توضیحات
پروژه متلب مکانیابی بهینه گره های حسگر بیسیم(WSN) با الگوریتم ازدحام ذرات(PSO)
شبکه های حسگر بیسیم:
یک شبکه حسگر بیسیم متشکل از تعداد زیادی گره های حسگری است که در یک محیط به طور گسترده پخش شده و به جمع آوری اطلاعات از محیط می پردازند. لزوما مكان قرار گرفتن گره های حسگری، از قبل تعیین شده و مشخص نیست. چنین خصوصیتی این امکان را فراهم می آورد که بتوانیم آنها را در مکان های خطرناک و یا غیر قابل دسترس رها کنیم.
بطور کلی خصوصیات یک شبکه حسگر به شرح زیر است:
1- ارتباطات رادیویی با برد کم و مسیریابی چند گامه
2-توزيع شبکه با تعداد گره زیاد و همکاری بین گره ها
3- تغییرات پیاپی توپولوژی شبکه بواسطه خرابی یا اتمام انرژی گره ها
4-محدودیت در انرژی، توان ارسال ،حافظه و توان محاسباتی
این خصوصیات و بالاخص 3 خصوصیت آخر شبکه های حسگری را از شبکه های موردی و Mesh متمایز می نماید.
پیشترفت شبکه های حسگر، سه تکنولوژی از سه حوزه را نیاز دارد: تکنولوژی درک محیط ، ارتباطات و محاسبات (شامل سخت افزار، نرم افزار و الگوریتم). پیشترفت هر یک از این حوزه ها، به پیشرفت در شبکه حسگر منجر می شود. کاربردهای مختلف این شبکه ها ، بعضی نیازمندی های مشترک هم دارند. مثلا یک گره باید انرژی بسیار اندکی مصرف کند تا مدت زمان طولانی تری بتواند به کار ادامه دهد. انتقال پیام ها بین گره ها باید در چند گام ، بوسیله گره های میانی صورت پذیرد، تا لازم نباشد محدوده ارسال هر گره خیلی زیاد باشد.
ضمنا انجام محاسبات باید توزیع شده باشد تا عمر كل سیستم بالا رود. هر گره حسگر تنها می تواند مقدار محدودی اطلاعات را پردازش کند. اما وقتی تعداد زیادی گره به صورت هماهنگ به تبادل اطاعات بپردازند ، توانایی نظارت بر یک محیط فیزیکی، با جزئیات هر چه بیشتری را پیدا می کنند. پس یک شبکه حسگر میتواند به عنوان مجموعه ای از گره های حسگر که برای انجام کار خاصی با هم همکاری دارند تعریف شود. بر خلاف شبکه های سنتی، شبکه های حسگر به آرایش متراکم و همکاری برای انجام دادن وظیفه شان نیاز دارند.
ساختار کلی شبکه حسگر بی سیم :
حسگر : وسیله ای که وجود شین رخداد یک وضعیتیا مقدار یک کمیت فیزیکی را تشخیص داده و به سیگنال الکتریکی تبدیل می کند. حسگر انواع مختلف دارد مانند حسگرهای دما, فشار, رطوبت, نور, شتاب سنج, مغناطیس سنج و…
گره حسگر: به گره ای گفته می شود که فقط شامل یک یا چند حسگر باشد.
شبکه حسگر: شبکه ای که فقط شامل گره های حسگر باشد. در کاربردهایی که هدف جمع آوری اطلاعات و تحقیق در مورد یک پدیده می باشد کاربرد دارد. مثل مطالعه روی گردبادها.
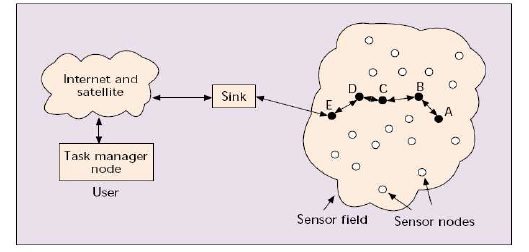
Sink یا چاهک: گرهی که جمع آوری داده ها را به عهده دارد. و ارتباط بین گره های حسگر و گره مدیر وظیفه را برقرار می کند.
گره مدير وظیفه: گرهی که یک شخصی بعنوان کاربر یا مدیر شبکه از طریق آن با شبکه ارتباط برقرار میکند. فرامین کنترلی و پرس و جو ها از این گره به شبکه ارسال شده و داده های جمع آوری شده به آن بر میگردد نحوه عملیات: در این ساختار داده ها توسط گره ها به سمت چاهک هدایت شده و فرمان از طریق چاهک نیز به گره های حسگر صادر شود. شکل زیر این وضعیت را نمایش می دهد.
شکل ساختار کلی شبکه حسگر بی سیم.
معماری ارتباطی شبکه حسگر:
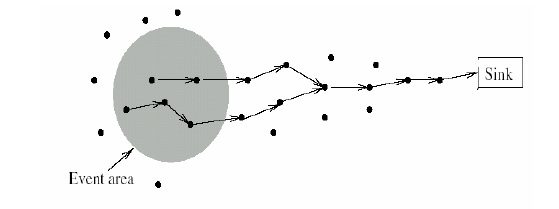
معمولا نودهای حسگر در محیطی به نام محیط حسگر پراکنده می شوند. این نودها توانایی جمع آوری داده و ارسال داده به نودی به نام نود جمع آوری کننده یا سینک می باشند. این نودها در واقع به نوعی مانند دروازه ارتباطی برای ارتباط با کاربر ، عمل می کنند. نود سینک معمولا دارای اتصال مطمئن (مثلا سیم یا ماهواره ) می باشد.
شکل پراکندگی حسگرها در محیط حسگر.
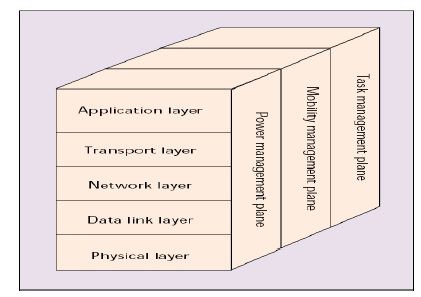
پشته پروتکل شبکه حسگر:
مطابق شکل زیر پشته پروتکلی از یک طرف دارای پنج لایه افقی شامل لایه های فیزیکی و پیوند داده, شبکه, انتقال و کاربرد و از طرفی دارای سه لایه عمودی مدیریت توان, مدیریت جابجایی و مدیریت وظیفه است. لایه فیزیکی وظیفه اش عملیات مدولاسیون و ارسال و دریافت در سطح پایین می باشد. لایه کنترل دسترسی رسانه باید قادر باشد با حداقل تصادم به روش پخش همگانی با هر گره همسایه ارتباط برقرار کند. لایه شبکه وظیفه مسیر دهی داده هایی که از لایه انتقال می آید را بر عهده دارد. لایه انتقال وظيفه مدیریت جریان انتقال بسته ها را در صورت نیاز کاربر در بر عهده دارد. بسته به کاری که شبکه برای آن طراحی شده انواع مختلف نرم افزارهای کاربردی می تواند روی لایه کاربرد استفاده شود و خدمات مختلفی را ارائه نماید.
لایه عمودی مدیریت توان با دخالت در کلیه لایه های افقی چگونگی مصرف توان برای گره را تعیین می کند. در واقع برای کاهش مصرف انرژی به الگوریتم ها و پروتکل های توان آگاه نیازمندیم. مثلا اینکه یک گره پس از دریافت یک پیغام از یکی از همسایه هایش دریافت کننده اش را خاموش کند باعث جلوگیری از دریافت دوباره پیغام و در نتیجه کاهش مصرف انرژی می گردد. ایده دیگری که می تواند همزمان استفاده شود این است گره ای که به سطح پایین انرژی رسیده به همسایه هایش اعلام همگانی می کند که انرژی اش در حال اتمام است و نمی تواند در مسیردهی پیغامها شرکت داشته باشد. گره های همسایه پس از آن پیغام ها را از طریق گره های دیگر مسیردهی خواهند کرد. لایه عمودی مدیریت حرکت, به بکار گیری روش های مکان آگاه بر می گردد جابجایی گره را تشخیص داده و ثبت می کند.
بنابراین یک مسیر برگشت تا کاربر همیشه مدیریت می شود و رد گره متحرک دنبال می شود. مدیریت وظيفه وظایف گره ها را زمانبندی کرده و متعادل می سازد. مثلا اگر وظیفه حس به یک ناحية معين محول شد همه گره های حسگر آن ناحیه لازم نیست عملیات حس را بطور همزمان انجام دهند بلکه این وظیفه می تواند بسته به کاربرد به برخی گره ها مثلا به گره هایی قابلیت اطمینان بیشتریا ترافیک کمتر یا انرژی بیشتر دارند محول شود. برای تضمین این نکته باید از الگوریتم های کارآگاه استفاده نمود. ترکیب این لایه ها برای کار درست شبکه حسگر به صورت موثر در انرژی ، ارسال داده ها در شبکه حسگر متحرک و اشتراک منابع بین حسگر ها ، لازم است.
محدودیت های شبکه حسگر
این شبکه محدودیت های خاص خود را دارد که همواره در طراحی های خود برای سیستمی موثر ، باید مدنظر داشته باشیم.
1-کاربرد ad hoc : نودها معمولا در محیطی بدون زیر ساخت به کار برده می شوند. مثلا در جنگل از هواپیما ریخته می شوند. نودها خود باید اتصال و توزیع خود را بشناسند.
- کاربرد بدون مراقبت : معمولا این شبکه بدون دخالت انسان فعالیت می کند.
- بدون منابع کمکی : حسگرها به منبع انرژی خارجی متصل نیستند و از محدود انرژی باطری برای محاسبات و ارتباطات استفاده می کنند.
- تغییرات پویا : شبکه باید با تغییرات در اتصالات خود اضافه و کم شدن نودها ، خرابی نودهاو..) و محیط خود، وفق پذیر باشد.
نمونه های کاربردی:
با وجود شبکه های پر سرعت و قابلیت های محاسباتی شبکه حسگر ، کاربردهای گسترده ای از جمله در هوافضا، نظامی ، پزشکی ، رباتیک ، پیش بینی هوا و … قابل تصور می باشد. در زیر به چند نمونه از این سیستم ها اشاره می کنیم.
1) زیر ساخت های امنیتی کاربرد امنیتی و ضد تروریسمی، نگهبانی از زیرساخت های حساس چون نیروگاه ها 2) مانیتورینگ محیط و منابع طبیعی : بررسی جمعیت پرندگان و ..
3) کاربردهای صنعتی : برای بررسی صحت ماشین ها ، و اعمال در جاهایی که برای انسان قابل دسترسی نیست. نیز اعمال در کارخانه ها و استفاده از شبکه راه دور برای اطمینان از اینکه فعالیت های کارخانه مطابق استاندارد است.
4) کاربردهای نظامی سیستم های ارتباطی, فرماندهی و شناسایی و دیده بانی و میدان مین هوشمند, سیستم های هوشمند.
5) کاربردهای مراقبت پزشکی: سیستم های مراقبت از بیماران ناتوان ، محیطهای هوشمند برای افراد سالخوده ، شبکه ارتباطی بین مجموعه پزشکان با یکدیگر و پرسنل بیمارستان و نظارت بر
6) کاربردهای تجاری : آتش سوزی(در جنگل)، تشخیص آلودگی های زیست محیطی از قبیل آلودگی های شیمیایی، میکروبی هسته ای، سیستم های ردگیری، نظارت و کنترل وسایل نقلیه و ترافیک و ..
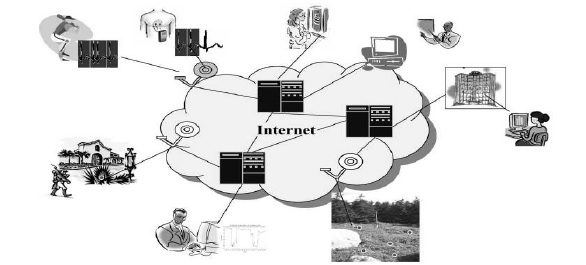
شکل برنامه های کاربردی شبکه های بی سیم حسگر.
اهمیت سیستم مکان یابی:
- تعیین موقعیتی که داده ها از آن جمع آوری شده
- ارتباط بین گره های میانی برای رد و بدل اطلاعات در شبکه
- آدرس دهی به گره ها
4 مدیریت شبکه (پرس و جو از گره های مستقر در یک ناحیه ، ارزیابی آنها و بررسی انرژی آنها)
- الگوریتم های جغرافیایی: این الگوریتم ها از اطلاعات مکان یابی گره ها برای استفاده بهینه از منابع شبکه استفاده می کنند. مثلا الگوریتم های Routing , density Control , object tracking.
شرایط لازم برای یک سیستم مکان یابی :
مهمترین شرایط لازم برای یک سیستم مکان یابی از قرار زیر می باشد:
- مستقل از هر زیر ساختی باشد(Auto – organization)
- قابلیت پشتیبانی از شبکه های متراکم و بزرگ(Scability)
- قابلیت تحمل در برابر خطاهای فاصله و موقعیت در ارتباطات بین نودها (Robustness )
- استفاده بهینه از منابع شبکه (Efficiency).
اجزای یک سیستم مکان یابی :
- Distance / Angle Estimation: این جز برای تخمین فاصله / زاویه بین دو گره می باشد.
- Position Computation : این جز مسئول تخمین موقعیت گره ها نا شناخته بر اساس اطلاعات فاصله زاویه و موقعیت گره هایReference می باشد.اطلاعات این جز توسط اجزای دیگر استفاده می شود.
- Localization algorithm: مهمترین جز است و تعیین می کند چگونه اطلاعات موجود برای تخمین موقعیت گره های دیگر استفاده شوند.
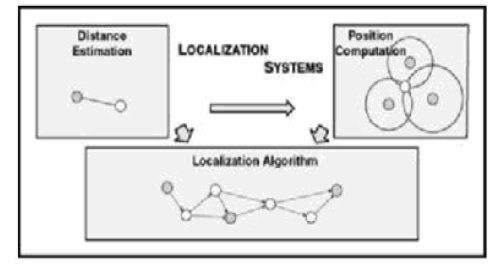
شکل اجزای یک سیستم مکان یابی.
مواردی که در عملیات مکان یابی باید مد نظر قرار گیرد:
لایه فیزیکی:
تکنولوژی که در لایه فیزیکی مورد استفاده قرار می گیرد عملکرد مکان یابی را به کلی تحت تاثیر قرار می دهد. به دلیل اینکه مسائلی از قبیل پهنای باند، فرکانس، قدرت ارسال سیگنال ها، نوع مدولاسیون و نوع آنتن های بکار گرفته شده می تواند نتایج را تغییر دهد. پر واضح است که در فرکانس های بالاتر دقت عملیات افزایش پیدا می کند ولی فرکانس بالا باعث کاهش بیشتر قدرت سیگنال، و درنتیجه باعث کاهش محدوده ارسال آن می شود. و در اینجا یکtrade off بین دقت و سرعت وجود دارد.
تکنولوژی های بکار رفته در لایه فیزیکی:
1-ماوراء صوت:
امواج ماوراء صوت به راحتی از موانع عبور می کند و موانعی مانند دیوار نمی تواند مشکلی برای این امواج ایجاد کند. همچنین از دقت بیشتری نیز برخوردار می باشند. مانند TOA.
2-مادون قرمز:
برای استفاده از این امواج بین دو نقطه مورد نظر باید دید مستقیم وجود داشته باشد. همچنین نور خورشید بر این امواج تاثیر گذاشته و دقت خوبی هم ندارد.
3- فرکانس رادیوئی:
استفاده از این روش به دلیل مجهز بودن اکثر گره های حسگر به تجهیزات ارسال و دریافت رادیوئی ارزانتر از بقیه است. ولی بدلیل اینکه موانع باعث بازتابی این امواج می – شوند دقت مورد انتظار را ندارند.
گره های مرجع / راهنما:
تعداد قابل توجهی از روش های مکان یابی از تعدادی گره استفاده می کنند که این گره ها از قبل از موقعیت خود آگاهند و در مکان یابی گره های دیگر نقش مهمی را ایفا می کنند و این گره ها یا به صورت دستی و یا از طریقGPS موقعیت آنها مشخص می شود که به این گره ها گره های لنگر یا راهنما می گویند که در یک فضای دو بعدی حداقل سه عدد از این گره ها برای گره های دیگر لازم است. در این میان برای نسبی گره ها لازم است گرهها موقعیت خود را نسبت به هم بدست آورند و سپس جهت تبدیل این موقعیت نسبی به موقعیت مطلق از گروه های مرجع کمک بگیرند. برای اینکه گره ها بتوانند در کل شبکه از گره های مرجع کمک بهتری بگیرند باید این گره ها به نحوی توزیع گردند که در تمام شبکه پخش شده باشند تا هم گره ها بتوانند استفاده مطلوبی از این توزیع شدگی ببرند.
در این بین روش هائی نیز وجود دارد که از گره های مرجع استفاده نمی کنند که به این روش ها اصطلاحا روش هایAnchor less گفته می شود. در این روش ها وجود یا عدم وجود اتصال بین گره های مختلف جهت مکانیابی استفاده می شود. در این روش ها هر چه اتصالات گره ها با همسایگانشان بیشتر باشد مکان یابی دقیقتر می شود. مزایایی که روش های مکان یابیAnchor base نسبت به Anchor less دارند این است که این روش ها انرژی کمتری نسبت به روش هایAnchor less مصرف می کنند و نیازی به مشخص بودن محدوده بکارگیری شبکه و نحوه توزیع گره ها از قبل نیست. ولی در عوض معایبی نیز دارند و آن اینکه این گره ها (Anchor) گرانقیمت ترند باعث کاهش امنیت سیستم می شود چون اختلال در این گره ها موجب می شود تا سایر گره ها نتوانند موقعیت خود را به درستی محاسبه کنند.
شیوه مکان یابی:
مکانیابی می تواند توسط گره های ناشناس یا توسط گره های لنگر انجام شود.
برای مکان یابی گره های ناشناس، گره ای که قرار است مکان یابی شود با دریافت سیگنال از گره های لنگر و بدست آوردن فاصله از آنها موقعیت خود را محاسبه می کند.
در روش دوم گره های لنگر با دریافت سیگنال از گره های ناشناس عمل مکان یابی را انجام می دهند و در صورت لزوم موقعیت محاسبه شده را به گره مورد نظر ارسال می کنند.
پارامترها و معیارهای ارزیابی روش های مکان یابی:
پارامترهایی می توانند کارائی روش های را تحت تاثیر قرار دهند. برخی از پارامترهای عبارتند از چگالی توزیع گره ها، تعداد گره های مرجع، میزان بی نظمی شبکه و غیره… به عنوان مثال برخی از روش های مکان یابی مانند Multilateration ، تحت تاثیر تعداد گره های مرجع هستند به طوری که با افزایش تعداد گره های مرجع دقت بالاتری را ارائه می دهند. هرکدام از روش های مکان یابی عموما بر اساس تاثیر یک یا چند پارامتر بر معیارهای ارزیابی روش، نظیر توسعه پذیری روش، دقت، میزان گره های تحت پوشش و سربارهای ارتباطی، محاسباتی و غیره ارزیابی می شوند. پارامترهای مکان یابی که عموما در روش های مختلف مورد بررسی قرار می گیرند، عبارتند از :
1- تعداد مراجع: آن دسته از گره های حسگر که به عنوان گره های مرجع در نظر گرفته می شوند.
2- چگالی گره ها: تراکم توزیع گره های حسگر و یا تعداد اتصالات هر گره با گره های دیگر می باشد.
3- سرعت حرکت مراجع: وقتی که گره های مرجع متحرک باشد سرعت حرکت آنها می تواند به عنوان یک پارامتر در نظر گرفته شود.
4- موقعیت قرار گیری مراجع: این پارامتر می توان از پیش تعیین شود و یا به صورت تصادفی در نظر گرفته شود.
5- رنج رادیوئی گره ها: در شبکه های بی سیم برای گره ها تا یک شعاع مطلوب یک رنج رادیوئی وجود دارد. 6- رنج رادیوئی مراجع: رنج رادیوئی گره های مرجع را در مقایسه با دیگر گره های شبکه میتوان بیشتر در نظر گرفت و یکی از مشخصه های برتری گره های مرجع نسبت به دیگر گره ها رنج رادیوئی آنها می باشد.
7- اندازه نقشه محلی برای روش های مبتنی بر MDS و همچنیناندازه خوشه برای روش های مبتنی برخوشه بندی می توانند به عنوان پارامترهای مطرح باشند.
8-درصد بی نظمی شبکه: اکثر روش های مکان یابی تحت تاثیر میزان بی نظمی شبکه میباشند. به همین دلیل روش های مختلف مکان یابی گره ها را با دقت متفاوتی انجام میدهند
فاکتورهای مهم جهت انتخاب روش های مکان یابی:
معیار های ارزیابی روش های شامل توسعه پذیری ، دقت، زمان پاسخ گوئی، هزینه ، پیچیدگی محاسباتی، میزان پیغام های مبادله شده یا سربار ارتباطی، تحمل پذیری خطا، خود سازمان دهی، پوشش و غیره می باشد.
دقت:
روش های مکان یابی چند گامه که از ابزارهای شدت سیگنال، صوت و غیره به منظور اندازه گیری فاصله گره های حسگر استفاده می کنند، به دلیل وجود خطای اندازه گیری ابزار و همچنین تاثیر محیط بر نتایج اندازه گیری، ممکن است با قدری خطا مکان گره ها را تعیین نمایند.
توسعه پذیری:
عوامل زیادی بر توسعه پذیر بودن روش های مکان یابی تاثیر می گذارد. برای مثال میزان وابستگی روش به گره های مرجع یکی از مهمترین عواملی است که بر توسعه پذیری روش تاثیر می گذارد.
هزینه:
در روشهای مکان یابی هزینه به عواملی مانند سخت افزار، تجهیزات بکار رفته، میزان انرژی مصرفی و غیره بستگی دارد. هزینه سخت افزاری با افزایش قطعات سخت افزاری و گره های مرجع افزایش می یابد و انرژی مصرفی زمانی افزایش پیدا می کند که سر بار ارتباطی با تعداد پیغام های مبادله شده افزایش پیدا کند.
تحمل پذیری در برابر خطا:
روش هائی که محاسبات را به شیوه متمرکز انجام می دهند در برابر خطا تحمل پذیری کمتری دارند که روش MDS – MAP نمونه ای از روش هائی است که به شیوه متمرکز عمل می کنند و همچنین روش هایی هم که در معرض عوامل محیطی هستند به دلیل تاثیر محیط در معرض خرابی بیشتری نسبت به سایر روش ها دارند. روش های مکان یابی توزیع شده از تحمل بالائی در برابر بروز خطا برخوردارند.
نیاز به منابع و پیچیدگی محاسباتی:
بسته به نحوه بکارگیری شبکه حسگر، نیازمندی به منابع می تواند متفاوت باشد. گره های مرجع نسبت به گره های معمولی از منابع بیشتری برخوردارند و به همین دلیل عمده عملیات محاسبه ای باید به سمت آنها هدایت شود.
تاثیر بر لایه های پایین شبکه: لایه های پایین شبکه ممکن است بر اثر عملیات مکان یابی، متحمل سربار زیادی شوند. خصوصا این سربار هنگامی زیاد می شود که به جای استفاده از GPS از ارتباطات شبکه اصلی برای ردوبدل کردن پیام های مکان یابی استفاده کنیم، این موضوع اهمیت بیشتری پیدا می کند. مواردی مانند تاخیر اضافی، ترافیک داده بیشتر و پردازش مربوط به عمل مکان یابی ممکن است کارائی لایه های پایین تر را تحت تاثیر قرار دهد.
امنیت:
حمله کنندگان به شبکه ممکن است به روش های مختلف به داده های شبکه دسترسی پیدا کنند و محاسبه مکانی گره ها می تواند در این میان نقش بسزائی در عدم دسترسی به این منابع داشته باشد. استفاده از روشهای مکان یابی امن راهی برای جلوگیری از این حملات می باشد.
مکان یابی در شبکه های حسگر بی سیم
اهمیت مکان یابی:
به دلایل بسیاری حل مسئله مکان یابی می تواند تعین کننده باشد. تا زمانیکهGPS در محیط های خارجی قابل استفاده است و فقط در چنینشبکه هایی به کار می رود، به دلایل زیر برای شبکه های حسگر بی سیم مناسب نیست.
1) GPS در محیط های داخلی قابل استفاده نیست و سیگنال های ماهواره ای در این محیط ها در دسترس نمی باشند.
2) اکثر کاربردها نیاز به اطلاعات مکانی با دقت بالا دارند که به وسیلهGPSفراهم نمی شود.
3) محدودیت باطری ها در اکثر شبکه های حسگر استفاده از GPS را بسیار ناکارآمد می گرداند.
4) وقتی شبکه ای با هزاران نود داشته باشیم، نصب GPS بسیار گران و هزینه بر خواهد بود.
5) سایز نودها در بسیاری از موارد خیلی کوچکتر از وقتی است که روی آنها GPS نصب شده باشد.
دلایل بسیاری هم وجود دارد که بیان کننده مفید بودن اطلاعات مکانی است و اینکه چرا مورد نیاز می باشند، این دلایل عبارتند از:
1) ثبت داده های حس شده : داده های حس شده در بسیاری از موارد وقتی مکان قرارگیری آنها در فضا (و گاهی اوقات در زمان معلوم نباشد قابل استفاده نیستند.
2) هدف یابی مؤثر: وقتی حسگرها از مکانشان مطلع باشند، بخشی از آنها می تواند برای انجام عملیات خاصی فعال شوند. بدین ترتیب حسگرها می توانند انرژی را در مواقعی که مورد نیاز نیستند، ذخیره کنند و از ارسال و دریافت پیام های اضافی جلوگیری می شود. از اینرو ارتباطات بسیار کارا و مؤثر خواهد شد.
3) ردیابی هدف: وقتی که قصد شبکه ردیابی هدف در منطقه ای باشد، مکان یابی نود کاملا ضروری است. بخصوص وقتی شبکه باید قادر به بازسازی خود باشد (به عنوان مثال در میدان مین)، یا برای پذیرفتن خرابی نودها، حرکت هدف و نفوذهای امنیتی.
4) انتشار جغرافیایی: بعضی از کاربردها به نودهایی نیاز دارند که قادر به ارسال پیام ها به مناطق ویژه (به جای نودهای دیگر) و یا در یک زمان ویژه باشند. چنین نودهایی باید موقعیت خود و همینطور موقعیت همتاهای خود را بدانند.
5) قرار گیری (گسترش) خودکار: وقتی در شبکه نودهای متحرک وجود داشته باشند، شبکه میتواند از الگوریتم هایی استفاده کند که نودها به صورت افزایشی توسط خودشان آرایش می گیرند و منطقه تحت پوششان افزوده خواهد شد که این مسئله قدرتمندی و استحکام ارتباطات در شبکه را تضمین می کند. در چنین قرار گیری هایی فرض بر این است که نودها از موقعیت خود در منطقه گسترششان آگاهند.
6) پروتکل های مسیریابی: پروتکل های ارتباطی مثل پروتکل های مسیریابی مبتنی بر مکان(LAR) از اطلاعات مکانی به منظور کشف مسیر استفاده می کنند. اطلاعات مکانی برای محدود کردن فضای جستجو در طی پروسه کشف مسیر استفاده می شود. بدین ترتیب پیام های کشف مسیر کمتری نیاز خواهد بود.
در شبکه های موردی سیار مثل MANET ، اطلاعات مکان یابی برای طراحی دروازه های متحرک به منظور افزایش جریان اطلاعاتی درون شبکه استفاده می شود و برای ایجاد مسیرهای مناسب برای انتقال اطلاعات ارتباطی به ایستگاه های خارج از منطقه گسترش به کار می رود
با توجه به اینکه شبکه های حسگر بی سیم کاملا وابسته به کار برد، عمل می کنند در بسیاری از مواقع دانستن موقعیت مکانی گره های حسگر می تواند در بسیاری از پروتکل های تحویل اطلاعات به ایستگاه مرکزی و برآورده سازی اهداف مورد نظر کاربردهای مفید باشند. به عنوان مثال اگر در یک محیط صنعتی در حال جمع آوری اطلاعات دمای محیط باشیم از دریافتیک پیام مشخص کننده دما هیچ سودی نخواهیم برد مگر اینکه مکان قرار گرفتن گره ارسال کننده این پیام را بدانیم. یا هنگام وقوع آتش سوزی در جنگل تنها اطلاع از وقوع آتش سوزی کافی نیست و باید موقعیت محل آتش سوزی را نیز بدانیم. در مورد پروتکل ها نیز، با توجه به اینکه شبکه های حسگر بی سیم باید در مصرف انرژی بسیار هوشمندانه عمل کنند، آگاهی از موقعیت مکانی گره ها می تواند به افزایش کارایی انرژی در این الگوریتم ها کمک کند. از جمله این الگوریتم ها می توان، الگوریتم های مسیریابی مبتنی بر موقعیت جغرافیایی را نام برد که با دانستن موقعیت مکانی گره ها حداقل مسافت طی شده برای تحویل دادها در نظر گرفته می شود. از طرفی با توجه به اینکه گره های حسگر به صورت تصادفی و معمولا بیرون از محیط (توسط هواپیما برای کاربردهای زمینی و قایق برای کاربردهای دریایی) در محیط پراکنده می شوند ناظر از موقعیت گره ها به طور دقیق آگاه نیست. بنابراین به مکان یابی برای پیدا کردن موقعیت گردها نیازمند است. ساده ترین راه حل برای تشخیص مکان گره های حسگر، مجهز کردن آنها به تجهیزاتGPS است. اما گیرنده هایGPS بسیار پرهزینه و از نظر فیزیکی حجیم و سنگین هستند. روش دیگری که جهت موقعیت هایی گره های حسگر مورد استفاده قرار می گیرد، استفاده از گرههای لنگر می باشد. به طوری که گره های لنگر مجهز به سیستمGPS بوده و در شبکه مکان دقیق خود را می دانند و سایر گره های حسگر موقیت خود را از طریق این گرهها محاسبه خواهند نمود. | روش های زیادی در مکان یابی شبکه های حسگر بی سیم وجود دارد که بررسی همه آنها امکان پذیر نمی باشد ولی از مهمترین روش ها و الگوریتم های مکان یابی می توان به موارد ذیل اشاره کرد.
روش Mobile Beacon مبتنی بر فاصله، استفاده از مرجع متحرک، متمرکز و تک گامی و از آنتن معمولی استفاده می کند.
از مزایای این روش می توان به دقت بالا، توسعه پذیری اشاره کرد و از معایب آن نیز به سرعت مکان یابی کم، مصرف انرژی زیاد و همچنین محیط باید هموار باشد تا گره لنگر متحرک راحت حرکت نماید.
روش (Semi Definite Programming یا SDP) غير مبتنی بر فاصله، متمرکز، بدون نیاز به گره لنگر، چند گامی، از آنتن معمولی استفاده می کند. از مزایای این روش می توان به سادگی اجرا در محیطهای ناهموار و پر مانع، سرعت خوب اشاره کرد و از معایب این روش به دقت پایین، متمرکز بودن، قابلیت توسعه پایین و محاسبات زیاد اشاره کرد.
روشMulti Dimentional Scaling (MDS)- MAP این روش از جهاتی به روش قبلی شباهت دارد. با این تفاوت که تنها اطلاعات توپولوژیکی را نگه نمی دارد. بلکه فاصله بین هر دو گره که در برد هم قرار دارند محاسبه شده و به مرکز داده می شود.
روش هایRobust Positioning و DV – Hop غير مبتنی بر فاصله، چند گامی، نیاز به گره لنگر ثابت، چندگامی و از آنتن معمولی استفاده میکند. از مزایای این روش می توان به دقت نسبتا خوب، هزینه کم سخت افزاری، توزیع شده، زمان مکان یابی نسبتا پایین و از معایب آن به ایجاد مشکل در وجود موانع، تعداد پیام های بالا، مصرف انرژی زیاد، نیاز به تعداد زیادی حسگر در واحد مساحتاشاره کرد.
روشDiffusion غير مبتنی بر فاصله، نیاز به گره ثابت و از آنتن معمولی استفاده می کند. از مزایای این روش میتوان به سادگی، توزیع شده، قابلیت توسعه بالا، محاسبه کم، مصرف انرژی کم اشاره کرد و از معایب آن نیز به زمان مکان یایی بالا، دقت نسبتا پایین، نیاز به تعداد گره بالا در واحد مساحت اشاره کرد.
روشALD مبتنی بر فاصله، متمرکز، چند گامی، ونیاز به گره لنگر متحرک و از آنتن معمولی در شبکه استفاده میکند. از مزایای این روش می توان به دقت بسیار بالا، سادگی زیاد و از معایب آن فرض اشتباه، هزینه بالا، مصرف انرژی بالا، قابل استفاده تنها در محیط های هموار و مکان یابی نشدن اکثر گره ها اشاره کرد.
بررسی ها نشان می دهد که در تحقیقات اخیر بیشتر سعی شده است تا با به کار گیری از الگوریتم های هوشمند و با بهره گیری از گره های لنگر موجود در محیط موقعیت سایر گروه های حسگر را مشخص و خطاهای مکانیابی را در کل شبکه کاهش دهند.
برای طبقه بندی روش های مکان یابی از معیارهای مختلفی استفاده می شود. در اصلی ترین طبقه بندی، روشهای مکان یابی را به دو نوع استفاده کننده از گره لنگر و بی نیاز از گره لنگر تقسیم می کنیم. روشهایی که از گره لنگر استفاده می کنند درصدی از گره ها را به تجهیزات اضافیو قابلیت های بیشتر مجهز کرده و به آنها نقش مرجع می دهند. گره های مرجع با مکانیزمی باید از قبل از مکان خود آگاه باشند. معمولا گره لنگر از دو روش برای کشف مکان خود استفاده می کند. یا از قبل به صورت دستی در محل قرار می گیرد،یا از طریق سیستمGPS از مکان خود آگاه می شود. روش های مبتنی بر مرجع خود به دو نوع تقسیم می شوند. روشهایی که از گره لنگر ثابت استفاده می کنند و روش هایی که برای گره لنگر قابلیت تحرک را در نظر می گیرند. اما معیار تقسیم بندی دیگر متمرکز یا توزیع شده بودن است. در روشهای متمرکز همه اطلاعات اندازه گیری شده در یک مرکز جمع آوری شده و محاسبات انجام می شود و پس از کشف مکان هر گره اطلاعات مکانی دوباره به گره ها ارسال می شود. در روش های توزیع شده هر گره با به دست آوردن اطلاعات محدود مکان خود را محاسبه کرده و از مکان سایر گره ها آگاه نیست.
معیار دیگری که برای طبقه بندی روش های مکان یابی استفاده می شود مبتنی بر فاصله یا غیر مبتنی بر فاصله بودن است. روش مبتنی بر فاصله از اطلاعات فاصله اندازه گیری شده استفاده می کند ولی روش غیر مبتنی بر فاصله تنها اطلاعات توپولوژیکی مثل اتصال یا عدم اتصال دو گره را نیاز دارد. طبقه بندی روش های مکان یابی از لحاظ تک گامی بودن یا چند گامی بودن نیز انجام می شود. روش تک گامی روشی است که در آن فقط فاصله مستقیم بین دو گره اندازه گیری می شود و پیغام مکان یابی اجازه طی کردن بیش از یک گام را ندارد. ولی روش چند گامی به گرهها اجازه می دهد تا پیغام مکان یابی را که از یک گره دریافت کرده اند به گره دیگری ارسال کنند. همچنین روشهای مکان یابی به دو گروه مبتنی بر آنتن جهت دار و غیر مبتنی بر آنتن جهت دار تقسیم می شوند. آنتن جهت دار در هنگام ارسال می تواند سیگنال را در یک جهت خاص تقویت کند و اجازه پخش شدن آن در سایر جهت ها را نمی دهد. همچنین آنتن هوشمند در هنگام دریافت سیگنال می تواند جهت دریافت آن را تشخیص دهد.
بکارگیری الگوریتم های هوشمند
الگوریتم بهینه سازی ازدحام ذرات یک روش کمینه سازی سراسری است که با استفاده از آن می توان با مسائلی که جواب آنها یک نقطه یا سطح در فضایD بعدی می باشد، برخورد نمود. در این چنین فضایی، مفروضاتی مطرح می شود و یک سرعت ابتدایی به آنها اختصاص داده می شود، همچنین کانال های ارتباطی بین ذرات در نظر گرفته می شود. سپس این ذرات در فضای پاسخ حرکت می کنند، نتایج حاصله بر مبنای یک تابع برازندگی پس از هر بازه زمانی محاسبه می شود. با گذشت زمان، ذرات به سمت ذراتی که دارای ملاک شایستگی بالاتری هستند و در گروه ارتباطییکسانی قرار دارند، شتاب می گیرند. علی رغم اینکه هر روش در محدوده ای از مسائل به خوبی کار می کند، این روش در حل مسائل بهینه سازی پیوسته موفقیت بسیاری از خود نشان داده است. جهت مدل کردن مساله با این الگوریتم مانند روش ژنتیکیک مجموعه جواب اولیه درست می کنیم سپس برای این مجموعه جواب جدید توسط تابع هدف مقدار برازندگی برای هر جواب از مجموعه جوابها محاسبه می شود چون این مجموعه جواب به صورت گسسته است بنابر این این مجموعه جواب باید به جواب های پیوسته تبدیل شوند لذا برای این کار با یک تابع تبدیل به جواب های پیوسته تبدیل می شوند. در این الگوریتم سپس برای هر جواب از مجموعه جوابها سرعت و موقیت آنها با بروز رسانی می شوند. در این روش چون از یک مقدار بهینه محلی و سراسری استفاده می شود لذا حرکت ذرات همیشه از یک ضریبی از مقدار سرعت حرکت اولیه خود ذره به اضافه ضریبی از مقدار سرعت حرکت بهینه محلی به اضافه یک ضریبی از مقدار حرکت ذره سراسری بروز رسانی می شوند لذا حرکت ذرات در این الگوریتم به سمت بهترین جواب ها حرکت می کنند. چون در این روش ذرات آزادانه حرکت می کنند لذا در تابع هدف جریمهای برای محدودیت مساله در نظر گرفته می شود. این مراحل را با یک تکرار مشخص برای مجموعه جواب ها تا جایی شرایط بهینه سازی محقق گردد ادامه پیدا میکنند.
مراحل الگوریتم بهینه سازی ازدحام ذرات(PSO):
١- تولید جمعیت اولیه.
۲- محاسبه برازندگی برای جمعیت.
٣. مقدار جاری را برابر ۱ قرار بده .
۴- سرعت ذره به صورت زیر بروز رسانی گردد:
سرعت جدید = W *سرعت اولیه + cl * rl *( بهترین موقیت محلی – موقیت جاری) + r2*c2*( بهترین موقیت سراسری – موقیت جاری).
۵- سرعت جدید باید در بازه بیشترین و کمترین سرعت تنظیم شود.
۶- مکان جدید ذره برابر است با مکان قبلی به اضافه سرعت جدید ذره.
۷- حرکت ذره باید در بازه بیشترین و کمترین حرکت تنظیم شود.
۸- مقدار حرکت جدید با تابع تبدیل به جوابهای گسسته تبدیل شود.
۹- مقدار برازندگی برای جواب جدید محاسبه شود.
۱۰- ضریب اینرسی – ضریب اینرسی *wdamp
11- اگر جواب حاصله از بهترین تجربه شخصی ذره بهتر نبود، برو به مرحله ۱۴.
۱۲- مقدار بهترین تجربه شخصی ذره با این مقدار بروز رسانی شود.
۱۳- اگر جواب حاصله از بهترین جواب سراسری بهتر بود، مقدار جواب سراسری با این مقدار بروز رسانی شود. ۱۴- به مقدار جارییکی اضافه کن.
۱۵- اگر مقدار جاری از اندازه جمعیت کمتر یا مساوی بود برو به مرحله ۴.
۱۶- بررسی شروط پایان و رفتن به مرحله ۴ و مقدار جاری را برابر ۱ قرار دادن، در صورت عدم برقراری شروط. ۱۷- انتخاب ذره با بهترین برازندگی به عنوان جواب.
۱۸- پایان.
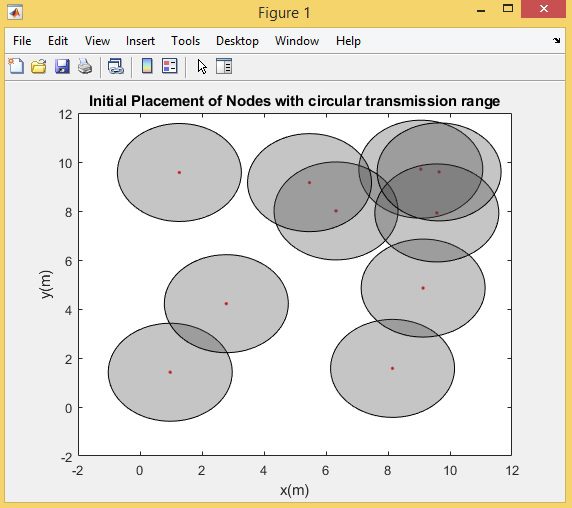
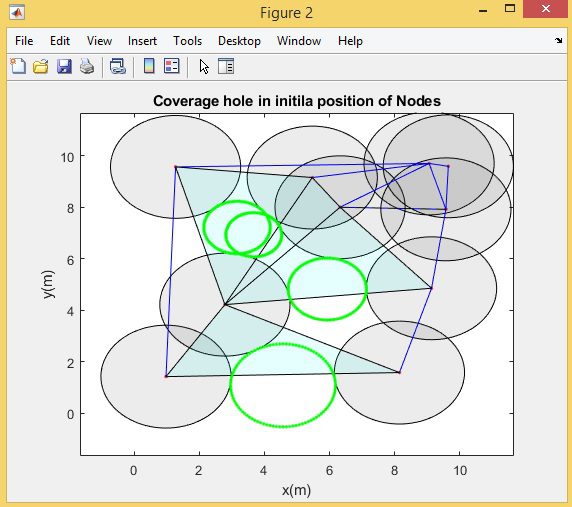
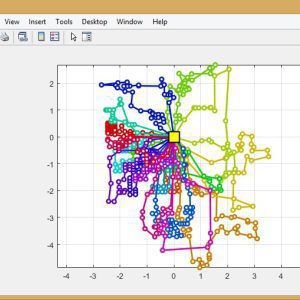
در این پروژه مکانیابی بهینه گره های حسگر بیسیم(WSN) با الگوریتم ازدحام ذرات(PSO) در نرم افزار متلب انجام شده است.
نتایج: