توضیحات
پروژه شبیه سازی موتور BLDC مغناطیس دائم بدون جاروبک برای خودروی خورشیدی و هیبریدی در نرم افزار انسیس مکسول ANSYS Maxwell
Design and Analysis of Permanent Magnet Brushless DC Motor for Solar Vehicle using ANSYS Maxwell
موتورهای جریان مستقیم:
در میان بازار انبوه موتورهای الکتریکی، موتورهای جریان مستقیما بیش از ۱۴۰ سال است که در صنعت مورد استفاده قرار می گیرند. با وجود پیداش موتورهای جریان متناوب و کاهش سهم بازار موتورهای جریان مستقیم، این موتورها به دلیل مزایا و خواص منحصر به فردشان همچنان در خیلی از کاربردها مورد استفاده قرار می گیرند. در هر کاربردی که نیازمند گشتاور راه اندازی بالایی بوده و با ترمزگیری سریع و تغییر جهت ناگهانی مواجه می باشد موتورهای جریان مستقیم انتخاب خوبی خواهند بود. موتورهای جریان مستقیم یا DC ابزاری برای تبدیل انرژی الکتریکی به انرژی مکانیکی می باشند. از موتورهای DC به طور وسیعی در حوزه های مختلف مهندسی به دلیل ساختار ساده، کنترل سرعت آسان و قیمت مناسب آنها استفاده میشود. به منظور کنترل گشتاور، سرعت و موقعیت موتورهای جریان مستقیم استفاده از درایور و سرودرایور امری اجتناب ناپذیر می باشد. درایور فرامین حرکتی از سمت کنترل کننده مرکزی را دریافت کرده و پس از تفسیر و تبدیل مناسب، آنها را به موتور اعمال می نماید. سرودرایور علاوه بر انجام وظایف مربوط به درایور قادر است فیدبکهای مناسب را از سمت موتور دریافت کرده و متناسب با فرامین دریافتی از سمت کنترل کننده مرکزی گشتاور، سرعت و موقعیت موتور را کنترل نماید. به منظور کنترل گشتاور، سرعت و موقعیت موتور DC بایستی پارامترهای کنترل کننده های گشتاور، سرعت و موقعیت به درستی تنظیم شوند. تنظیم دستی این پارامترها کاری سخت و طاقت فرسا بوده و نیازمند دانش تجربی بالایی می باشد. معمولا موتور DC مغناطیس دائم با یک مدل خطی مرتبه در بیان میشود که در آن از اصطکاک کولمب صرف نظر شده است. متاسفانه اصطکاک کولمب باعث رفتار غیر خطی موتور DC می گردد که این رفتار باعث کاهش کارایی سیستم کنترلی می شود. این امر در مواقعی که موتور DC بایستی در محدوده وسیعی از جمله سرعت های زاویه ای پایین کار کند بسیار قابل توجه است.
ماشین آهنربای دائم:
توسعه ماشین های سنکرون آهنربای دائم از زمان اختراع مواد مغناطیس دائم با کیفیت بالای نئودیوم – آهن بور در سال ۱۹۸۳ شروع گشته است. ماشین های آهنربای دائم بدون جاروبک بدلیل تحریک آهنربای دائم بازدهی بالایی داشته و بطور گسترده در کاربردهای مختلف خانگی و صنعتی در حال استفاده می باشند. ماشین های آهنربای دائم بدون جاروبک به دو دسته ماشین آهنربای دائم بدون جاروبک با جریان مستقیم (BLDC) و ماشین آهنربا دائم بدون جاروبک با جریان متناوب (BLAC که به آن PMSM نیز می گویند) تقسیم می گردد.
ویژگی های موتور BLDC:
موتور BLDC اساسا دارای ساختار مشابه یک مغناطیس دائم دوار همراه با یک مجموعه از هادی های حامل جریان می باشد. از این نظر، مشابه با یک موتور کموتاتور DC معکوس شده نیز می باشد که مغناطیس میچرخد اما هادی های جریان ایستا باقی می مانند. در هر دو حالت برای ثابت ماندن جهت گشتاور در یک جهت، جریان در هادی ها می بایست در هر زمان که یک قطب مغناطیسی از روبروی آن عبور می کند، پلاریته اش نیز عکس شود. در یک موتور کموتاتور DC معکوس شدن پلاریته با کموتاتور و جاروبک انجام می شود. چون کموتاتور نسبت به روتور ثابت می باشد، لحظات سوئیچینگ بطور اتوماتیک با تغییر پلاریته میدان مغناطیس هادیها سنکرون می گردد. در یک موتور BLDC، معکوس شدن پلاریته با کلیدزنی ادوات الکترونیک قدرت انجام می گردد. پروسه کموتاسیون در هر دو نوع ماشین، شبیه به هم بوده و سنکرون با وضعیت روتور میباشد و لذا معادلات دینامیکی مربوطه و مشخصات سرعت-گشتاور آنها یکسان می باشد.
موتورهای BLDC مغناطیس دائم که در صنایع اتومبیل سازی و هوافضا مورد استفاده قرار می گیرند دارای مزایای زیر می باشند:
-نویز پایین بدلیل عدم نیاز به هیچ گونه جاروبک مکانیکی یا حلقه های لغزان در موتورهای آهنربای دائم
-تمام نویزهای مکانیکی به استثنای نویزهای مربوط به بلبرینگ ها، کوپلینگها، و بار حذف می شوند.
-بهره بالا: موتورهای آهنربای دائم بواسطه ی وجود مغناطیس دائم که میدانی پیوسته و ثابت را تولید می کنند و مصرف توان الکتریکی ندارند از بهره بالایی برخوردارند
-هزینه نگهداری کم و طول عمر بیش تر
سهولت کنترل: در موتور BLDC، گشتاور خروجی متناسب با جریان موتور است که درنتیجه عمل کنترل به راحتی انجام می گردد.
-ساختار مجتمع و متراکم: کاربردهای هوافضا و اتومبیل نیاز به تجهیزات با وزن کمتر و حجم کوچکتری دارند تا بهره سوخت مصرفی را افزایش دهند و لذا نیاز به ذخیره سازی انرژی کمتری داشته باشند.
انواع موتور الکتریکی:
انواع مختلف ماشین های الکتریکی که تاکنون در صنعت حمل و نقل الکتریکی و هیبریدی استفاده شده اند را میتوان به دو دسته با جاروبک و بی جاروبک تقسیم کرد که شامل 4 نوع موتور جریان مستقیم(DCM)، موتور القایی(IM)، موتور سوئیچ رلوکتانس(SRM) و موتور با آهنربای دائم بدون جاروبک(PMSM) می باشد.
موتور جریان مستقیم:
موتور جریان مستقیم به علت مناسب بودن مشخصه گشتاور سرعتی که دارد، برای استفاده در کاربردهای کششی مورد توجه قرار گرفته است. این نوع موتور انتخاب طبیعی می باشد چرا که ارزان ساخته می شوند، اجزای آنها به سادگی در دسترس می باشد و چون مستقیما از باتری تغذیه می شود مدار کنترل ساده ای دارد. از نظر عملکرد، گشتاور راه انداز بالایی دارد. تنظیمات ساده و اتصال مستقیم به باتری، بدون نیاز به سیستم الکترونیکی پیچیده دیگر مزیت این موتورهاست. ولی معایب این نوع موتور از جمله حجم زیاد، بازدهی کم، استفاده از جاروبک و کموتاتور یا حلقه های لغزان در آن، قابلیت اطمینان کم و نیاز به تعمیرات می باشد.
موتور جریان مستقیم برای توان های بیشتر از ۲۰ کیلووات به قطب های کمکی و سیم بندی های جبرانگر نیاز دارد که باعث افزایش حجم و هزینه می شود. تلفات این موتور در بخش رتور زیاد بوده و علاوه بر کاهش بازدهی آن، تعبیهی سیستم خنک کاری باعث افزایش حجم و هزینه می شود. ماشین جریان مستقیم دو نوع با آهنربای دائم و با سیم بندی میدان دارد. مزایای هر دو سادگی کنترل، نتظیم سرعت خوب، راه اندازی، ترمز و معکوس شدن سریع است. نوع سیم بندی شده ی آن چگالی توان کمی دارد، و نیز کموتاتور باعث ایجاد ریپل گشتاور شده و سرعت ماشین را محدود می کند، جاروبک نیز باعث اصطکاک و تداخل امواج رادیویی می شود و نویز ایجاد میکند و نیاز به تعمیرات مداوم دارد. این موارد باعث کم شدن قابلیت اطمینان این موتور می شوند.
