توضیحات
پروژه شبیه سازی میکروعملگر حرارتی در نرم افزار کامسول
Simulation of Thermal Microactuator in COMSOL
سیستم های میکروالکترومکانیکی(MEMS):
سیستم های میکروالکترومکانیکی یا به اختصار MEMS زیرسیستم های پیشرفته ای هستند که توسط ماشینکاری سیلیکون ساخته می شوند. سنسورها و عملگرهای میکرونی در چند دهه گذشته صنایع میکروالکترومکانیکی را به طرز چشمگیری متحول ساخته اند، بنابراین بسیاری از محققین در دنیای امروز این سیستم ها را مورد تحلیل و بررسی قرار داده اند. امروزه با پیشرفت علوم، کار در ابعاد کوچک اهمیت فراوان یافته است.
میکروگریپر(Microgripper):
باتوجه به نیاز بشر به کار کردن در ابعاد بسیار کوچک مانند میکرو، کاربردهای فراوانی در این زمینه مانند پزشکی(به عنوان مثال گرفتن یک مویرگ یا سلول) و همچنین تولید ابزار و قطعات و مونتاژ آنها در ابعاد میکرو وجود دارد. با توجه به محدودیت های ابعادی موجود، انسان قادر به جابجایی دستی کنترل شده در این ابعاد نمی باشد. یکی از ابزارهایی که برای گرفتن اجسام میکرو، به صورت کنترل شده می تواند مورد استفاده قرار بگیرد، میکروگریپرها هستند. با استفاده از میکروگریپرها می توان اشیای میکرو را در شکل ها و جنس های مختلف گرفته و جابجایی نمود. یکرو گریپر دستگاهی است که با تکنولوژی MEMS ساخته می شود و تحقیقات گسترده ای روی میکروگریپرها انجام می شود.در طراحی میکروگریپر ها بدست آوردن نیروی دقیق وکنترل شده یک چالش است. میکروگریپرها برپایه عملگرهای الکترو استاتیکی یا الکتروگرمایی عمل می کنند.
پیشرفت تکنولوژی کوچک سازی اجسام بخصوص در اندازه های میکرو و نانو منجر به تولید و توسعه میکروگریپرها شده است. میکروگریپرها در زمینه های پزشکی و بیولوژیکی و زیست شناسی و در میکروروبات ها نیز کاربرد دارند. به طور کلی هدف از طراحی و ساخت میکروگریپرها گرفتن و حمل ایمن قطعات با ابعادی در محدوده میکرومتر و نانومتراست. این قطعات طوری طراحی می شوند تا بتوانند بصورت دقیق کار را انجام داده و با نیروی زیاد، دهانه خروجی را به اندازه مناسب باز یا بسته نمایند. این قطعه شامل یک بازوی حساس همراه با یک عملگر میکروالکتروترمال و حسگر می باشد. میکروگریپرها بخشی از سیستم های MEMS برای نگهداری، انتخاب، جابجایی و مونتاژ اجزای میکرونی هستند که دارای کاربردهای مختلف از جمله در ربات های میکرو، میکرو جراحیها، میکرو رله ها و ابزار پزشکی است.
میکروعملگر/محرک های حرارتی(thermal microactuator):
سیستم های میکرو الکترومکانیکی یکی از جنبه های تکنولوژی مدرن، شامل عناصر کوچک الکترومکانیکی ساخته شده با استفاده از تکنیک های ساخت میکرونی می باشند. بزرگ ترین وعده MEMS در توانایی تولید حرکت مکانیکی در یک مقیاس کوچک است. در حالی که بخش های تشکیل دهنده MEMS شامل ساختارهای کوچک شده، حسگرها، محرک ها و ميكروالكترونیک ها می باشد، قابل توجه ترین و مهم ترین بخش های آن شامل میکروسنسورها و عملگرهای میکرونی است.
عملگر/محرک های حرارتی دارای مزایایی نسبت به محرک های دیگر می باشند که از جمله می توان به جابجایی بیشتر در ولتاژهای پایین، ساختار قوی تر، نیروی خروجی بزرگ تر، بهره وری آسان تر، ساخت آسان تر و همچنین معایبی از جمله مصرف انرژی بالا و سرعت پایین برای انحراف که به نرخ انتقال حرارت بستگی دارد اشاره نمود. محرک های حرارتی با استفاده از دو قانون ژول و انبساط حرارتی مواد به تحریک مکانیکی مورد نظر دستیابی پیدا می کنند.
