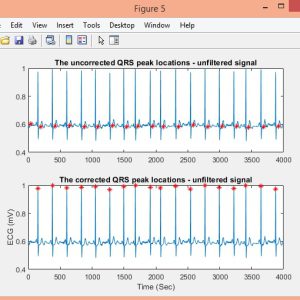
نتایج شبیه سازی:
نتایج سرعت:
نتایج گشتاور:

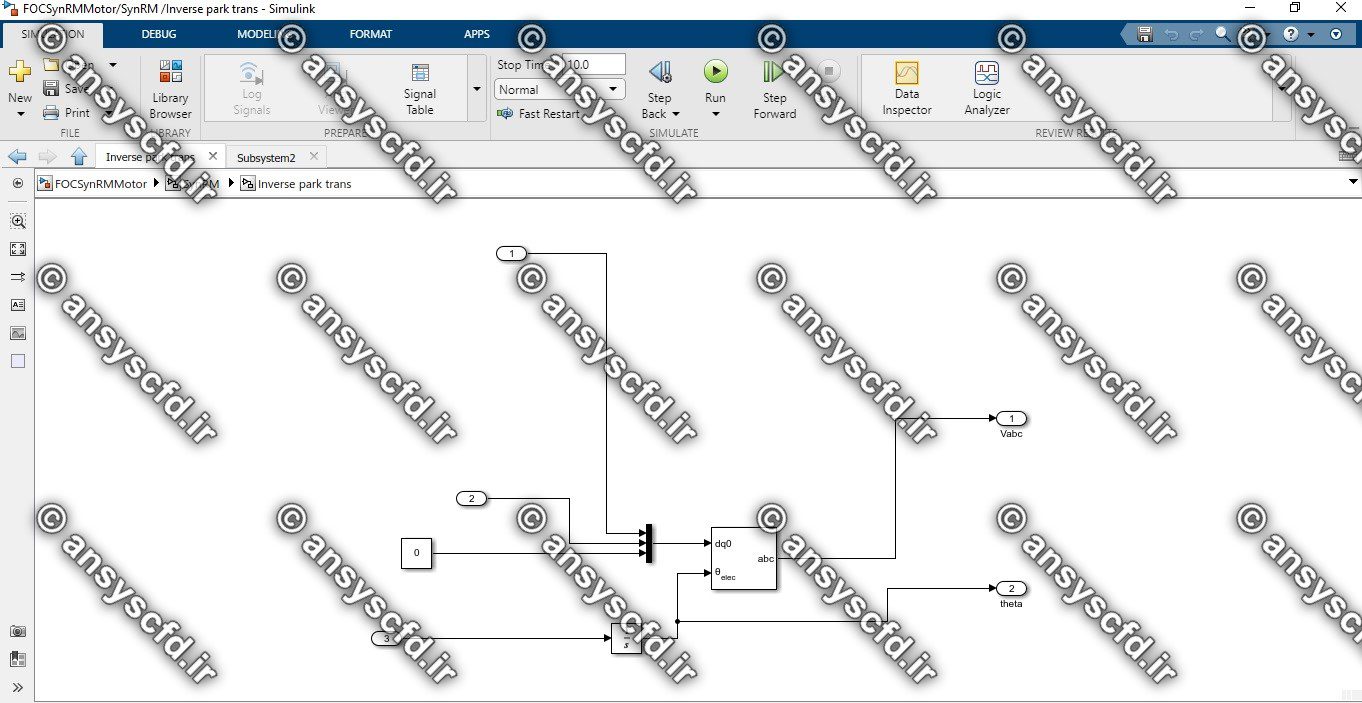
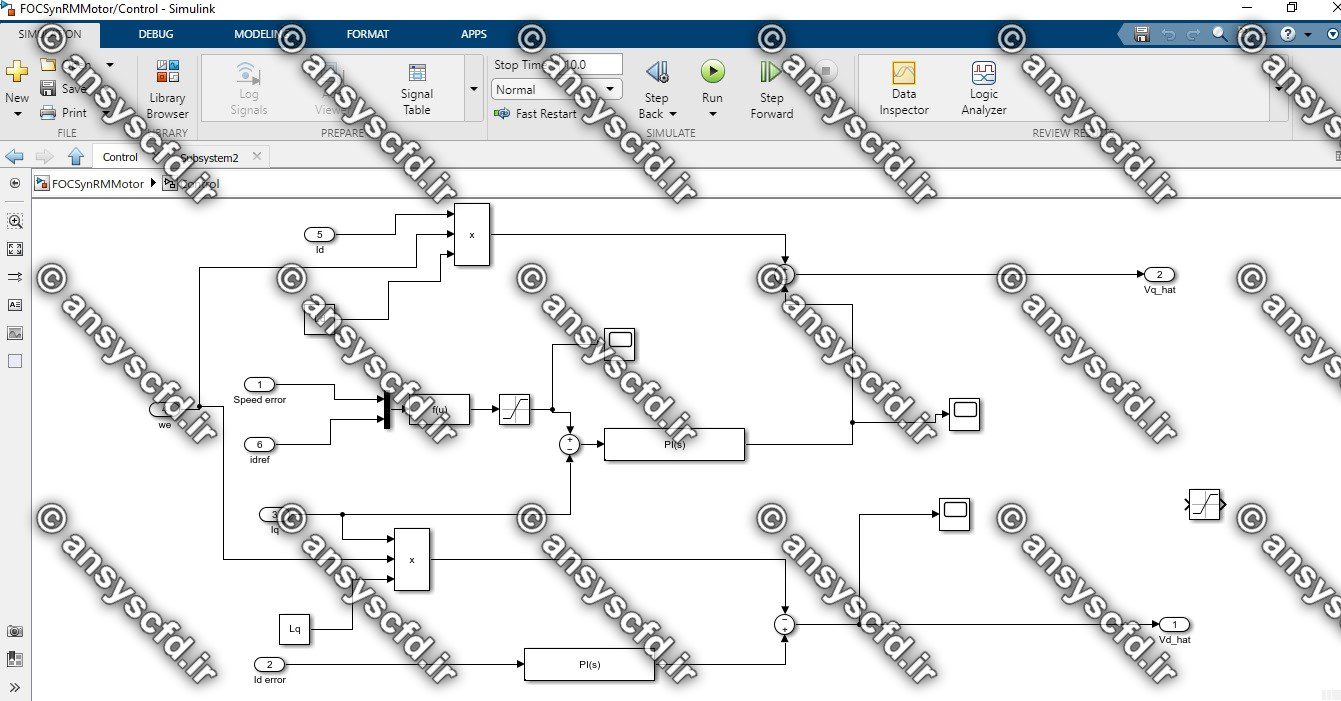
سایر بلوک ها: