توضیحات
ترجمه مقاله برق کنترل بدون حسگر موتور سنکرون مغناطیس دائم(PMSM)
عنوان انگلیسی مقاله:
Sensor-less Control of Permanent Magnet Synchronous Motor
عنوان فارسی مقاله:
کنترل بدون حسگر موتور سنکرون مغناطیس دائم(PMSM)
سال انتشار مقاله: 2019
ناشر: IEEE
ترجمه چکیده مقاله:
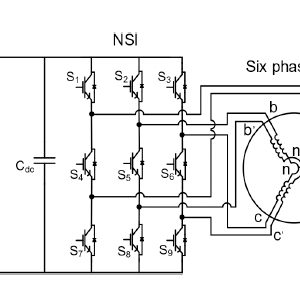
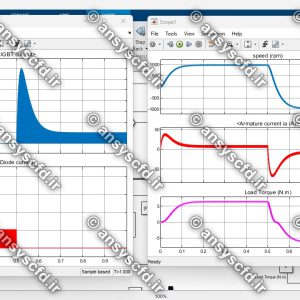
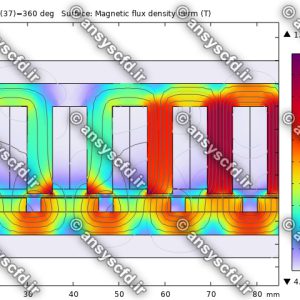
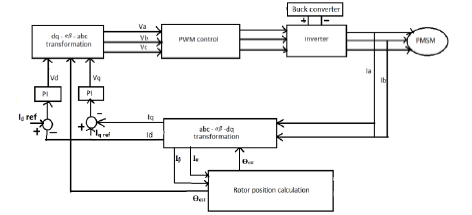
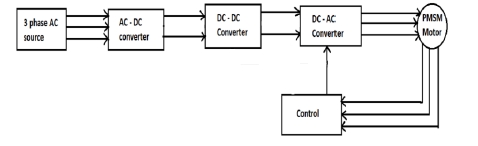
برای کنترل موتور سنکرون مغناطیس دائم(PMSM)، حسگرها مورد نیاز هستند که موقعیت روتور و سرعت موتور را تعیین می کنند. این حسگرها یا سنسورها سبب افزایش هزینه و فضای بیشتر موتور می شوند، بطوریکه استفاده از حسگرها را در کاربردهای صنعتی محدود می سازد. لذا تکنیک کنترل برداری بدون حسگر برای موتور سنکرون مغناطیس دائم در این مطالعه بکارگرفته شده است. در این روش از تبدیل کلارک و پارک به منظور کنترل موتور استفاده شده است. در این مطالعه روش تعیین موقعیت روتور برمبنای نیروی محرکه الکتریکی معکوس یا به اختصار EMF معکوس برای تعیین موقعیت روتور بکارگرفته شده است. روش کنترل برداری براساس کنترل جهت دهی میدان(FOC) موتور را کنترل می کند. نتایج نشان می دهند که کنترل برداری بدون حسگر برای کنترل موتور سنکرون مغناطیس دائم، باعث کاهش هزینه و بالابردن قابلیت اطمینان می شود. روش کنترل برداری حلقه بسته بدون حسگر موتور سنکرون مغناطیس دائم در نرم افزار سیمولینک پیاده سازی و شبیه سازی شده است. کنترل برداری همراه با تعیین موقعیت روتور با بکارگیری الگوریتم EMF معکوس در سیمولینک متلب شبیه سازی شده است. بلوک های شبیه سازی شامل تبدیل های مختلف، مبدل ها، و الگوریتم EMF معکوس می باشند. سرعت یا دور موتور، جریان استاتور سه فاز و موقعیت روتور در نتایج نمایش داده شده اند. در ابتدا موتور در حالت حلقه باز عمل می کند و بعد از کسری از ثانیه کنترل حلقه بسته اعمال می شود. روش تعیین موقعیت روتور مبتنی بر EMF معکوس باعث کاهش زمان و هزینه و اجرای آسان می گردد. همچنین روش تعیین موقعیت روتور مبتنی بر الگوریتم EMF معکوس سبب حذف انکودرها و ریسولورها که در صنایع برای تعیین موقعیت استفاده می شوند خواهد گردید.
کلید واژگان: موتور سنکرون مغناطیس دائم(PMSM)، کنترل بدون حسگر، مشاهده گر حالت لغزشی، موتور سنکرون مغناطیس دائم شش فاز، موتور سنکرون آهنربای دائم، کنترل برداری، مدولاسیون بردار فضایی، تعیین موقعیت بدون حسگر، حذف هارمونیک سوم، محرکه الکتریکی پنج فاز، ماشین های سنکرون مغناطیس دائم، سیستم مشاهده گر بدون حسگر، کاهش ریپل گشتاور، کاهش تلفات هارمونیک روتور، کنترل موتور با روش کنترل برداری میدان گرا (FOC)، کلیدزنی اینورتر، روش مدولاسیون بردار فضایی(SVPWM)، تجزیه فضای برداری، مقایسه گر شار و مقایسه گر گشتاور، اختلاف زاویه بین دو سیم پیچ در موتور سنکرون مغناطیس دائم، مدولاسیون موتورهای سنکرون مغناطیس دائم، روش تخمین موقعیت یا سرعت، جریان استاتور، ماشین الکتریکی، ماشین مغناطیس دائم، موتور القایی، کنترل مستقیم گشتاور، مبدل نه سوئیچه، اینورتر منبع ولتاژ(VSI)، اینورتر منبع ولتاژ دو سطحی، اینورتر نقطه خنثی، نول یا اتصال خنثی، آرایش نول، حلقه قفل شده فاز، موتور سنکرون با آهنربای دائم نصب شده بر روی سطح، موتور سنکرون مغناطیس دائم با آهنربای نصب شده در داخل، نیروی محرکه الکتریکی معکوس(back EMF)، کنترل جهت دهی میدان(FOC)، ولتاژ لینک DC، ولتاژ اتصال مستقیم اینورتر، پیاده سازی کنترل برداری بدون حسگر موتور سنکرون.