برای افزایش چگالی توان میتوان از آهنربای دائم استفاده کرد ولی در این صورت قابلیت تضعیف میدان از بین می رود و میدان الکترومغناطیسی قابل کنترل نیست اما چگالی توان بالاتر، کاهش تلفات مسی و بازدهی بالاتر و کاهش ابعاد با استفاده از آهنربا به جای سیم بندی مزایای آن هستند. با پیشرفت الکترونیک و کنترل دیجیتال و میکروپروسسورها موتورهای پیشرفته تر جایگزین این موتورها شدند. با وجود معایبی که گفته شد و نیز توسعه ی نیمه هادی های قدرت، موتور های AC القایی و سنکرون جایگزین موتورهای DC در کاربرد های کششی شدند. دلیل عمده ی این جایگزینی، استفاده از کموتاتور و قابلیت اطمینان کم و نیاز به تعمیرات زیاد موتورهای جریان مستقیم بوده است. با این وجود به دلیل هزینه های ناشی از به کارگیری اینورتر برای درایوهای AC ، این موتورها فقط برای کاربردهای توان بالا کاربردی هستند. در توان های پایین موتور DC به علت سادگی در کنترل کاربردی تر می باشد چرا که توسعه یا باز مهندسی خودروهای بنزین سوز بدون نیاز به اعمال تغییرات مکانیکی با یک موتور DC به سادگی امکان پذیر است.
نرم افزار Maxwell ANSYS
نرم افزار Maxwell ANSYS نرم افزاری کاربردی جهت طراحی، شبیه سازی و آنالیز مدارهای مغناطیسی و الکترومغناطیسی نظیر انواع موتور، ژنراتور و ترانسفورماتور می باشد. یکی از امکاناتی که این نرم افزار جهت شبیه سازی در دسترس قرار داده است محیط RMxprt می باشد. در این محیط به صورت پیش فرض موتورها و ژنراتورهای معمول قابل اتخاب هستند و بنا به طراحی انجام شده می توان تغییرات لازم را در آنها ایجاد کرد.
انواع ماشین قابل طراحی در محیط RMxprt:
1-Adjust-Speed Synchronous Machine
2-Brushless Permanent-Magnet DC Motor
3-Claw-Pole Alternator
4-DC Machine
5-Generic Rotating Machine
6-Line-Start Permanent-Magnet Synchronous Motor
7-Permanent Magnet DC Motor
8-Single-Phase Induction Motor
9-Switched Reluctance Motor
10-Three-Phase Induction Motor
11-Three-Phase Non-Salient Synchronous Machine
12-Three-Phase Synchronous Machine
13-Universal Motor
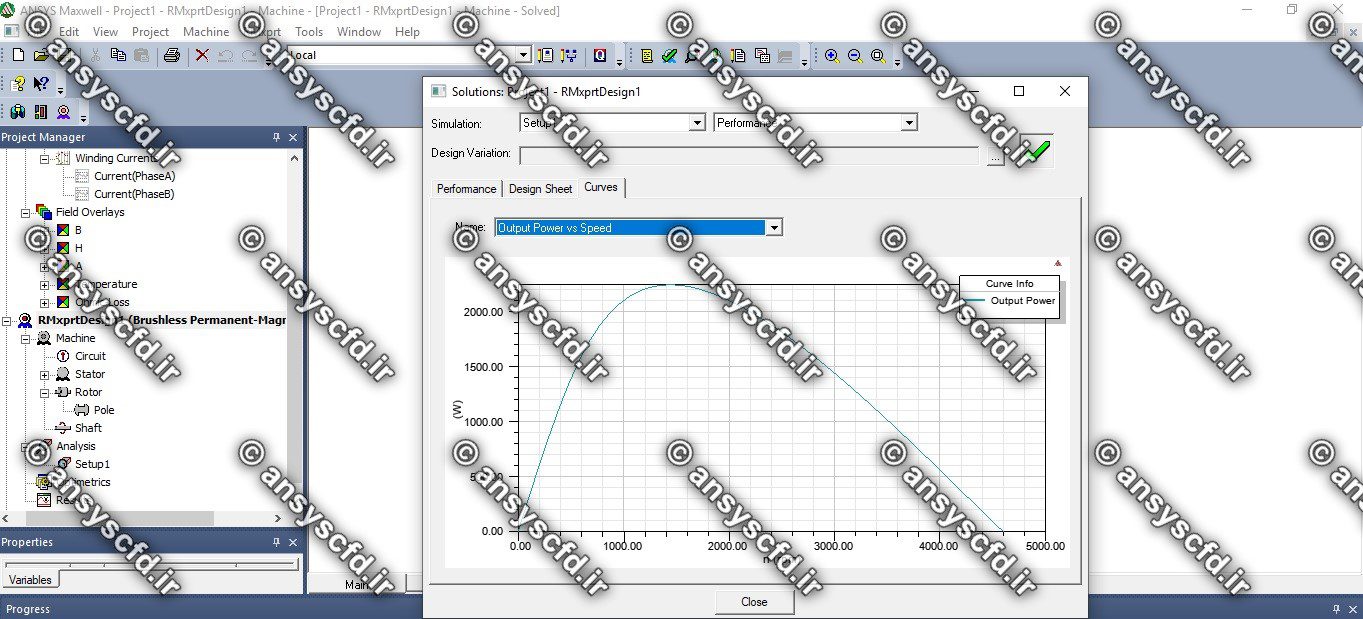
بعد از انتخاب تیپ موتور مورد نظر، اطلاعات مربوط به طراحی که صورت گرفته برای هر قسمت از موتور که در پنجره Project Manager مشخص شده را مقداردهی کرده و بعد از اعتبارسنجی طراحی صورت گرفته با استفاده از گزینه Validate، می توان به آنالیز مدل اولیه موتور پرداخت.
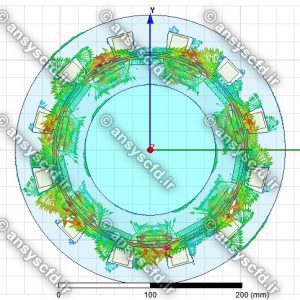
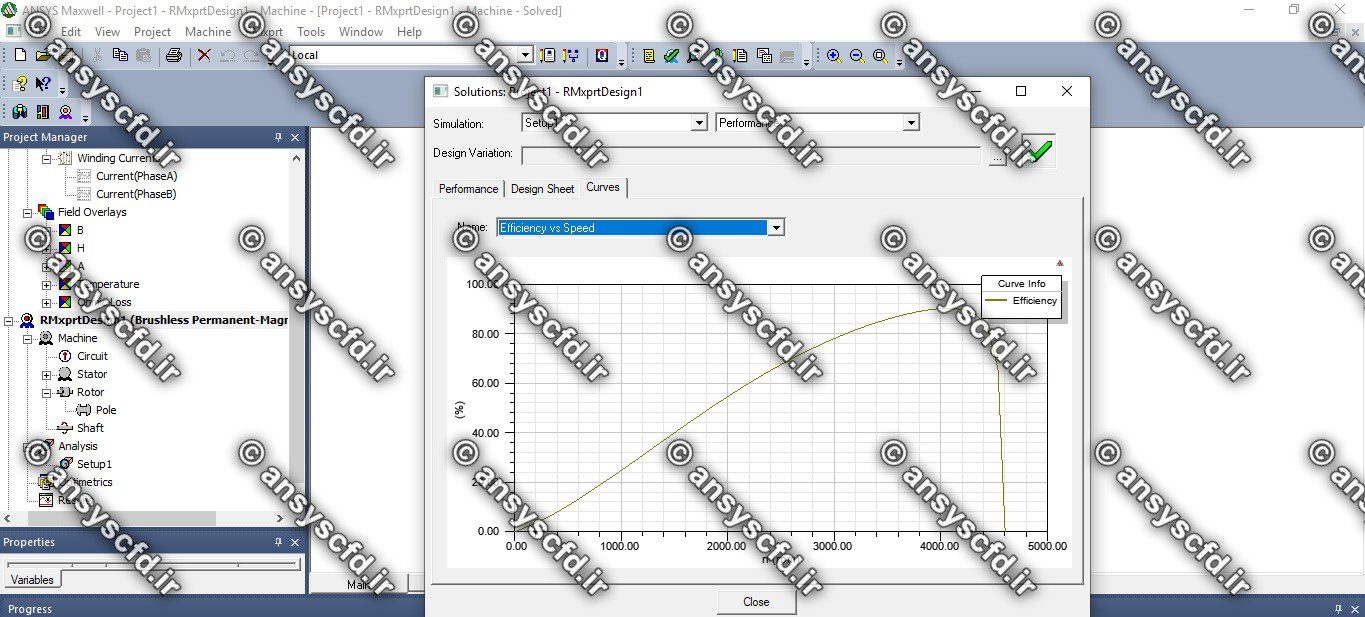
نتایج مربوط به تمامی بخش های طراحی صورت گرفته در این مرحله از طریق پنجره Solution قابل مشاهده می باشد. در صورت رضایت از نتایج به دست آمده می توان مدل دو بعدی و سه بعدی ماشین مورد نظر را از طریق نرم افزار تولید کرد و نتایج گرافیکی از جمله خطوط شار و شدت میدان مغناطیسی را در ماشین مورد نظر ملاحظه نمود.
شرح پروژه:
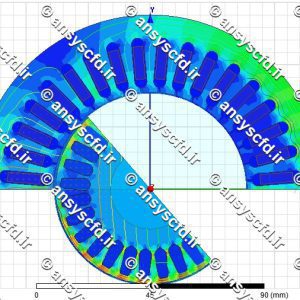
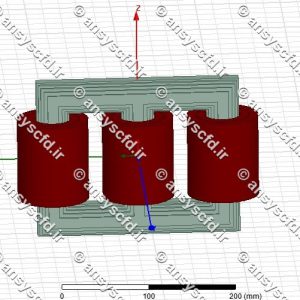
در این پروژه شبیه سازی موتور BLDC مغناطیس دائم بدون جاروبک برای خودروی خورشیدی و هیبریدی در نرم افزار انسیس مکسول ANSYS Maxwell انجام شده است.
مدل موتور BLDC :

مدل استاتور:
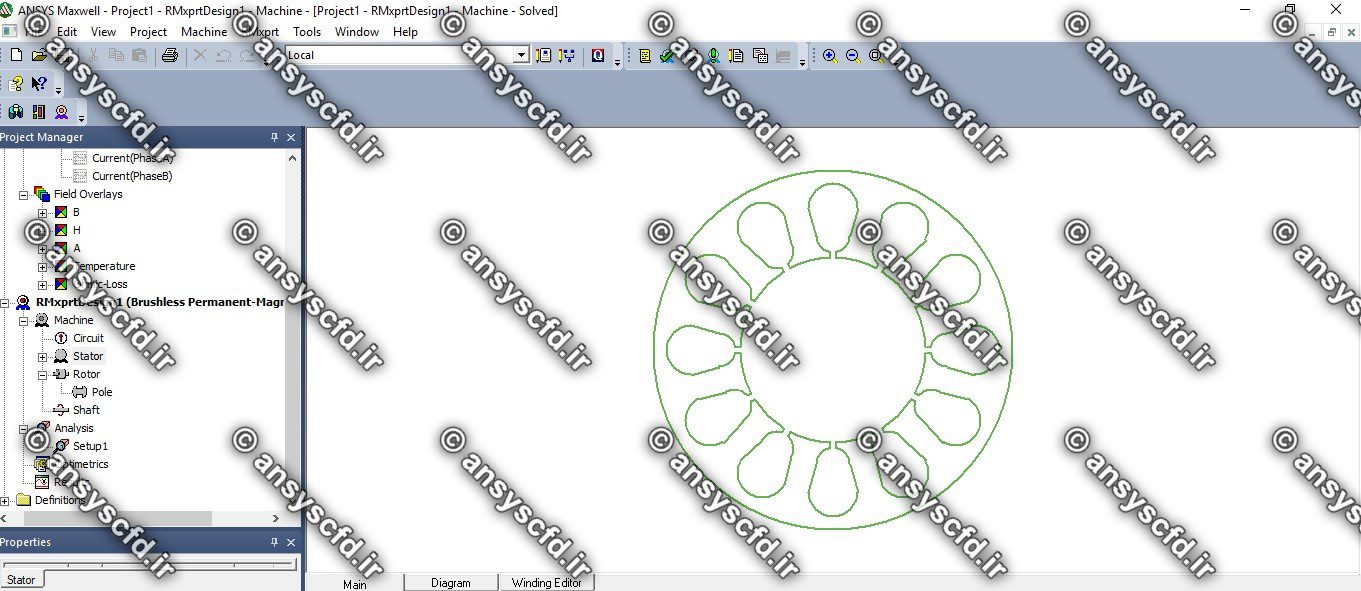
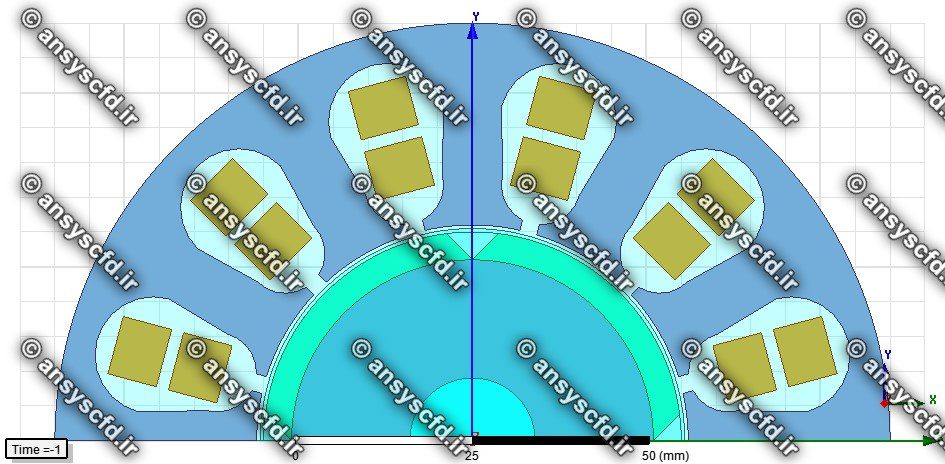
مدل روتور:

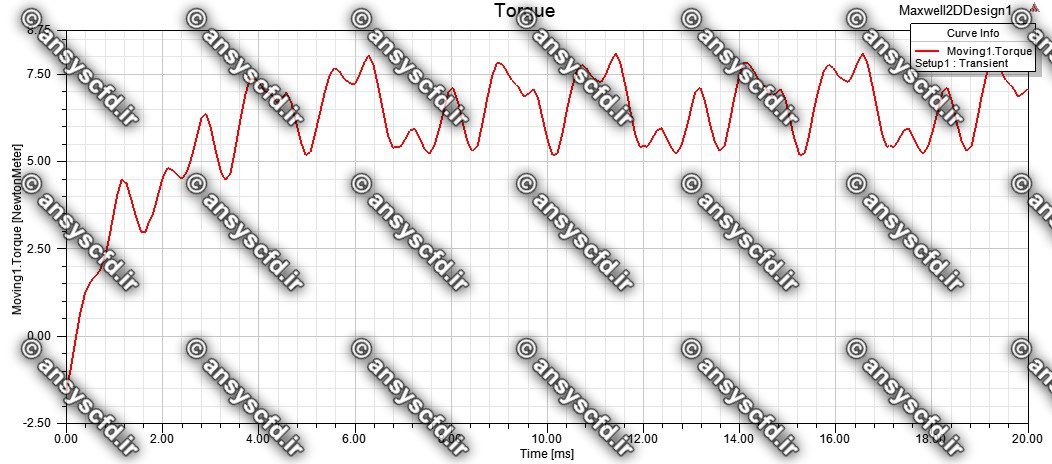
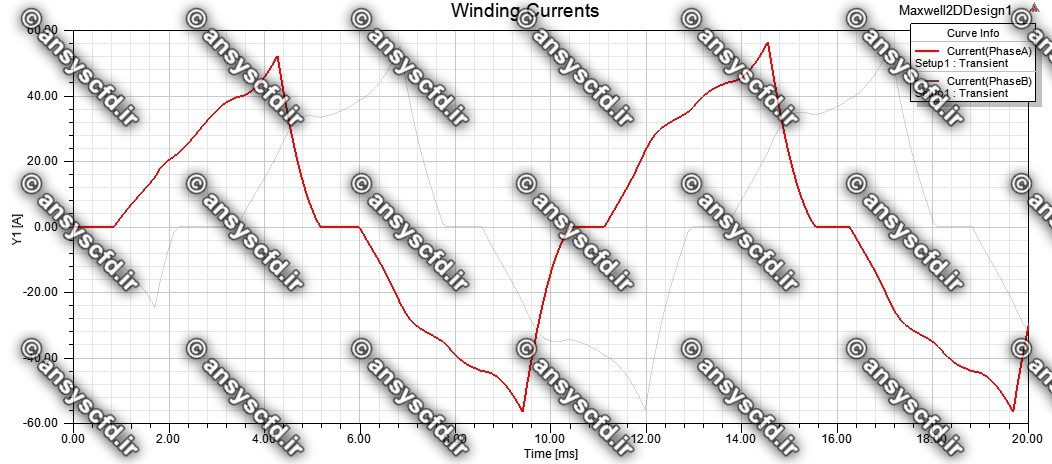
منحنی های عملکرد موتور BLDC:

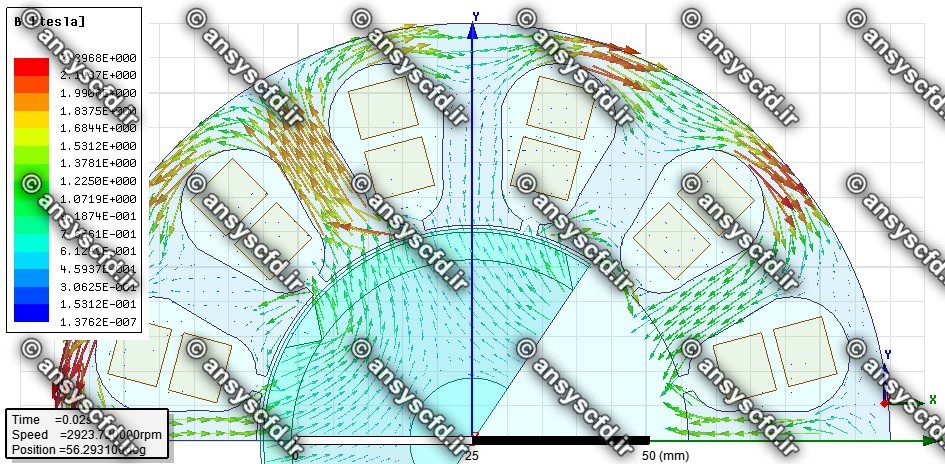
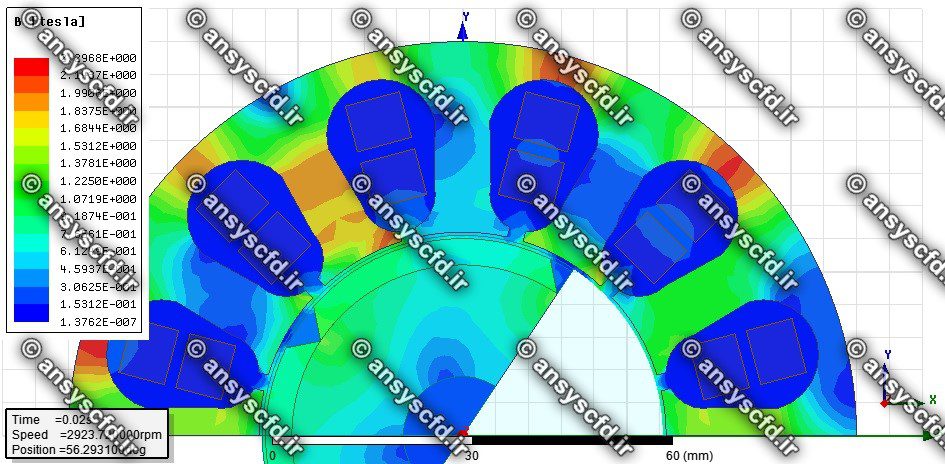
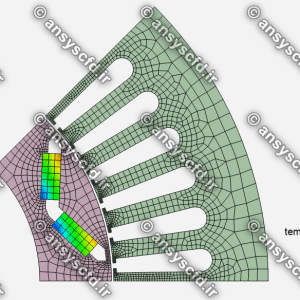
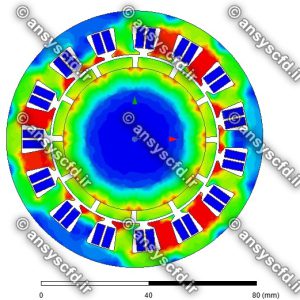
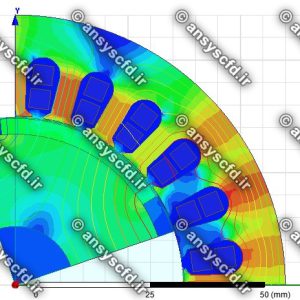
شبیه سازی دوبعدی موتور BLDC:
نتایج شبیه سازی: