توضیحات
پروژه متلب میراگر جرمی تنظیم شده(TMD) برای ساختمان 20 طبقه
برای مدت سه دهه است که کاهش پاسخ سازه ها تحت اثر نیروهای دینامیکی،یکی از عناوین پژوهشی مهندسی عمران بوده است و تعداد زیادی از مفاهیم کنترل سازه ها در هر یک از این مقالات به کار برده شده اند. برای کنترل پاسخ لرزه ای سازه ها، روش های کنترل فعال، غیر فعال و یا نیمه فعال را می توان ذکر نمود که سیستمهای میراگرهای جرمی تنظیم شده (TMD) در هر سه نوع این روش های کنترلی به کار می روند.
ساختمان های بلند به دلیل انعطاف پذیری و نسبت میرایی کم به شدت در برابر زلزله و باد حساس می باشند. با یک طراحی خوب و تحت شرایطنرمال، پاسخ سازه در ناحیه امن باقی خواهد ماند؛ اما در شرایطی که سازه تحت بارگذاری هایی نظیر زلزله و بادهای شدید قرار گیرد هیچ تضمینی وجود ندارد که پاسخی در ناحیه امن داشته باشد. بدین منظور در چنین سازه هایی نیاز به وسایل کنترلی کار آمد، بسیار احساس می شود. میراگرهای جرمی تنظیم شده یکی از قابل اعتمادترین و مرسوم ترین وسایل کنترلی جهت استفاده در این نوع سازه ها می باشند.
انواع سیستم های کنترل کننده لرزه ای:
به طور کلی انواع سیستم های کنترل کننده لرزه ای بر حسب میزان انرژی ورودی برای به کار افتادن آنها دستهبندی می شود، این انرژی به کل سازه وارد نمی شود و فقط به سیستم کنترل کننده و اجزای آن وارد میشود؛ و بر این اساس چهار نوع سیستم کنترل کننده شامل کنترل کننده، غیرفعال، فعال، نیمه فعال و دوگانه وجود دارد.
سیستم کنترل کننده غیرفعال:
وسایلی که برای به کار افتادن نیاز به انرژی خارجی ندارند، وسایل کنترل غیر فعال نامیده می شوند. این سیستمها از این نظر که با قطع منبع انرژی، که در هنگام زلزله محتمل است، به کار خود ادامه می دهند، قابل اطمینان تر هستند. با توجه به اینکه این وسیله در داخل سازه بوده و منبع انرژی خارجی ندارد، هیچ گاه انرژی درونی سازه را تغییر نمی دهد همچنین این وسایل نیاز به هزینه نگهداری پایینی دارند.
البته اکثر وسایل کنترلی غیر فعال بعد از مرحله ای مانند لغزش، اصطکاک، تسلیم شدن فلز، تغییر شکل در اجسام یا مایعات ویسکوالاستیک شروع به کار می کنند و به همین خاطر می توان آنها را طوری طراحی نمود که بعد از سطح مشخصی به کار افتاده و در نیروهای جانبی کم فعالیت نداشته باشند.
دو قاعده اساسی مورداستفاده برای اتلاف انرژی وجود دارد:
١- تغییر انرژی جنبشی به حرارت، ۲- انتقال انرژی در طی مودهای لرزش.
تغییر انرژی جنبشی به حرارت توسط اصطکاک یا حرکت در مایع لزج و تسلیم شدن فلزات اتفاق می افتد که با تشکیل حلقه های پسماند انرژی را در سیکل بارگذاری جذب می کنند.
استفاده از وسایل کنترل غیر فعال هم در بهسازی سازه ها و هم در طراحی اولیه سیستم های سازهای مؤثر هستند، به عنوان مثال سازه به یک سختی اضافی نیاز دارد تا پاسخ دینامیکی سازه را جذب و انرژی لرزش را با تغییر فرکانس اولیه کاهش داده و به سازه در جلوگیری از تشدید کمک نماید، این وسایل می تواند جایگزین این سختی اضافی شوند. وسایل کنترل غیرفعال، در کاربرد صحیح که در زلزله های متوسط عمومی هستند، مزایای بسیاری دارند. از جمله آنها می توان به عدم نیازمندی به منبع انرژی خارجی، هزینه کم ساخت، نصب و نگهداری اشاره نمود. بعلاوه در کم کردن هزینه کلی ساختمان، به علت فراهم کردن سختی اضافی، مؤثر هستند.
اما این نوع سیستم کنترل نیز دارای عیب هایی می باشد. سازگاری وسایل غیرفعال جای نگرانی دارد به علت اینکه سیستم های غیر فعال نمی توانند به صورت آنی اصلاح شوند و همچنین فیزیک سیستم و تخمین منطقی بارهای طراحی برای سختی هر سیستم کنترلی غیر فعال به صورت بحرانی انجام می شود. حتی اگر وسایل به صورت ایده آل طراحی شوند، باز هم برای بارگذاری دینامیکی خاصی مؤثر هستند؛ و در نتیجه ممکن است این وسایل پاسخ مود اول را کاهش دهند؛ اما نمی توانند پاسخ های مودهای دیگر را کاهش دهند و این معایب، موجب به وجود آمدن و استفاده از انواع دیگر سیستم های کنترلی گردیده است.
وسایل کنترل غیرفعال را می توان به دسته های زیر تقسیم بندی کرد:
1- میراگرهای جرمی تنظیم شده ۲- میراگرهای مایع تنظیم شده(تلاطمی و ستونی مایع)، 3-میراگرهای مایع – ویسکوز(خطی و غیرخطی) ۴- میراگرهای تسلیمی فلزی ۵- میراگرهای ویسکوالاستیک۶- میراگرهای آلیاژی با تغییر شکل حافظه ای۷- میراگرهای اصطکاکی.
سیستم کنترل کننده فعال:
وسایل کنترل فعال به وسایلی گفته می شوند که مقدار قابل توجهی انرژی برای به کار افتادن نیاز دارند تا نیروی کنترل سازه را فراهم کنند. این وسایل از پاسخ های اندازه گیری شده، برای محاسبه نیروی کنترل دلخواه استفاده می کنند. متأسفانه به علت توانایی آنها در اضافه کردن انرژی به سازه به راحتی قادر به ناپایدارکردن سازه هستند. توانایی آنها در تعدیل شرایط بارگذاری و کنترل مودهای مختلف لرزش بیشتر از وسایل کنترلی دیگر می باشد. همچنین چون ممکن است در هنگام زلزله منبع آنها قطع گردد، قابلیت اطمینان آنها کمتر از وسایل کنترلی دیگر است.
سیستم کنترل کننده ترکیبی(دوگانه)
معنی متداول كلمه(کنترل ترکیبی) به صراحت این مفهوم را که این سیستم ترکیبی از سیستم های کنترل فعال و غیر فعال است، می رساند. در یک سیستم کنترل ترکیبییا پیوندی ، ممکن است از یک سیستم کنترل فعال به عنوان مکمل و بهبود بخش کارایی سیستم کنترل غیر فعال یا برعکس از یک سیستم کنترل غیرفعال جهت کاهش انرژی مورد نیاز در یک سیستم کنترل فعال استفاده شود. به عنوان مثال می توان به ساختمانی اشاره کرد که با یک سری میراگرهای ویسکوالاستیک توزیع شده و یک میراگر جرم فعال که در طبقه بالای آن قرار دارد، تجهیز شده است. باید توجه شود که تنها تفاوت اصلی بین کنترل فعال و ترکیبی در اغلب موارد، میزان انرژی خارجی مورد نیاز سیستم است. بنابراین می توان گفت که سیستم های کنترل هیبریدی در واقع باعث کاهش برخی از محدودیت های موجود در هر یک از سیستم های کنترل اصلی می شوند. در نتیجه این سیستم ها از سطح عملکرد بالاتری برخوردارند. علاوه بر این در صورتی که بعضأ منبع انرژی با مشکل مواجه شود، مولفه غیر فعال کنترل پیوندی همچنان به وظیفه خود عمل نموده و به حفاظت از سازه می پردازد.
از انواع سیستم های کنترل ترکیبی می توان دو دسته زیر را نام برد:
1- میراگرهای جرمیترکیبی (رایج ترین نوع می باشد) ۲- سیستم های جداساز پایه ترکیبی (به آن، جداساز پایه هوشمند نیز گفته می شود).
سیستم کنترل کننده نیمه فعال:
این وسایل مانند وسایل کنترل پیوندی بین دو حالت فعال و غیر فعال قرار می گیرند. این وسایل نمی توانند به سازه انرژی وارد کنند، اما خواص مکانیکی دارند که می تواند برای بهبود عملکرد آنها تنظیم شود. این تنظیم بر اساس پاسخ های اندازه گیری شده بوده و نیروی خارجی تنها برای تغییر و تنظیم خواص وسیله مانند میرایی و سختی بوده و برای تولیدیک نیروی کنترلی نیست. از مزایای این وسیله نیازهای کم انرژی آن و عملکرد بهتر نسبت به میراگرهای غیر فعال و تطبیق پذیری آن مانند میراگرهای فعال است. از طرفی این وسیله در هنگام قطع منبع انرژی به صورت غیر فعال به کار خودش ادامه می دهد و در نتیجه قابلیت اطمینان آن بالا است.
از وسایل کنترل نیمه فعال می توان موارد زیر را نام برد:
1- میراگرهای روزنه – متغير ٢- میراگرهای اصطکاک – متغير ۳- میراگرهای مایع تنظیم شده قابل کنترل ۴- میراگرهای سیال قابل کنترل(در دو نوع جریان یابنده الکتریکی و جریان یابنده مغناطیس)، ۵- میراگرهای ضربه ای نیمه فعال۶- میراگرهای جرمی نیمه فعال.
میراگرها:
بحث جدیدی که در سال های اخیر میان مهندسین طراح سازه مطرح شده است طراحی نوع جدیدی از سازه است که شامل یک سیستم مستهلک کننده لرزه ای باشد که فقط در مقابل ارتعاشات مختلف ناشی از زلزله عمل نموده و در تحمل بارهای استاتیکی هیچ نقشی نداشته باشد، که این مسئله باعث ساده سازی پیش بینی رفتار سازه تحت بارگذاری لرزه ای می شود. با تعریف اعضا جدیدی در سازه با نام میراگرها که عامل اتلاف انرژی لرزه ای هستند و به کار بستن آنها می توانیمیک سازه بهینه شده داشته باشیم که در مقابل انواع بارهای دینامیکی ناشی از زلزله رفتاری مناسب و مطلوب از خود ارائه می دهد.
روش کنترل ارتعاشات مقوله جدیدی در روند بهسازی سازه ها و طراحی ساختمان های مقاوم در برابر بارهای دینامیکی است. این تفکر باعث کنترل پاسخ سازه تحت بارهای دینامیکی شده و بدون اینکه نیاز به مقاوم سازی تک تک عناصر مقاوم سازه ای باشد با تعبیه وسایل و تجهیزات مناسبی در ساختمان باعث کاهش تغییر مکان و بهبود پاسخ دینامیکی سازه می شوند.
یکی از روش های کنترل ارتعاشات سازه ها تحت تاثیر بارهای لرزه ای، استفاده از وسایل اتلاف انرژییا میراگرها است. کاربرد این وسایل در طراحی ساختمان های جدید و یا در مقاوم سازی ساختمان های موجود به سادگی امکان پذیر است.
این سیستم ها با جذب و استهلاک درصد بالایی از انرژی ورودی به سازه، شرایط ایمن و پایداری را نسبت به سازه های مشابه فراهم می کنند، میراگرها به جای افزایش شکل پذیری عناصر سازهای تکیه بر مستهلک نمودن انرژی لرزه ای دارند. امروزه استفاده از میراگرها به عنوان روشی اقتصادی و عملی برای افزایش مقاومت دینامیکی سازهها قابل ذکر است، بنابراین استفاده از آن جهت مقاوم سازی ساختمانها و بناهای متعارف نیز امکان پذیر است.
می توان سه دسته میراگر تعریف نمود:
١- میراگرهای متناسب با انرژی جنبشی و به عبارتی وابسته به شتاب، مانند میراگرهای جرمی
٢- میراگرهای متناسب با انرژی ویسکوز و به عبارتی وابسته به سرعت، مانند میراگرهای ویسکوز
۳- میراگرهای متناسب با انرژی هیسترزیس و به عبارتی وابسته به تغییر مکان، مانند میراگرهای تسلیمی و میراگرهای اصطکاکی.
میراگرهای ویسکوالاستیک و ویسکو پلاستیک، ترکیبی از حالت ویسکوز و حالت تسلیمی بوده و بنابراین هم وابسته به سرعت و هم وابسته به تغییر مکان هستند، اما به طور کلی آنها را وابسته به سرعت فرض می کنیم. سه مورد از میراگرها در هیچ کدام از این طبقه بندی ها جای نمی گیرند که این میراگرها عبارت از میراگرهای آلیاژی با تغییر شکل حافظه ای (در حالت فوق الاستیک)، میراگرهای فنر اصطکاکی و وسایل میرایی دوباره ذخیره کننده نیرو، هستند.
میراگرهای جرمی تنظیم شده(TMD):
این نوع میراگر شامل اجزای زیر می باشد:
1-جرم: می تواند هر چیزی شامل بتن، سرب، آب و … باشد که معمولا در طبقات بالای ساختمان قرار می گیرد.
٢- فنر: می تواند هر نوع سیستم فنری حلقه ای، بادی و … باشد.
٣- میراگر: که می تواند میراگر ویسکوز باشد. میراگرهای جرمی تنظیم شده جدید تکیه گاه هایی دارند که خود وظیفه فنر و میراگر را به خوبی انجام می دهند.
به دلیل اینکه فرکانس این میراگرها با فرکانس طبیعی سازه تنظیم شده است، به این وسایل میراگرهای جرمی تنظیم شده می گویند. این میراگر تحت بار جانبی سازه حرکت می کند. می توان گفت جرم میراگر نسبت به یک نقطه بیرون ساختمان ساکن است. هنگامی که مثلا ساختمان به سمت چپ حرکت می کند، جرم در جای خودش مانده و ساختمان را به سمت راست می کشد و عمل بالعکس نیز انجام می شود. اگر فنر دوطرفه باشد در واقع یکی ساختمان را می کشد و یکی ساختمان را هل می دهد.
اگر یک دوربین در کف ساختمان باشد، حس می شود که ساختمان ثابت است و میراگر حرکت می کند. جرم مربوطه به دیوارهای ساختمان متصل می باشد. میراگرهایی در انتهای فنرها قرار دارند که وظیفه آنها انتقال نیروی میراگر جرمی است و اثر ضربه و نوسانات بعد از ارتعاش توسط میراگرهای متصل دیگر خنثی می شود. در ساختمان های بلند که نیروی باد مؤثرتر است، میراگرهای جرمی تنظیم شده بیشتر کاربرد دارند. برای کارکرد بهتر میراگر آن را در طبقات بالاتر ساختمان قرار میدهند و هر چه که میراگر بالاتر باشد به جرم کمتری از آن نیاز است. جرم میراگرها معمولا از جنس بتن، سرب، فولاد و یا آب است.
این نوع میراگرها به طور وسیعی در موارد زیر کاربرد دارند:
1-سازه های با دهانه های عریض (پل ها، جایگاه های تماشاچیان، پله های پیاده رو، سقف های استادیوم و…)
۲- سازه های بلند و باریک (دودکش ها، پله های بلند، برج های تلویزیونی و ساختمان های بلند و به طور کل تمام سازه هایی که تمایل به ارتعاش با دامنه های بالا در یکی از شکل های مود اصلی خود را دارند و ممکن است توسط بار زلزله، دویدن افراد و … فراهم شود)
3-کف های کارخانه ها که توسط ارتعاش دستگاه ها تحریک می شوند مثل غربال ها، دستگاه های گریز از مرکز، فن ها و
4-کشتی ها که در فرکانس اصلی شان با موتورهای اصلی و حتی حرکات کشتی تحریک می شوند.
هدف از به کار گیری یک میراگر جرمی تنظیم شده در داخل یک سازه ذاتا مشابه با همان میراگرهای فلزی و تجهیزات اتلاف انرژی است، یعنی کاهش تقاضای اتلاف انرژی در اعضای سازه اصلی که تحت اثر نیروهای خارجی است. در این حالت این کاهش تقاضا توسط انتقال مقداری از انرژی به میراگر جرمی تنظیم شده (TMD) است که ساده ترین شکل آن شامل سیستم جرم فنر ضربه گیر، مهار یا متصل شده به سازه اصلی است.
انواع میراگرهای جرمی تنظیم شده به دو دسته میراگر جرمی تنظیم شده انتقالی و میراگر جرمی تنظیم شده پاندولی تقسیم می شوند:
میراگر جرمی تنظیم شده انتقالی:
در میراگر جرمی تنظیم شده انتقالی جرم بر روی تکیه گاههای غلتکی قرار می گیرد تا اجازه جابجایی جانبی نسبت به طبقه را داشته باشد. فنرها و میراگرها بین جرم و تکیه گاه های ثابت عمودی قرار می گیرند. از جمله عیوبی که می توان برای این میراگر نام برد:
- مکانیسم های پیچیده ای برای غلتک و اجزای میراگر دارند. • دارای جرم زیادی می باشند. • فضای زیادی اشغال می نمایند. • قیمت بالایی دارند و اقتصادی نیستند.
در میراگرهای جدید برخلاف غلتک مکانیکی که فقط امکان بکارگیری در یک جهت را دارا هستند از غلتک های لاستیکی استفاده می شود که امکان عملکرد در جهت های مختلف را دارا می باشند و همانند فنرهای برشی عمل می کنند. همچنین به جای میراگر از لاستیک های قیری که توانایی میراگرهای ویسکوالاستیک را دارا هستند، استفاده می شود.
میراگر جرمی تنظیم شده پاندولی:
مسائل و مشکلات ایجاد شده در رابطه با غلتک ها با کمک تقویت های کابلی جرم که به سیستم اجازه رفتاری مانند یک پاندول را می دهند قابل حل است. حرکت طبقه، پاندول را تحریک می کند و جابجایی نسبی پاندول یک نیروی افقی در جهت خلاف حرکت طبقه ایجاد می نماید. در عمل، این نوع میراگرها دارای محدودیت هایی جدی هستند. چون پریود بستگی به L دارد، طول مورد نیاز بزرگ و ممکن است از ارتفاع طبقه بیشتر باشد. برای نمونه، طول برای پریود۵ ثانیه 6.2 متر است در حالی که ارتفاع طبقه معمولا بین۴ الی۵ متر خواهد شد. برای حل این مشکل از اتصال صلب داخلی استفاده می نمایند. اتصال صلب داخلی، حرکت تکیه گاه را برای پاندول بزرگ می کند لذا در فاز میراگر حرکت می کند و دارای همان دامنه جابجائی است.
میراگر مایع تنظیم شده:
قاعده اساسی میراگرمایع تنظیم شده شبیه میراگر جرمی تنظیم شده می باشد به خصوص اینکه جرم ثانویه متحرک به صورت میراگر سیال به سیستم سازهای اولیه معرفی شده است. از این جهت تنظیم شده است که فرکانس مایع با فرکانس حرکت سازه برابر است و به آن میراگر مایع تنظیم شده گفته می شود. وزن به عنوان نیروی بازدارنده عمل می کند و اتلاف انرژی از عمل ويسکوز بین لایه های مرزی مایع به دست می آید. میراگرهای مایع تنظیم شده برای اولین بار در اوایل قرن بیستم برای کنترل ارتعاشات ناشی از امواج دریا در کشتی های اقیانوس پیما استفاده شد و سپس، در نیمه دوم قرن بیستم برای کنترل نوسانات و جنبش های آزاد با دوره تناوب بالا در ماهواره ها به کار رفت. از اواسط دهه ی۱۹۸۰ میراگر مایع تنظیم شده برای کنترل ارتعاشات سازه های عمرانی به کار گرفته شد. نحوه کار میراگر بدین ترتیب است که تعدادی مخزن مستطیلی یا استوانه ای با آب داخل آن در قسمت بالای سازه نصب می شود و تلاطم مایع درون این مخازن انرژی ارتعاشی وارد به سازه را در هنگام زلزله یا تندباد مستهلک می کند. حرکت افقی مخزن حرکت موجی مایع درون آن را ایجاد می کند. میراگرهای جرمی مایع تنظیم شده به دو دسته تقسیم می شوند: 1- میراگر ستون مایع تنظیم شده که با یک ظرف U شکل به خصوصی است که با مایع پر می شود، حرکت مایع در این ستون ها مانند جرم متمرکز در میراگرهای جرمی عمل می کند. عملکرد این میراگر با به کار گیری مخازن تنظیم فشار در روی ستون ها بهتر می شود.
٢- میراگر موجی مایع(TSD) که خود به دو دسته کم عمق و عمیق تقسیم می شود و می تواند به شکل مخازن مستطیلی و یا مخازن استوانه ای باشد. به محض حرکت سازه ستون مایع شروع به نوسان می کند و شروع به جذب لرزش های ساختمان می کند. جذب کننده های لرزشی دینامیکی برای کاربرهای کشتی رانی توسط فرهام به عنوان شروع کننده این کار پیشنهاد شد. برای کاربردهای مهندسی عمران اولین بررسی ها در اواسط سال ۱۹۸۰ انجام شد. برخلاف میراگرهای جرمی تنظیم شده پاسخ میراگرهای مایع تنظیم شده بسیار غیر خطی است. موج زدن های مایعیا حرکت مایع از روزنه ها معمولا پدیده ای بسیار غیر خطی می باشد. پاسخ سازه اولیه با میراگرهای مایع تنظیم شده وابسته به دامنه بوده و حتی برای سازه های اولیه، سازه هایی که به صورت الاستیک خطی عمل می کنند، گزارش های تحقیقات انجام شده بر غیر خطی بودن رفتار میراگرهای مایع تنظیم شده اشاره دارند.
اتلاف انرژی در هر سیکل میراگرهای مایع تنظیم شده بستگی شدید به فرکانس تحریک آن دارد. برای فرکانس هایی در نزدیکی فرکانس طبیعی اتلاف انرژی به صورت قابل توجهی بالاتر از بقیه دیده شد. رفتار دینامیکی غیرخطی میراگرهای مایع تنظیم شده بیشتر بر روی سیستم یک درجه آزادی بررسی شده است. با این وجود پاسخ سیستم یک درجه آزادی نیز برای دامنه لرزش ستون مایع غیر خطی است. غیر خطی بودن بیشتر شامل قسمت میرایی به علت اتلاف انرژی ناشی از آشفتگی جریان است. به علت کمبود مدل های ساده معقولانه برای توصیف رفتار دینامیکی میراگرهای مایع تنظیم شده، تاکنون روش طراحی قابل قبولی ایجاد نشده است.
اگر چه اثر میراگرهای مایع تنظیم شده در کنترل ارتعاشات ایجادشده توسط باد بالاتر از ۷۰ درصد بوده است، اما کاربرد آنها از میراگرهای جرمی تنظیم شده کمتر بوده و در کل آنها کم اثر تر از میراگرهای جرمی تنظیم شده شناخته شده اند، ولی میراگرهای مایع تنظیم شده دارای مزایایی چون هزینه کم، آسانی نصب و تنظیم فرکانس مایع می باشد، اما به دلیل مشکلات بالا و اثر غیر خطی شدید هنوز بسیار گسترش پیدا نکرده است.
میراگر ویسکوز:
میراگرهای ویسکوز اولین بار در نیمه پایانی قرن ۱۹ برای خنثی سازی اثرات ضربه توپ ها در کشتی استفاده شد. در نیمه اول قرن بیستمیک کمپانی اتومبیل سازی به صورت گسترده ای استقامت آنها را افزایش داده و آنها را برای نیازهای سیستم های تعلیق وسایل نقلیه استفاده کرد. در طی جنگ سرد میراگرهای ویسکوز برای جداسازی سیلوها و سنگرهای پرتاب موشک استفاده شد، به علاوه استفاده و توسعه آن برای توپ های بزرگ و کشتی جنگی افزایش یافت. در پایان سال ۱۹۸۰ نوع کوچکی از این میراگرها به صورت گسترده ای توسط پیمانکاران نظامی برای کاربرد بخش غیرنظامی استفاده شد. پیمانکاری نظامی به نام تیلور، آزمایش هایی را در همکاری با مرکز ملی مهندسی زلزله در دانشگاه نیویورک در بوفالو انجام داد و بر روی تطبیق پذیری میراگرهای ویسکوز در کاربردهای ساختمانی برای مقابله با حرکت ناشی از باد و زلزله تحقیق کرد.
از آن پس در بیش از ۱۱۰ کاربرد سازهای بزرگ میراگرهای ویسکوز به کار گرفته شد. ایده این دسته از میراگرها نیز همان طور که ایده میراگرهای اصطکاکی از ترمز اتومبیل گرفته شده است از اتومبیل سرچشمه می گیرد. سیستم تعلیق اتومبیل از یک فنر و یک کمک فنر (میراگر) استفاده می کند که در تعامل با یکدیگر، ضربات وارده به اتومبیل از سوی زمین را جذب و انرژی آنها را اتلاف می کند. اگر ستون هاییک سازه را به عنوان فنر در نظر بگیریم، در واقع با ایجاد کمک فنر (میراگر) در کنار آنها می توانیم انرژی وارده به سازه در اثر زلزله را اتلاف کنیم.
دو نوع میرایی در هنگام ورزش برای وسایل جاذب انرژی وجود دارد. وسایل کنترل تسلیمی و اصطکاکی جزء انواع هیسترزیس هستند، آنها دارای نیروی محدودی و وابسته به نیرو هستند و بر پایه سرعت تحریک، نیروی داخلی شان افزایش پیدا نمی کند. از طرف دیگر میراگرهای ویسکوز، محدود به نیرو نیستند و نیروی داخلی آن ها وابسته به سرعت تحریک است.
یک میراگر ویسکوز تنها از چند بخش تشکیل شده است. قسمت اساسی آن، یک پیستون است که روزنه هایی در قسمت انتهایی دارد و با حرکت رفت و برگشتی در داخل سیلندر، مایع از روزنه ها عبور کرده و سرعت مایع تولید کننده نیرو می باشد. چند مزیت مهم برای استفاده از میراگرهای ویسکوز وجود دارد. میراگر ویسکوز یک وسیله مهروموم شده است و این موجب حساسیت کمتر آن به خطرات جوی می شود که میراگرهای اصطکاکی باید تحمل کنند. در نهایت عملکرد میراگر ویسکوز تقریبا مستقل از حرارت است و معادله میرایی ویسکوز مشابه برای همه سطوح فرکانس معتبر است، این وسیله را آسان تر برای مدل سازی دقیق بیش از میراگر ویسکوالاستیک ساخته است. میراگر مایع لزج قابلیت طراحی برای سازه های جدید و سازه های ساخته شده را دارد و با توجه به کوچکی اندازه این قطعات وقتی به سازه اضافه می شوند، تغییری در شکل سازه به وجود نمی آورند؛ این مسئله در بازسازی ابنیه تاریخی بسیار حائز اهمیت است. به علت فشردگی کم سیال ویسکوز، شروع به کار کردن با ضربه ای در میراگر ویسکوز همراه است و به همین دلیل میراگرهای ویسکوز در تغییر شکل های کوچک سازه ای مانند سیستم صلب عمل می کنند.
میراگرهای اصطکاکی:
این نوع میراگر بر اساس مکانیزم اصطکاک بین اجسام صلب نسبت به یکدیگر عمل می کند. در حقیقت اصطکاک یک مکانیزم عالي اتلاف انرژی است و با تحقیقات نسبتا خوبی که در سال ۱۹۸۰ توسط پال و همکاران صورت گرفت(بر اساس شبیه سازی ترمز ماشین توسعه میراگرهای اصطکاکی غیر فعال جهت بهبود پاسخ لرزه ای سازه ها شروع گردید، طرحی جدید که بیانگر نسل جدید سیستم های اتلاف انرژی غیر فعال بود. در این سیستم میرایی توسط اصطکاک خطی موجود میان ورقه های فلزی روی هم سوار شده به وجود می آید. این دسته از میراگرها به دلیل اینکه طول عمری تقریبا برابر با اعضا سازه دارند، مشکل تعویض و خرابی را نیز تا حدود قابل قبولی مرتفع کرده اند.
مصالح گوناگونی برای سطوح الغزنده استفاده شدند. از آنها می توان به لایه های ترمز روی فولاد، فولاد روی فولاد، فولاد روی برنج و در اتصالات پیچ شده لغزنده به ترکیب گرافیت با برنز روی فولاد ضد زنگ و دیگر آلیاژهای فلزی نام برد. انتخاب فلز پایه برای میراگر اصطکاکی بسیار مهم است. اغلب خوردگی می تواند ضریب اصطکاک فرض شده را برای عمر موردنظر وسیله کاهش دهد. در حقیقت، آلیاژ فولاد کم کربن زنگ زده و می پوسد و خواص سطح مشترک آنها در طی زمان تغییر می کند و از طرفی برنج و برنز در زمان تماس با آلیاژ کم کربن، میزان خوردگی را افزایش می دهند. در مقایسه فولاد ضد زنگ در تماس با برنج خوردگی اضافی نگران کننده ای را نشان نداد و از این جهت این مواد برای استفاده در میراگرهای اصطکاکی مناسب هستند.
تمام میراگرهای اصطکاکی موجود در واقع به یک صورت عمل می کنند. به این صورت که یک قسمت به صورت ثابت قرار گرفته و قسمت دیگر به صورت دینامیکی بر روی آن می لغزد. این لغزش در سطح مشخصی از نیرو اتفاق افتاده و بر اساس قانون اصطکاک کلمب حرکت می کند. تا سطح مشخصی از نیرو هیچ حرکتی روی نمی دهد، اما بعد از این سطح لغزش و حرکت آغاز می شود. ترکیب بندی و نحوه قرار گرفتن این سطوح لغزش موجب ایجاد میراگرهای اصطکاکی مختلف می شود. از جمله اشکال پیچیده ترکیب می توان به میراگر اصطکاکی پال اشاره کرد. مدل هیسترزیس ماکروسکوپیک میراگرهای اصطکاکی توسط ضریب ثابت کلمب می باشد، اما در حالت میکروسکوپی این حالت ممکن است اعتبار چندانی نداشته باشد که بیشتر مربوط به حالت های جزئی مکانیکی بوده و از بحث این مجموعه خارج است.
این نوع میراگرها در دسته میراگرهای هیسترزیس قرار می گیرند. از جمله مزایای میراگرهای اصطکاکی می توان به مدل سازی نسبتا ساده آنها اشاره کرد. اصطکاک منبع اتلاف انرژی ارزان تری نسبت به سایر منابع است و این ساخت میراگرهای اصطکاکی را ارزان تر می سازد. اما معایبی دارند از جمله این که میراگرهای اصطکاکی اغلب در معرض هوا هستند و ممکن است زنگ بزنند یا خیس شوند و خواص لغزشی آنها تغییر کند. همچنین به حرارت محیط نیز باید توجه شود.
میراگر اصطکاکی پال:
این سیستم اولین بار توسط دو کانادایی در سال ۱۹۸۲ معرفی شد. این سیستمیک مکانیزم با سطوح اصطکاکی لغزشی در محل تقاطع بادبندها است. این میراگرها طوری طراحی می شوند که در برابر بارهای سرویس معمولی و زلزله های متوسط نلغزند. یعنی این که از پیش وسیله را برای نیروی خاصی طراحی می کنند که تا آن مقدار نیرو، وسیله وارد عمل نشود و سازه به صورت ارتجاعی باقی بماند اما بعد از این نیروی خاص لغزش اتفاق می افتد درنتیجه میراگر اصطکاکی انرژی زیادی را جذب می کند و پریود طبیعی سازه را تغییر می دهد.
میزان انرژی مستهلک شده توسط این میراگر اصطکاکی برابر حاصل ضرب بار لغزش در میزان جابجایی تمامی میراگرها است. اگر میزان بار موردنیاز برای لغزش خیلی زیاد باشد، میزان انرژی مستهلک شده تقریبا صفر می باشد، چون هیچ لغزشی روی نمی دهد و در این حالت سازه مانند قاب خمشی مهاربندی شده عمل می کند. از طرفی اگر میزان بار موردنیاز برای لغزش خیلی کم باشد، لغزش زیادی روی خواهد داد اما به علت کمی بار لغزش، باز هم میزان انرژی تلف شده بسیار کم است و سازه بیشتر شبیه به یک قاب خمشی مقاوم رفتار می کند. در بین دو حالت حدی بار لغزش بهینه وجود دارد که از یک سری تحلیل های دینامیکی غیر خطی به وجود می آید.
میراگر اصطکاکی دورانی:
از این میراگر با عنوان میراگر اصطکاکی جدید نیز نامبرده می شود و می تواند به صورت یک و چند واحده برای نیروی اصطکاکی مورد نظر استفاده شود. مهاربندهای مورد استفاده به همراه این میراگر دارای نیروی پیش کشیدگی اویلر هستند، تا از کمانش مهارها جلوگیری کند. میرایی در کلیه این میراگرها از طریق ایجاد اصطکاک مابین ورقه های متصل به پین بوجود می آیند.
میراگرهای فلزی تسلیمی:
با دانستن ساختمان کریستالی فلزات مختلف رفتار میرایی این فلزات در شرایط بارگذاری تناوبی بررسی می شوند و خواص میرایی مطلوب در محدوده قبل از نقطه تنش تسلیم مشاهده می شود. با فرم دادن یک قطعه فلز به حالتی که در بارگذاری دینامیکی سازه رفتار میرای از خود نشان دهد (عموما به شکل مثلث متساوی الساقین) و قرار دادن آن در محل اتصال اعضاء سازه به یکدیگر از این خاصیت به نحو مطلوب در اتلاف و پراکنده سازی انرژی زلزله استفاده می شود. میراگرهای فلزی تسلیمی وسایل فلزی هستند که می توانند انرژی را در یک زلزله در اثر تغییرات غير الاستیک فلزات تلف کنند. این میراگرها در حقیقت در حالات خمشی، پیچشی، محوری و یا برشی تسلیم می شوند. اولین عقیده در استفاده از میراگرهای هیسترزیس به منظور مقاومت سازه ها در هنگام زلزله توسط کار نظری کلی و همکاران در سال ۱۹۷۲ شروع شد. این میراگرها در هنگام بارگذاری جاری شده و در نتیجه موجب مستهلک نمودن مقدار زیادی از انرژی ورودی به سازه می گردند. میراگرهای فلزی معمولا از جنس فولاد ساخته می شوند و طراحی آن ها طوری صورت می گیرد که بر اثر ارتعاش سازه، این میراگرها دچار تغییر شکل شده و انرژی را تلف می نمایند. اولین کارها در زمینه به کار گیری میراگرهای فلزی در سازه به منظور جذب انرژی با کارهای آزمایشگاهی بین سال های۱۹۷۲ تا ۱۹۷۵ شروع شد.
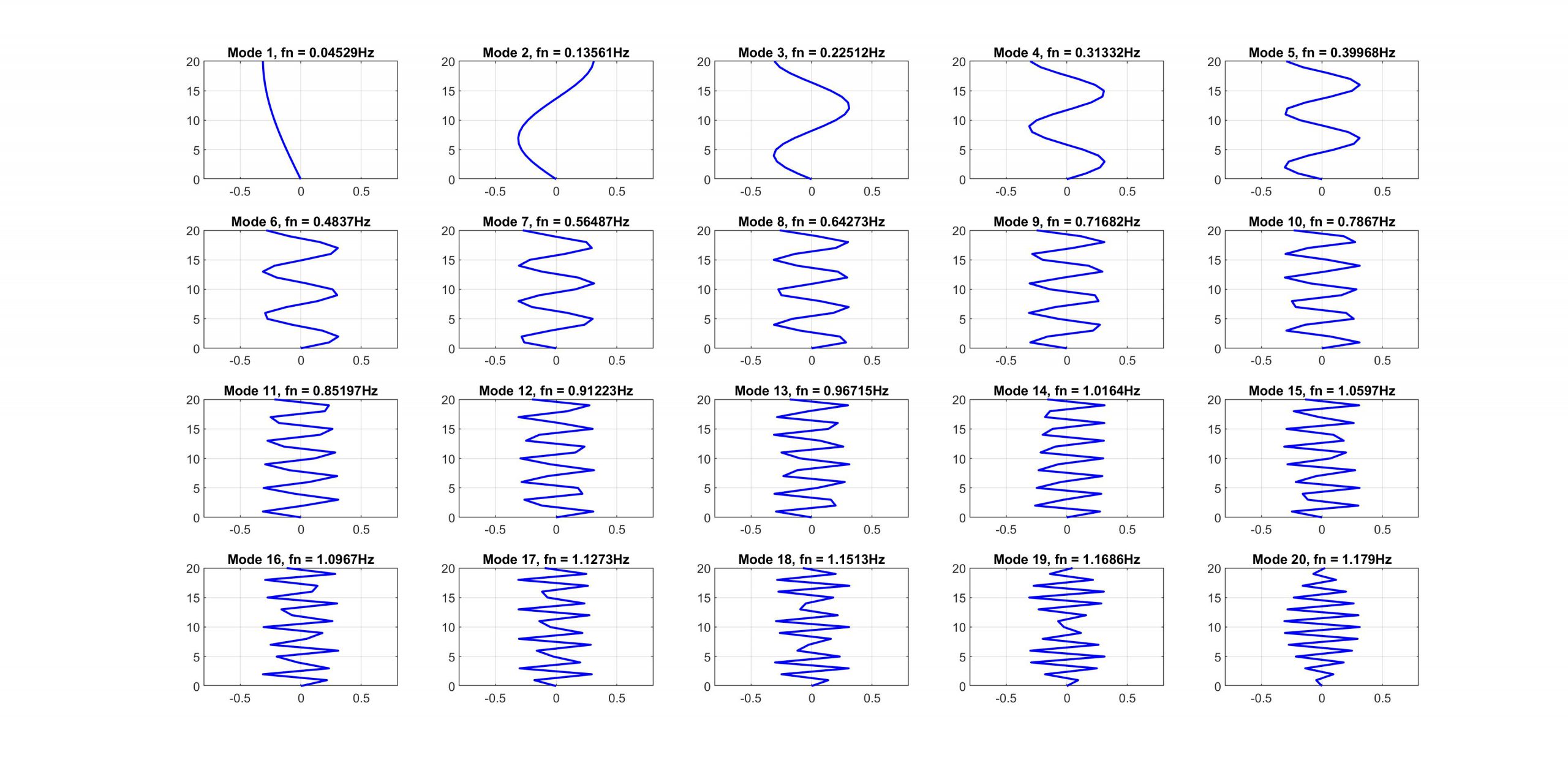
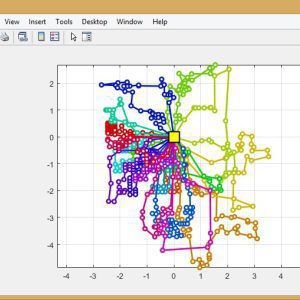
در این پروژه برنامه نویسی میراگر جرمی تنظیم شده(TMD) برای یک ساختمان 20 طبقه در نرم افزار متلب انجام شده است.
نتایج آنالیز مودال- 20 شکل مود و فرکانس های طبیعی آنها