عملگر/محرک های حرارتی دارای مزایایی نسبت به محرک های دیگر می باشند که از جمله می توان به جابجایی بیشتر در ولتاژهای پایین، ساختار قوی تر، نیروی خروجی بزرگ تر، بهره وری آسان تر، ساخت آسان تر و همچنین معایبی از جمله مصرف انرژی بالا و سرعت پایین برای انحراف که به نرخ انتقال حرارت بستگی دارد اشاره نمود. محرک های حرارتی با استفاده از دو قانون ژول و انبساط حرارتی مواد به تحریک مکانیکی مورد نظر دستیابی پیدا می کنند.
عملگرهای حرارتی کوچک، قدرتمند و کارآمد گزینة مناسبی برای ادواتی نظیر ترموستات ها و MEMS میباشند. این نوع از عملگرها از طریق یک ولتاژ اعمال شده گرم می شوند و تغییرشکل می دهند بطوریکه باعث فعال شدن یک قطعه دیگر می شود. عملگرهای حرارتی شامل پدیده های الکتریکی، حرارتی و سازه ای هستند که بر عملکرد ادوات تاثیر می گذارند.
عملگرهای حرارتی: ادوات کوچک با تاثیر زیاد
عملگرهای حرارتی مانند مدارات گرمایشی، از طریق گرمایش ژول کار می کنند و شامل چندین تاثیر است:
1-جریان الکتریکی از عملگر عبور می کند.
2- مقاومت ماده به جریان تولید گرما می کند.
3- گرما سبب انبساط حرارتی شده، و بدین ترتیب عملگر را جابجایی می کند و می تواند مقاومت الکتریکی آن را تغییر دهد.
برخلاف مدارات گرمایشی، تغییرشکل یک تاثیر مطلوب در عملگرهای حرارتی است. در مقایسه با دیگر عملگرها، عملگرها و محرک های حرارتی مزیت های بیشماری دارند. از جمله کارآمدی بیشتر نسبت به محرک های شانه ای(comb drive) و دیگر عملگرهای الکتروستاتیکی، زیرا نیاز به ولتاژ بالایی ندارند. این مسئله آنها را برای ادواتی مانند ترموستات ها سودمند می نماید.
همچنین عملگرهای حرارتی به دلیل اندازه کوچک خود، تولید نیروی زیاد، و قابلیت تبدیل انرژی الکتریکی به حرکت در مقیاس میکرو، گزینه مناسبی برای ادوات MEMS هستند.
میکروماهواره ها نیز می توانند از میکروعملگرهای حرارتی برای کنترل حرارتی فعال استفاده نمایند.
بعضی از کاربردهای عملگرهای حرارتی یا میکروعملگرهای حرارتی عبارتند از:
-استفاده در کنترل حرارتی فعال برای میکروماهواره ها
-استفاده در میکروآینه ها
-استفاده در میکروپمپ ها و سیستم های میکروفلوئیدیک
-ارائه حرکت دقیق در ابزارهای پزشکی
-کنترل فیلترهای تنظیم پذیر RF
شرح پروژه:
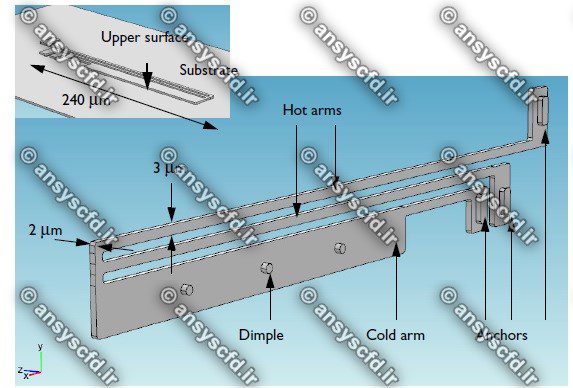
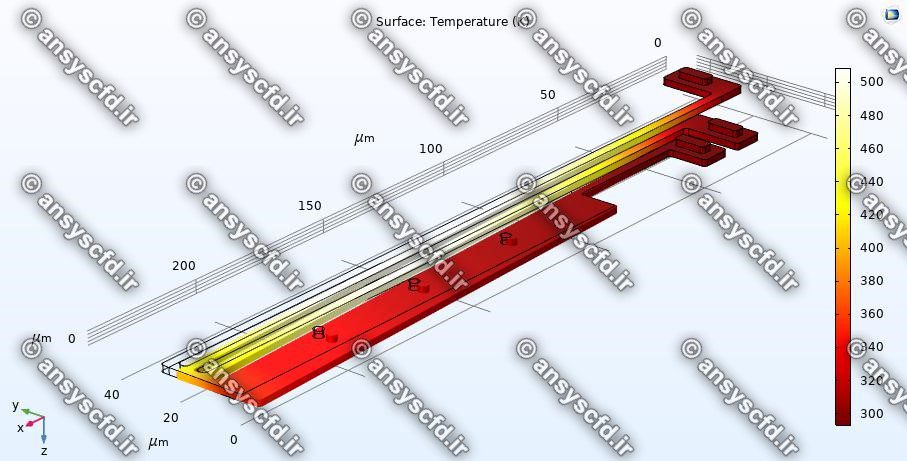
در این پروژه میکروعملگر حرارتی از جنس سیلیکون دارای دو بازوی گرم و یک بازوی سرد است که در نرم افزار کامسول(COMSOL) شبیه سازی شده است. میکروعملگر از طریق انبساط حرارتی فعال می شود. افزایش دمای مورد نیاز برای تغییرشکل دو بازوی گرم، و همچنین برای جابجایی عملگر، از طریق گرمایش ژول بدست می آید. انبساط حرارتی بازوهای گرم، در مقایسه با بازوهای سرد، سبب خمش عملگر می شوند.
خواص ماده پلی سیلیکون وابسته به دما است. جریان الکتریکی عبوری از بازوهای گرم سبب افزایش دما در عملگر می شوند بطوریکه انبساط حرارتی و تغییر در ضریب هدایت الکتریکی ماده را به همراه دارد. عمل عملگر شامل سه پدیده است: هدایت جریان الکتریکی، هدایت گرما با کمک تولید گرما، و تنش ها و کرنش های سازه ای به واسطه انبساط حرارتی.
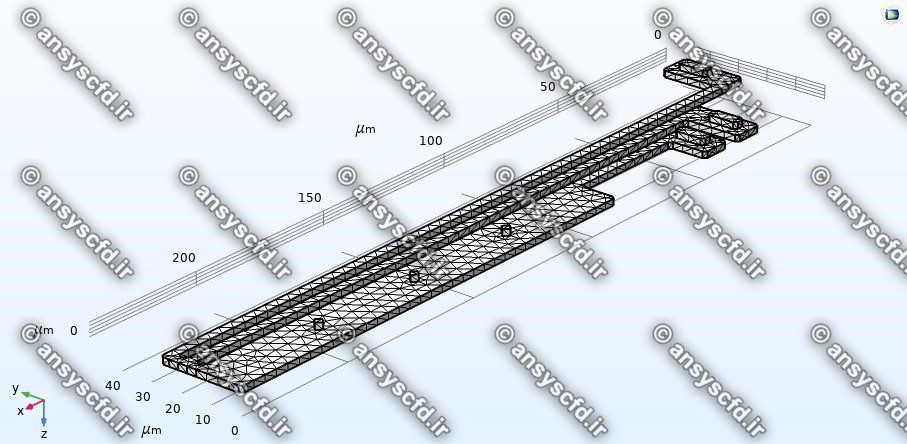
هندسه مسئله:
شماتیک هندسی مسئله در شکل زیر نشان داده است. در این شکل، بخش های عملگر/محرک و همچنین موقعیت آن نسبت به سطح زیرین نشان داده شده است.
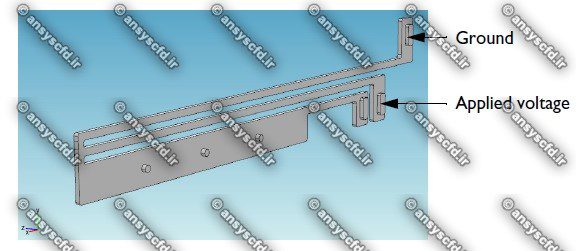
شرایط مرزی:
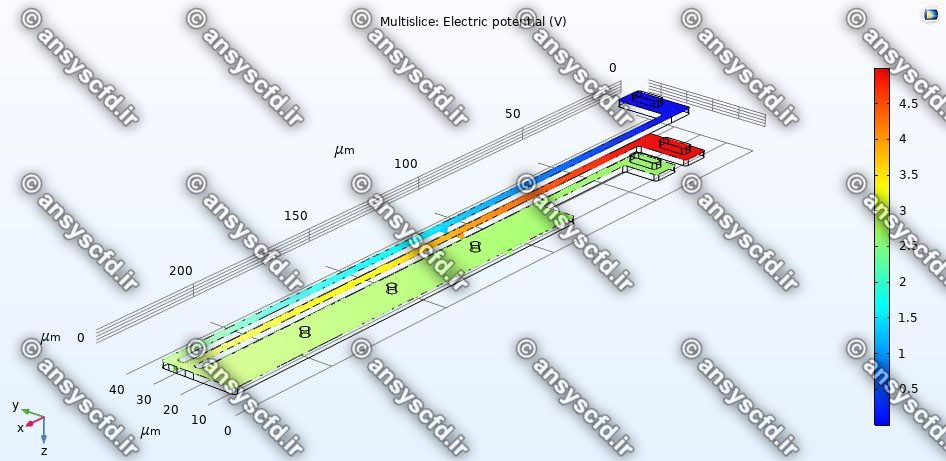
پتانسیل الکتریکی بین پایه های انکور بازوهای گرم اعمال می شود. انکور بازوی سرد و دیگر سطوح، به صورت عایق الکتریکی درنظرگرفته می شوند.
دمای پایه سه انکور و سه دیمپل با دمای سطح زیرین ثابت می شود. به دلیل ساندویچی بودن ساختار، تمامی مرزهای دیگر با مرزهای مجاور خود انتقال حرارت هدایتی دارند که از طریق لایه های نازک هوا منتقل میشود. ضریب انتقال حرارت توسط ضریب هدایت حرارتی هوا تقسیم بر فاصله تا سطوح مجاور سیستم بدست می آید. در این پروژه از ضرایب انتقال حرارت متفاوت برای سطوح بالایی و تحتانی و سایر سطوح میکروعملگر استفاده شده است.
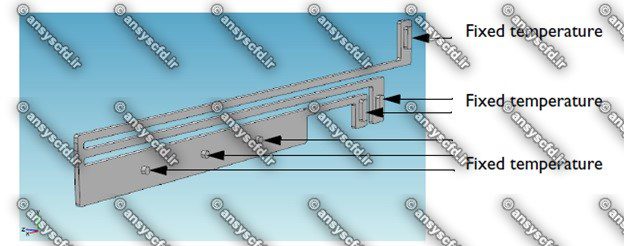
شکل شرایط مرزی انتقال حرارت.
تمام سه بازوی میکروعملگر در پایه سه انکور به صورت فیکس و ثابت هستند. دیمپل ها می توانند حرکت آزادانه ای در صفحه زیرین(صفحه x-y) داشته باشند اما در جهت عمود بر سطح زیرین(محور z) حرکتی ندارند.
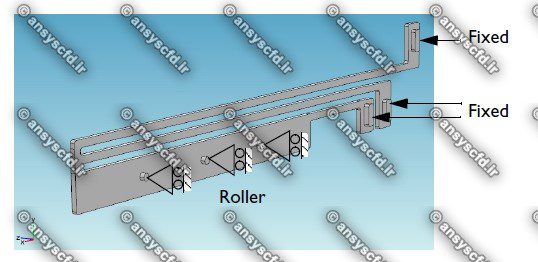
شکل شرایط مرزی سازه ای
هندسه:


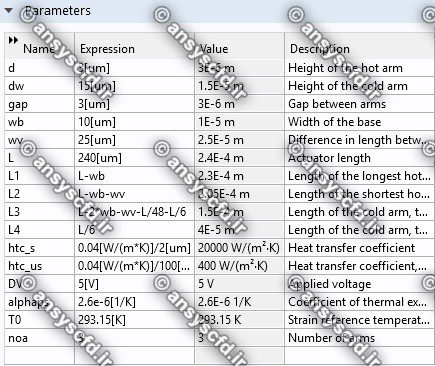
پارامترهای شبیه سازی:
خواص ماده پلی سیلیکون:

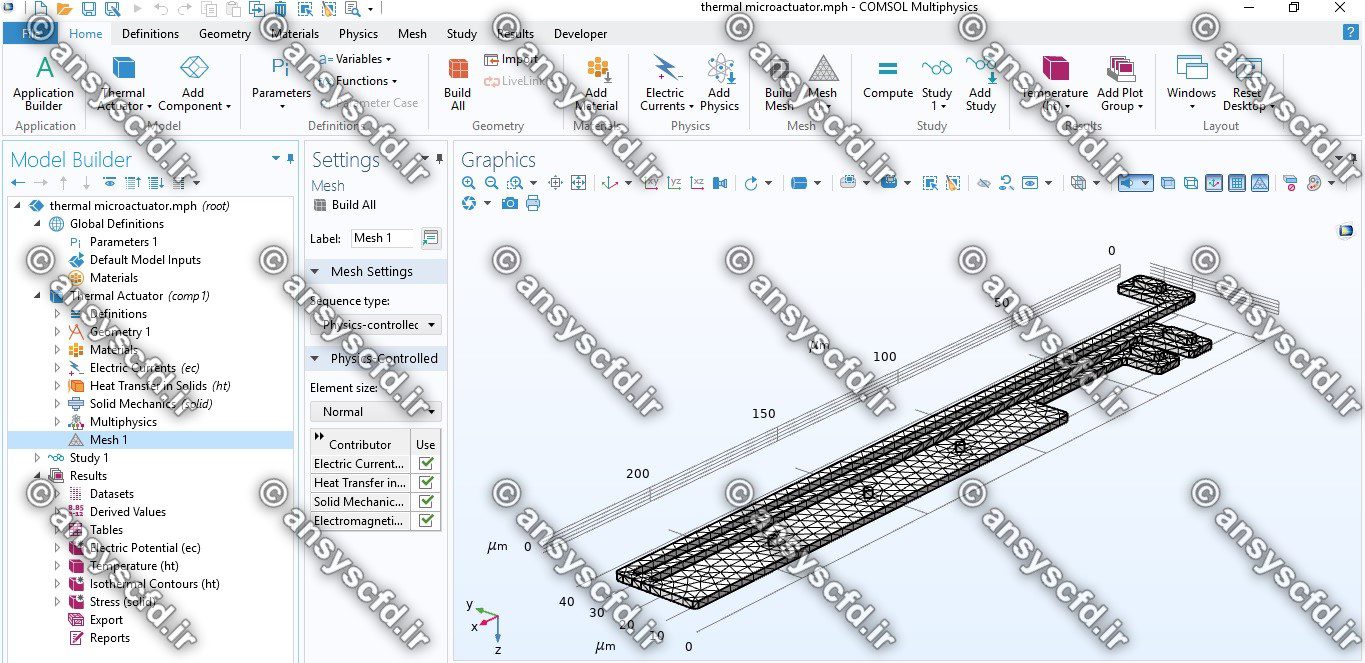
مش بندی:
شرایط مرزی اعمال شده:
نتایج شبیه سازی:
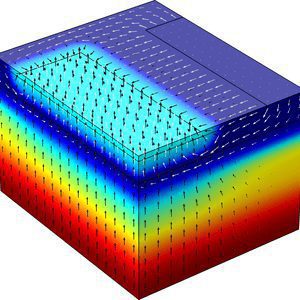
نتایج توزیع دمای سطح میکروعملگر:
نتایج پتانسیل الکتریکی در میکروعملگر حرارتی:
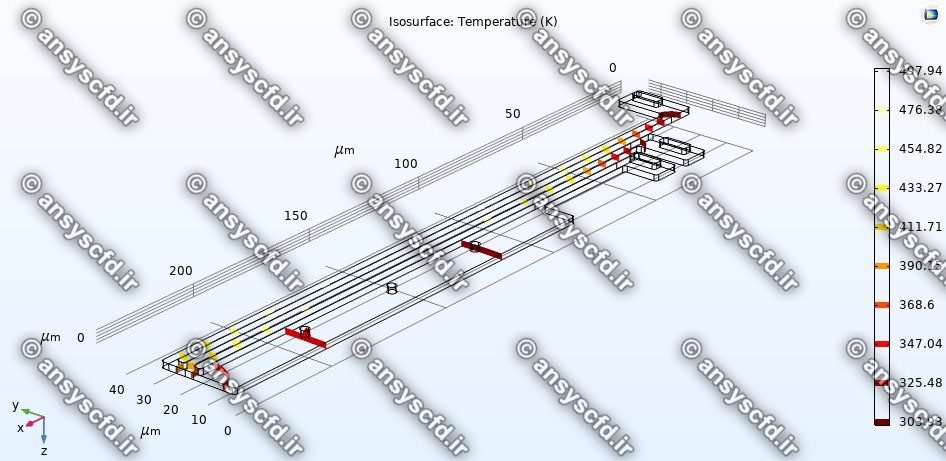
نتایج سطوح همدما در میکروعملگر حرارتی:
نتایج تنش در میکروعملگر حرارتی: