توضیحات
پروژه متلب کنترل گشتاور مستقیم(DTC) در کنترل موتور القایی سه فاز با روشهای PID و کنترل مد لغزشی(SMC) و مدولاسیون پهنای پالس و بردار فضایی( SVPWM)
امروزه به خاطر پیشرفت در عناصر نیمه هادی قدرت و به طبع پیشرفت در روش های کنترل درایوهای سرعت متغیر، ماشین های القایی (IM) جایگزین ماشین های جریان مستقیم(DC) در صنعت شده اند. در دهه اخیر روش کنترل مستقیم گشتاور (DTC) بر خلاف روش های کنترل برداری، به خاطر سادگی ساختار، پیاده سازی آسان، همراه با پاسخ دینامیکی سریع مورد توجه فراوان قرار گرفته است. DTC روش کنترلی است که موتور و مبدل را به صورت یک سیستم یکپارچه در نظر می گیرد و در یک رفتار بهینه هر دو را کنترل می کند. DTC کلاسیک (CDTC) دارای دو مشکل اساسی: الف) ریپل بالای شار و گشتاور و ب) فرکانس کلید زنی متغیر است.
روند تاریخی کنترل ماشین هایAC (القایی)
به واسطه ساختار غیرخطی با تزويج بالا، کنترل کارآمد IM یک چالش به حساب می آید. از لحاظ اقتصادی بیشتر روش های کنترل سرعت IM با استفاده از مبدل های فرکانس پیاده سازی شده اند. عملکرد ایده آل مورد نیاز از مبدل های فرکانس – تغذیه کننده درایوIM را می توان، به صورت زیر بیان کرد:
– پاسخ سریع گشتاور و شار
-حداکثر گشتاور خروجی موجود در محدوده وسیعی از ناحیه عملکردی سرعت.
-فرکانس کلید زنی ثابت.
– PWM ولتاژ تک قطبی
– مقاوم در برابر تغییرات پارامتر موتور
-عملکرد چهار ربعی.
مشخصات ذکر شده به استراتژی کنترلی به بکار برده شده، بستگی دارد. از جمله مشخصات یک استراتژی کنترلی خوب می توان به الگوریتم کنترلی ساده و عملکرد صحیح سیستم با ابعاد کنترلی کوچک در جهت کاهش قیمت تولید نهایی اشاره کرد. این دسته بندی به دو گروه کلی تقسیم بندی می شود: عددی ، برداری.
روش های عددی در پیاده سازی ساده می باشند. شناخته شده ترین روش عددی در صنعت، کنترل V/f ثابت است. ولی در مقابل سادگی، کارایی بالایی را مهیا نمی کند. روش های کنترل برداری علاوه بر کنترل اندازه ولتاژ و فرکانس (همانند روش های عددی)، موقعیت لحظه ای بردارهای ولتاژ، جریان و شار را کنترل می کنند که به طور چشم گیری رفتار دینامیکی درایو را بهبود می بخشد. به هرحال، به دلیل ساختار غیرخطی موتور القایی، بین گشتاور الکترومغناطیسی و شار موتور تزویج وجود دارد. از این حیث چندین روش برای مجزا نمودن گشتاور و شار پیشنهاد شده اند. بنابراین الگوریتم های کنترلی بسته به نوع روش در نظر گرفته شده، ایده ها و تحلیلهای متفاوتی را پوشش می دهند.
اولین روش در کنترل برداری موتور القایی، کنترل با جهت یابی شارا (FOC) بوده است که توسط بلشکت (FOC مستقیم) و هس (FOC غیر مستقیم) در اوایل دهه ۷۰ میلادی ارایه شده اند. بعدها این روش ها توسط محققین زیادی مورد آنالیز و بحث قرار گرفته شدند. هم اکنون FOC به عنوان یک روش کنترلی استاندارد در صنعت است. در FOC معادلات موتور به سیستم مختصاتی که به طور سنکرون با بردار شار می چرخد منتقل می شوند. در روش FOC مجزا سازی گشتاور و شار تضمین می شود. به هر حال، معادلات موتورهای القایی غیر خطی بوده و مجزا سازی کامل فقط در شرایط شار ثابت صورت می پذیرد. به هر حال از نقطه نظر تئوری، برای مجزا کردن و خطی سازی معادلات IM، تبدیل مختصات متفاوتی می تواند انتخاب شود. که این تکنیک ها از روش های شناخته شده به نام کنترل غیر خطی سر چشمه گرفته اند. مارینو در یک تبدیل غیر خطی از متغیرهای حالت موتور را پیشنهاد داده است چنانچه در مختصات جدید، سرعت و اندازه شار روتور، با استفاده از پسخور مجزا شده اند و به نام کنترل خطی فیدبک (FLC) یا مجزا سازی ورودی – خروجی نامگذاری شده است. یک رویکرد ساده برآمده از مدل چند عددی موتور القایی توسط کازمیر کوزکی پیشنهاد شده است. در IM PBC برحسب معادلات لاگرانژ اویلر در مختصات تعمیم یافته، توصیف شده است. عملکرد FOC وابسته به تبدیل مختصات دقیق و تخمین زاویه شار است، که در این حالت محاسبات پیچیده و حساس به تغییرات پارامترهای موتور می باشد. به همین دلیل، در سال های اخیر تحقیقات فراوانی برای پیدا کردن راه حلی برای کنترل ماشین با دست یابی به پاسخ گشتاور سریع و دقیق همانند روش های برداری انجام شده است، که علاوه بر پاسخ دینامیکی سریع، منجر به کاهش پیچیدگی سیستم کنترلی، بر خلاف روش های کنترل برداری شود. در نیمه دهه ۸۰ میلادی استراتژی های جدیدی برای کنترل مستقیم گشتاور و شار استاتور به وسیله تاکاهاشی و نوگوچی به عنوان کنترل مستقیم گشتاور (DTC) و توسط دپنبرک به عنوان کنترل خودی مستقیم(DSC) ارایه شده اند. این روش ها برای جایگزینی روش های کنترل IM از جمله کنترل برداری کلاسیکFOC مطرح شده اند. روش پایه ارایه شده به نام DTC کلاسیک شناخته می شود.
کنترل شار و گشتاور در درایوهای مبتنی بر DTC کلاسیک، به صورت کنترل حلقه بسته و بدون استفاده از کنترل کننده جریان و مدولاسیون پهنای پالس(PWM) در مقایسه با روش های کنترل برداری متداول، می باشند. اصولاً، در DTC فقط نیاز به دانستن مقاومت استاتور می باشد که این موضوع، حساسیت درایو به تغییرات پارامترهای ماشین را کاهش میدهد. به علاوه DTC در مقایسه با FOC متداول، نیاز به تبدیل مختصات بین دستگاه ساکن وسنکرون، ندارد که باعث کاهش پیچیدگی در سیستم کنترلی می شود.
اصول کلیDTC کلاسیک کنترل شار و گشتاور الكترومغناطیسی مجزا شده با استفاده از کنترل هیسترزیس خطاهای شار و گشتاور و موقعیت شار استاتور و استفاده از یک جدول کلید زنی (ST) از پیش تعریف شده، می باشد. درایوهای صنعتی با اصول DTC امروزه در بازار موجود می باشند. استفاده از کنترل کننده هیسترزیس در DTC، منجر به فرکانس کلید زنی متغیر، که وابسته به سرعت روتور، بار و فرکانس نمونه گیری است، می شود. فرکانس کلید زنی متغیر، ممکن دینامیک رزونانس را در بار، تحریک کند و از این رو یک مشکل اساسی را در DTC شکل می دهد.
همچنین برای پیاده سازی دیجیتال، فركانس نمونه گیری سیستم برای محاسبه شار و گشتاور باید به منظور برآورده شدن ردیابی خوب و محدود کردن خطای شار و گشتاور درون باند معین شده ، زیاد باشد. مشکلات عمده در حالت ماندگار موتور، علاوه بر فرکانس کلید زنی متغیر، ریپل گشتاور، شار و جریان موتور در سطح بالا است. به طور خلاصه می توان معایبDTC کلاسیک را به صورت زیر دسته بندی کرد:
- ریپل زیاد گشتاور، شار و جریان
- فرکانس کلید زنی متغیر
- سطح نویز بالا در سرعت های پایین
- عدم کنترل مستقیم جریان
- کنترل دشوار گشتاور و شار در سرعت های پایین.

موتورهای القایی و به خصوص موتورهای قفس سنجابی مزایایی نسبت به موتورهایdc دارند. از جمله این مزایا می توان نیاز به نگهداری کمتر، قابلیت اطمینان بالاتر، هزینه، وزن، حجم و اینرسی کمتر، راندمان بیشتر، قابلیت عملکرد در محیط های با گرد و غبار و در محیطهای قابل انفجار را نام برد.
مشکل اصلی موتورهایdc وجود کموتاتور و جاروبک است که نگهداری زیاد و پرهزینه و نامناسب بودن عملکرد موتور در محیط های با گرد و غبار بالا و قابل انفجار را به دنبال دارد. با توجه به مزایای فوق در تمامی کاربردها، موتورهای القایی بطور وسیع بر سایر موتورهای الکتریکی ترجیح داده می شوند. با اینحال تا چندی پیش، از موتورهای القایی تنها در کاربردهای سرعت ثابت استفاده می شد و در کاربردهای سرعت متغیر موتورهایdc استفاده ی بیشتری داشته اند. این امر ناشی از آن است که روش های مرسوم در کنترل سرعت موتورهای القایی هم غیراقتصادی و هم دارای راندمان کم بوده است.
با بهبود در قابلیت ها و کاهش در هزینه تریستورها و اخیرا در ترانزیستورهای قدرت و GTOها، امکان ساخت محرکه های سرعت متغیر با استفاده از موتورهای القایی بوجود آمده است که در برخی موارد حتی از نظر هزینه و عملکرد از محرکه های با موتور dc نیز پیشی گرفته اند. درنتیجه این پیشرفت های محرکه های موتورهای القایی در برخی کاربردهای سرعت متغیر به جای محرکه هایdc مورد استفاده قرار گرفته اند. پیش بینی می شود در آینده موتورهای القایی بطور گسترده در محرکه های سرعت متغیر مورد استفاده قرار خواهند گرفت.
تاکنون الگوریتم های کنترلی متعددی برای رسیدن به اهدافی چون دقت پاسخ در حالت دائم، دینامیک بالا، سادگی سیستم کنترلی، بازده، هزینه کم، کاهش نویز گشتاور و صدا ارائه شده است. کنترل ولتاژ – فرکانس v/f) حلقه باز یا کنترل اسکالر، فاقد کنترل حلقه بسته بر روی سرعت یا موقعیت است. بنابراین علیرغم کار در رنج وسیع تغییرات سرعت، دارای دینامیک پایین و کنترل سرعت کند می باشد. داشتن دینامیک گشتاور سریع و کنترل دقیق سرعت نیازمند کنترل حلقه بسته سرعت و حتی گشتاور است. به این منظور خطی سازی مشخصه ی گشتاور – سرعت و یا مشخصهى گشتاور – جریان، مشابه موتورهایdc مغناطیس دائم مناسب به نظر می رسد. سه روش عمده برای خطی سازی مشخصه های موتورهایdc مغناطیس دائم مناسب به نظر می رسد. سه روش عمده برای خطی سازی مشخصه های مذکور از طریق معادلات حاکم بر موتور القایی وجود دارد که عبارتند از:
-کنترل برداری ولتاژ و جریان (Vector current and voltage control)
-کنترل مستقیم گشتاور (Direct torque control)
-کنترل خطی سازی فیدبک.
در کنترل حلقه بسته حرکت(سرعت یا موقعیت)، استفاده از حسگرها می تواند در محدوده وسیعی از سرعت به کار رود، هرچند که در سرعت های بسیار پایین حسگرها کارا نبوده و سرعت یا موقعیت مورد نیاز با اندازه گیری سایر پارامترها از جمله ولتاژ و جریان، تخمین زده می شود.
در روش کنترل برداری، کمیت های استاتور(شار، جریان، ولتاژ و غیره) به مؤلفه هایی تجزیه می شوند که به صورت سنکرون(همزمان) با شار روتور می چرخند. کمیت های محور مستقیم، مؤلفه هایی را نشان می دهند که با محور سیم پیچ میدان همراستا هستند، و کمیت های محور متعامد مؤلفه هایی هستند که بر محور سیم پیچ میدان عمودند. در حالت ماندگار امواج شار و mmf ناشی از سیم پیچ های روتور و استاتور یک موتور القایی با سرعت سنکرون و بصورت همزمان با هم می چرخند. در یک ماشین القایی، برخلاف ماشین سنکرون، جریان های روتور مستقیما اعمال نمی شوند، بلکه این جریان ها به دلیل لغزش روتور نسبت به موج شار چرخان ناشی از جریان های استاتور، در روتور القاء می شوند. در روش کنترل مستقیم گشتاور، گشتاور تولیدی ماشین، بدون نیاز به کنترل جریان ها و بصورت مستقیم کنترل می شوند و اصلی ترین مزیت آن نسبت به روش کنترل برداری، دینامیک بسیار سریع آن می باشد.
امروزه موتورهای القایی بصورت سه فاز یا تک فاز (در توان های پایین) بیشترین کاربرد را در صنعت دارا هستند. موتورهای صنعتی معمولی برای کار در سرعت ثابت از شبکه های قدرت با ولتاژ و فرکانس ثابت تغذیه می شوند. در حالیکه موتورهای موجود در محرکه های با سرعت متغیر با استفاده از مبدل های الکترونیک قدرت یاPECs، توسط ولتاژی با اندازه و فرکانس متغیر تغذیه می شوند. پیشرفت در صنعت میکروپرسسورها و ادوات الکترونیک قدرت و در نتیجه عملی شدن روش های کنترلی پیچیده با قیمت مناسب برای استفاده در کنترل موتورهای القایی، کاربرد این نوع موتور در موارد سرعت متغیر را بسیار راحت تر کرده است.
معرفی موتور القایی:
ماشین القایی ماشینی است که در آن به استاتور مستقیما جریان متناوب اعمال می شود و جریان متناوب روتور از عمل القای ترانسفورماتوری بین استاتور و روتور ناشی می شود. وقتی که سیم پیچ استاتور توسط یک منبع چندفاز متعادل تحریک می شود، یک میدان مغناطیسی در فاصله هوایی به وجود می آید که با سرعت سنکرون تعیین شده توسط تعداد قطب های استاتور و فرکانس اعمال شده به استاتور می چرخد.
روتور ماشین چندفاز القایی می تواند به دو صورت باشد. روتور سیم پیچی شده مشابه با سیم پیچی استاتور و با همان تعداد قطب ساخته می شود. پایانه های سیم پیچ روتور به حلقه های لغزان سوار شده بر روی محور متصل می شود. ماشین های القایی با روتور سیم پیچی شده نسبتأ نادرند و تنها بصورت معدود برای کاربردهای خاص ساخته می شوند. نوع دیگر موتورهای القایی با روتور قفس سنجابی است که در آن سیم پیچ از میله های هادی نصب شده در شیارهای آهن روتور و اتصال کوتاه شده در دو طرف، توسط حلقه های هادی انتهایی، تشکیل شده است. سادگی و استحکام فوق العاده ی ساختار قفس سنجابی مزیت اندازه های مختلف تبدیل کرده است.
برای آنکه محرکه ی مناسبی برای یک بار با کاربرد خاص انتخاب شود، ابتدا بایستی اطلاعات کاملی از نیازهای بار در دست باشد. پس از آن موتوری با مشخصه های سرعت-گشتاور و سرعت جریان متناسب با نیازهای بار انتخاب می شود. مشخصه ی موتور با بار هنگامی متناسب است که بدون تجاوز از مقادیر حدی جریان، نظير جریان نامی موتور و ظرفیت جریانی منبع، نیازهای گشتاور و سرعت بار تامین شود.
مشخصه بدست آمده از حالتی که منبع در شرایط نامی کار می کند، مشخصه ی طبیعی نامیده می شود. برای مثال مشخصه ی سرعت -گشتاور یک موتور القایی در ولتاژ نامی و فرکانس نامی، مشخصه ی طبیعی آن است. معمولا مشخصه ی طبیعی سرعت-گشتاور یک موتور با تمام نیازهای بار منطبق نیست. بنابراین یک مبدل نیمه هادی قدرت بین منبع و موتور قرار می گیرد تا مشخصه های موردنیاز بار تامین شود.
مبدل نیمه هادی قدرت که از این پس برای سادگی آن را مبدل می نامیم، انتقال قدرت از منبع به موتور را به نحوی تنظیم می کند که مشخصه های سرعت جریان و سرعت گشتاور با نیازهای بار سازگار باشد. فرمان های کنترلی مبدل در یک واحد کنترل ساخته می شود که در سطوح ولتاژ و قدرت خیلی پایین کار می کند. این واحد شامل مدارهای مجتمع خطی و دیجیتال و ترانزیستورها می باشد. سیگنال فرمان که نقطه کار محرکه را تنظیم می کند، یکی از ورودی های واحد کنترل را تشکیل می دهد. به دو دلیل واحد کنترلی از مدار قدرت جداسازی الکتریکی می شود.
- در صورت عدم جداسازی الکتریکی، و در شرایط عملکرد ناصحيح مبدل، ممکن است منجر به اتصال ولتاژ مدار قدرت به واحد کنترل شود. این امر می تواند باعث آسیب به واحد کنترل شود.
۲. مبدل ها مقدار زیادی هارمونیک تولید می کنند. در صورت عدم جداسازی الکتریکی، هارمونیک ها می توانند وارد واحد کنترلی شوند و در کار آن اختلال ایجاد کنند. تشخیص و شناسایی پارامترهای خاصی همچون جریان مبدل، سرعت موتور و غیره معمولا برای حفاظت و یا برای کار مدار بصورت حلقه بسته موردنیاز است.
باتوجه به دلایل فوق، برای دریافت و تشخیص پارامترهای الکتریکی مدار قدرت، همچون جریان و ولتاژ مبدل و غیره، جداسازی الکتریکی مدار قدرت و کنترل الزامی است.
انواع مبدل ها:
موتورهایی که عموماً در محرکه های سرعت متغیر به کار می روند موتورهای القایی،dc و سنکرون هستند. برای کنترل موتورهای القایی،یک منبع ac با فرکانس ثابت و ولتاژ متغیریایک منبع ac با ولتاژ یا جریان متغیر و فرکانس متغیر لازم است. موتورهای سنکرون به یک منبع فرکانس متغیر با ولتاژ یا جریان متغیر نیاز دارند. برای کنترل موتورهایdc، یک منبع ولتاژ dc متغیر لازم است. البته منبع ولتاژ dc متغیر برای کنترل موتورهای القایی و سنکرون نیز به کار می رود.
منبعی که عموماً موجود است، منبع ac با ولتاژ و فرکانس ثابت است. گاهی اوقات ممکن است یک منبع ولتاژ deی ثابت در دسترس باشد. برای برآورد نیاز های موتورهای مختلف لازم است از مبدل های نیمه هادی قدرت استفاده شود. در یک محرکه سرعت متغیر ممکن است از یک مبدل تنها و یا چند مبدل استفاده شود. معمولاً هرچه عملکرد مبدل نواحی کمتری را پوشش دهد، هزینه آن کمتر و آرایش آن ساده تر می باشد.
کنترل موتور القایی:
وجود سوئیچ های قدرت با بازده بالا و پردازنده های سریع، زمینهی پیشرفت و استفاده از محرکه های موتور القایی را بخوبی فراهم آورده است. در یک محرکه موتور القایی نمونه، مبدل قدرت، انرژی منبع تغذیه را به شکل مناسب و قابل استفاده توسط موتور تبدیل می کنند. می توان مشخصه ی خروجی مبدل قدرت را طوری تنظیم نمود تا مبدل به شکل یک منبع جریانیا منبع ولتاژ با دامنه و فرکانس قابل تنظيم عمل نماید.
شكل زیر بلوک دیاگرام پایه برای کنترل یک موتور القایی را نشان می دهد.
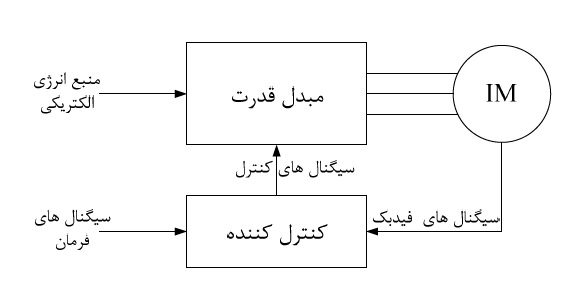
شکل بلوک دیاگرام یک محرکه موتور القایی.
مبدل قدرت، توان تحویلی به موتور را مطابق فرمان اعمال شده توسط کنترل کننده، تولید می نماید. عمل مبدل درواقع شامل تولید شکل موج های ولتاژ و جریان در زمان مناسب می باشد. کار اولیه کنترل کننده، تبدیل مقادیر زمان و سیگنال های فیدبک به سیگنال های کنترل مبدل می باشد. کنترل کننده ممکن است عملیات اضافی دیگری نظیر مانیتور کردن شرایط و حفاظت را نیز انجام بدهد.
استراتژی کاری:
در شکل زیر استراتژی های کاری معمول موتوری در محدوده ای وسیع از بازه ی کنترل سرعت نشان داده شده است. برای حالت موتوری می توانیم سه حالت زیر را در نظر بگیریم
حالت۱: ثابت نگه داشتن سرعت لغزش و تنظیم جریان استاتور برای به دست آوردن گشتاور ثابت.
حالت۲: ثابت نگه داشتن ولتاژ استاتور در مقدار نامی خود و تنظیم جریان استاتور برای حصول توان ثابت.
حالت 3: ثابت نگه داشتن ولتاژ استاتور در مقدار نامی خود و تنظیم سرعت لغزش، به نحوی که همواره لغزش ایجاد شده از لغزش متناظر با گشتاور حداکثر، کمتر باشد.
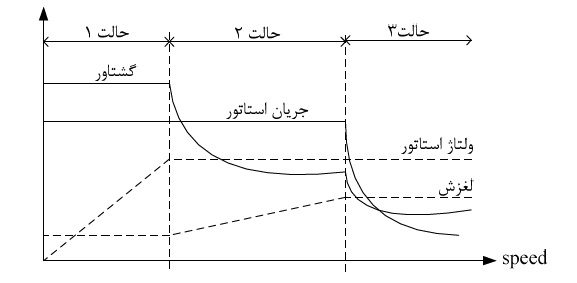
شکل حالت های کاری روی بازه ی وسیعی از سرعت.
کنترل برداری:
یکی از روش هایی که در کنترل محرکه موتورهای الکتریکی به کار می رود، کنترل برداری است که دارای انواع مختلفی می باشد.
اصول کلی و روابط مربوط به کنترل برداری:
دریک ماشینDC محورهای سیم پیچهای آرمیچر و میدان بر یکدیگر عمود می باشند، بنابراین mmf ایجاد شده توسط جریان های آرمیچر و میدان نیز برهم عمود هستند. با صرفنظر از اشباع هسته آهن، میدان های عمود برهم، هیچ اثر متقابلی بر یکدیگر نداشته و می توان گشتاور ایجاد شده را بصورت زیر بیان نمود:
در حالت کلی، کنترل گشتاور یک ماشین القایی سه فاز به سادگی و سهولت کنترل گشتاور ماشین DC نمی باشد، زیرا میدان های روتور و استاتور تابع شرایط کاری بوده و اختلاف فاز جهت های فضایی آنها با یکدیگر۹۰ درجه نیست، بنابراین بر هم اثر متقابل دارند. سیم پیچ میدان روتور در یک ماشین القایی ممکن است شبیه سیم پیچ میدان تحریک در یک ماشینDC باشد ولی القای ایجاد شده به طور مستقل قابل کنترل نمی باشد. با تحریک سینوسی، میدان روتور در سرعت سنکرون می چرخد. کنترل برداری موتورهای القایی به روش های مختلفی انجام می شود. با وجود این در تمامی ساختارهای آن، گشتاور و شار پیوندی ماشین توسط کنترل برداری جریان های استاتور کنترل می شوند. بردار جریان استاتور به دو مؤلفه گشتاورساز و شارساز در قاب مرجع چرخان تقسیم می شود به طوریکه یک مؤلفه در راستای بردار شار پیوندی ماشین و مؤلفه ی دیگر عمود بر آن می باشد.
انواع کنترل برداری:
روش کنترل برداری به دو دسته روش مستقیم و غیر مستقیم تقسیم بندی می شود. در نوع مستقیم، موقعیت زاویه ای میدان روتور مستقیما همانند شار فاصله هوایی اندازه گیری و یا از روی جریان های اندازه گیری شده محاسبه می شود. در نوع غیرمستقیم، زاویه مذکور با اندازه گیری کمیت های جانشین نظیر سرعت لغزش به دست می آید.
کنترل برداری مستقیم جریان یا ولتاژ:
کنترل برداری مستقیم می تواند به صورت ولتاژ یا جریان باشد. در نوع مستقیم جریان بر خلاف نوع ولتاژ، برای کنترل گشتاور، از اینورترPWM تنظیم شده با جریان استفاده می شود. برای جهت دادن میدان استفاده از کنترل جریان استاتور، آسان تر از کنترل ولتاژ استاتور انجام میشود. چرا که در روش کنترل ولتاژ استاتور، افت ولتاژ اندوکتانس های گذرای استاتور نیز بایستی در نظر گرفته شوند. کنترل مستقیم جریان استاتور با وجود مقدار ولتاژ کافی برای شینDC و کلیدزنی سریع ادوات نیمه هادی، به آسانی انجام می شود.
روش مستقیم کنترل برداری، بر پایه اندازه گیری شار فاصله هوایی با استفاده از سیم پیچ های جستجوی جاسازی شده و یا حسگرهای اثر هال، استوار است. در فرکانس های پایین، انحراف انتگرال گیری مربوط به سیم پیچ های جستجو مشکلاتی را ایجاد می کنند.
حسگرهای اثر هال نیز شکننده و حساس به درجه حرارت می باشند. در این روش، شار اندازه گیری شده در فاصله ی هوایی، شار منتجه و یا شار متقابل می باشد. بنابراین شاری که از سیم پیچ های روتور عبور کرده و زاویهی فضایی مربوطه را می سازد، شار اندازه گیری شده نمی باشد. ولی می توان موقعیت زاویه ای و دامنه ی شار روتور را با جریان های اندازه گیری شده استاتور تعیین کرد. در کنترل برداری مستقیم نوع ولتاژ، جهت دادن جریان های استاتور با اعمال ولتاژهای مناسب به استاتور قابل دسترسی است.
کنترل برداری غیرمستقیم:
در عملکردهای سرعت پایین و همچنین در کنترل موقعیت، استفاده از حسگرهای شار به دلیل خطاهای انتگرال گیری مورد استفاده در این حسگرها نتایج مطلوبی ندارد.
کنترل مستقیم گشتاور:
شکل توسعه یافته و پیشرفته نوعی کنترل به نام کنترل مستقیم خودی است که در موتورهای القایی تغذیه شده با مبدل های قدرت PWM با منبع ولتاژ استفاده می شد و بعدها تحت عنوان روش کنترل برداری گشتاور در محرکه های موتور a.c. با مبدل های قدرت با منبع ولتاژ و جریان به کار گرفته شد. در یک محرکه DTC، فلو و گشتاور الکترومغناطیسی مستقیم و به صورت مستقل به وسیله انتخاب کلیدزنی بهینه مبدل قدرت کنترل می شوند بطوریکه نیازی به کنترل جریان نیست. انتخاب کلیدزنی طوری است که خطای فلو و گشتاور را در داخل باند هیسترزیس محدود می کند. با این کار پاسخ سریع گشتاور، فرکانس پایین کلیدزنی مبدل قدرت و تلفات پایین کلیدها قابل حصول است. بردارهای فضایی ولتاژ مورد نیاز با استفاده از یک جدول به نام جدول کلیدزنی انتخاب می شوند. در حقیقت بر مبنای اندازه و موقعیت زاویه ای شار استاتور در یکی از ۶ (یا۱۲) ناحیه هر دوره تناوب و نیز مقدار نسبی و علامت خطای اندازه ی شار و گشتاور، بردار ولتاژ مناسب و یا ترکیبی از بردارهای ولتاژ با زمان بندی مشخصی به مبدل قدرت اعمال می شود. به منظور مشخص سازی خطاهای شار استاتور و گشتاور لازم است که مقادیر متغیرهای مربوطه تخمین زده شود. از این نظر روش کنترلیDTC تا حدودی شبیه روش کنترل برداری مستقیم است و تخمین متغیرها به روش مشابهی انجام می شود. در محرکه های کنترل شده به روش DTC بر خلاف روش های معمول برداری، نیازی به انتقال قاب مرجع از ساکن به سنکرون نیست.
در کنترل مستقیم گشتاور، حالت های کلیدزنی مبدل قدرت با استفاده از جدول کلیدزنی و بدون استفاده از کنترل کننده جریان و بلوک مدولاسیون پهنای پالس (PWM) انتخاب می شوند. بنابراین پاسخ گشتاور سریعتری را شاهد خواهیم بود. البته استفاده از جدول کلیدزنی دارای معایبی نیز هست که در ادامه به آن اشاره می شود.
در کاربردهای دیجیتالی، فرکانس نمونه برداری سیستم برای محاسبه گشتاور و شار بایستی بسیار سریع باشد تا سیستم عملکرد بهتری داشته باشد و خطاهای شار و گشتاور از محدوده های مشخص شده تجاوز نکنند. فرکانس کلیدزنی مبدل قدرت یا اینورتر که به سرعت درایو محدوده خطای مربوطه بستگی دارد، در مقایسه با فرکانس نمونه برداری بسیار پایین است اگر چه می توان فرکانس کلیدزنی اینورتر را با ترکیب کردن سیگنالهای فرکانس بالا با سیگنال های خطای گشتاور و شار افزایش داد، ولی فرکانس کلیدزنی اینورتر در محدوده های خطای کوچک مقدار ثابتی نخواهد داشت و بنابراین مسأله طراحی فیلترهای خروجی اینورتر مشکل تر می شود. مشکل دیگر روش کنترلیDTC وجود نوسان بالا در پاسخ گشتاور و جریان موتور است.
بلوک دیاگرام محرکه موتور القایی شامل DTC
در شکل زیر بلوک دیاگرام محرکه موتور القایی که با استفاده از کنترل کننده DTC کنترل می شود، نشان داده شده است. محل قرارگیری بلوک DTC و ارتباط آن با قسمت های مختلف سیستم نیز در شکل مشخص شده است.
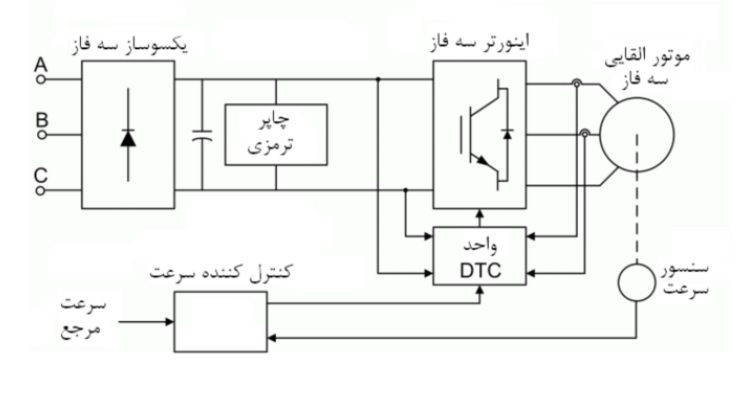
شکل بلوک دیاگرام محرکه موتور القایی شامل DTC
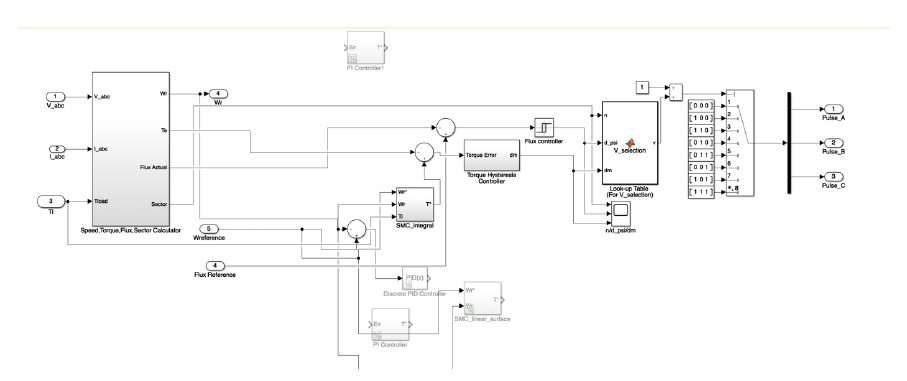
بلوک دیاگرامDTC:
شکل زیر بلوک دیاگرام کنترل مستقیم گشتاور یاDTC را نشان می دهد.
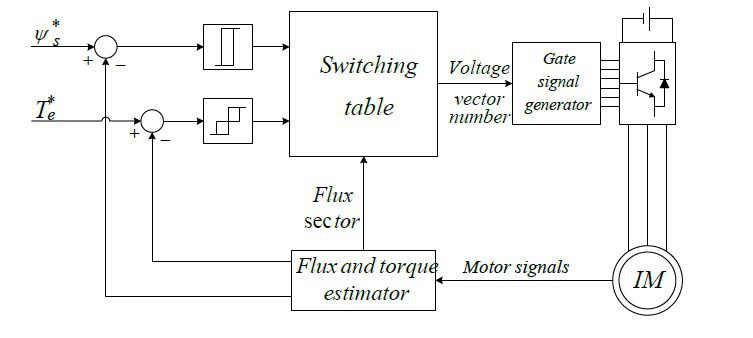
همچنانکه از شکل مشخص است، روش DTC از بسیاری جهات شباهت زیادی به روش کنترل برداری مستقیم دارد. درواقع میتوان گفت که DTC نوعی کنترل برداری جریان d.c. است. هر دو روش نیاز به رویت گری شار و گشتاور دارند و چنانچه کنترل بدون حسگرهای حرکتی باشد، استفاده از رویت گر سرعت نیز ضروری خواهد بود. هر چند روش DTC دارای مقیاس واقعی بوده و نیازی به طراحی کنترل کننده هایPI جریان d.c.ی،
ida , iqa نیست. همچنین بلوک تبدیل قاب مرجع و PWM حلقه باز حذف شده و به جای آنها یک جدول کلیدزنی قرار داده می شود. بنابراین با توجه به این ساده سازی ها در ساختمان کنترل کننده، DTC تنها در قسمت رویت گر سرعت – گشتاور – شار به پارامترهای موتور وابسته خواهد بود. به علاوه DTC بر خلاف کنترل برداری که با شار روتور کار می کرد، با شار استاتور کار می کند.
از نظر ویژگی های دینامیکی، با وجود اینکه دینامیک شار برای کنترل برداری مستقیم به دلیل صرفنظر کردن از دینامیک جریان مؤلفهى شار روتور محور ، کندتر است ولی دو روش تا حدودی شبیه هم عمل می کنند. در بلوک دیاگرام شکل بالا می توان به جای کنترل کننده های هیسترزیس گشتاور و شار، از منطق فازی با کنترل نوع مد لغزشی استفاده نمود. در ضمن باید توجه داشت، چون سطح فلوی استاتور DTC توسط باند هیسترزیس در یک مقدار ثابتی نگه داشته می شود؛ انتخاب سطح فلو در ماشین بسیار مهم است. نوسانات گشتاور مستقیما کنترل می شوند ولی تلفات هسته و صدای ایجاد شده در ماشین بستگی به انتخاب سطح فلوی استاتور دارند.
مقایسه کنترل برداری مستقیم با DTC
در چند سال اخیر محققین زیادی سعی در برطرف کردن مشکلات روش DTC که در بالا ذکر شد، داشتند. از جمله راهکارهای مهمی که توسط برخی محققین در این زمینه مطرح شده می توان به موارد زیر اشاره کرد:
1-استفاده از جدول های کلیدزنی بهینه،
2-استفاده از مقایسه کننده های دارای هیسترزیس یا بدون آن، بصورت ۲یا۳ سطحه؛
3-اعمال روش هایDTC در کاربردهای فرکانس کلیدزنی ثابت با استفاده از روش هایPWM یا SVM؛
۴-بکارگیری روش های منطق فازی یا سیستم های فازی – شبکه عصبی؛
5- استفاده از تخمین گرهای شار پیچیده برای بهبود کنترل در سرعت های پایین.
تمامی روش های ارایه شده ی مذکور، عملکرد DTC را بهبود می بخشند ولی از طرفی پیچیدگی شماتیک کنترلی را در پی خواهند داشت.
بدلیل اینکهDTC اساساً یک روش فاقد حسگر است؛ از جهات زیادی به کنترل برداری مستقیم شباهت دارد. در DTC بر مبنای خطای اندازه ی گشتاور و شار و نیز موقعیت بردار شار استاتور در یکی از نواحی شش گانه دوره تناوب، یک بردار ولتاژ مشخص و یا ترکیبی از بردارها به مدت زمان مشخص و مستقیماً به اینورتر اعمال می شود. سیستم کنترلی به منظور آشکارسازی خطای گشتاور و شار استاتور، نیازمند تخمین متغیرهای مربوطه است. بنابراین تمامی تخمین گرهای نوع شار یا گشتاور و نیز آشکار ساز سرعت که در کنترل برداری مستقیم به کار می رفت؛ در DTC نیز مناسب است
قسمت هایی از کنترل کننده برداری مستقیم که در DTC حذف شده است عبارتند از:
1-تنظیم کننده PI؛
2- بلوک انتقال قاب مرجع؛
3-تنظیم کنندهی جریان و
4-مولد سیگنالPWM.
به این ترتیب روش های کنترلی که چهار شرط فوق را داشته باشند، جزو کنترل کننده های مستقیم گشتاور هستند. به منظور مقایسه دو روش از دید حالت دائم، می توان ریپل گشتاور و جریان موجود را به ازای مقادیر مختلف سرعت و گشتاور ورودی بررسی نمود.
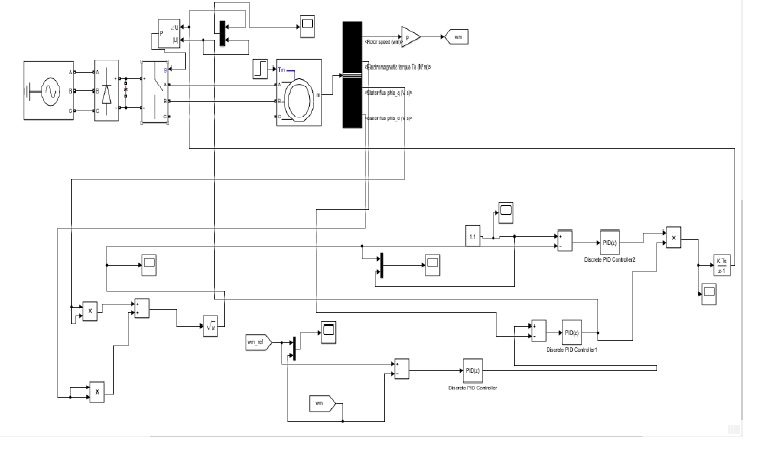
در این پروژه بهبود عملکرد کنترل گشتاور مستقیم(DTC) در کنترل موتور القایی سه فاز با روش های PID و کنترل مد لغزشی(SMC) و مدولاسیون پهنای پالس و بردار فضایی( SVPWM) بررسی شده است.
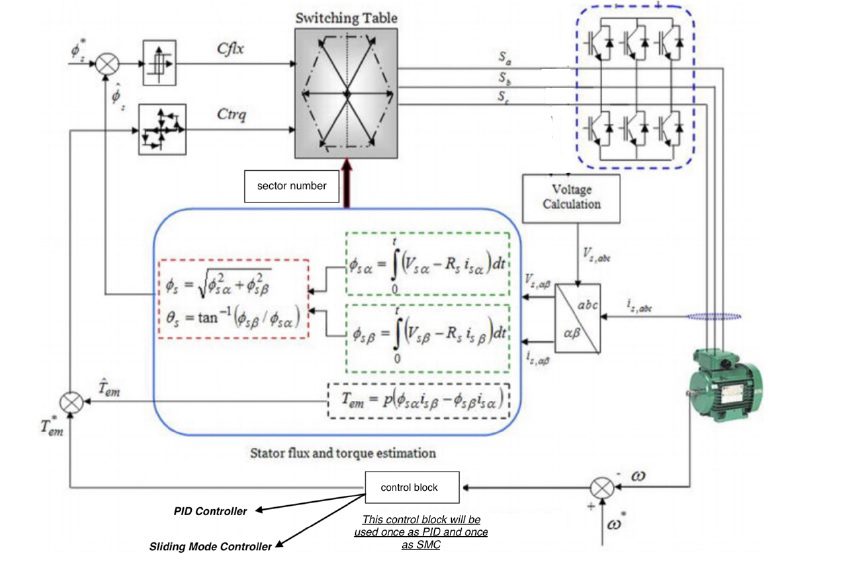
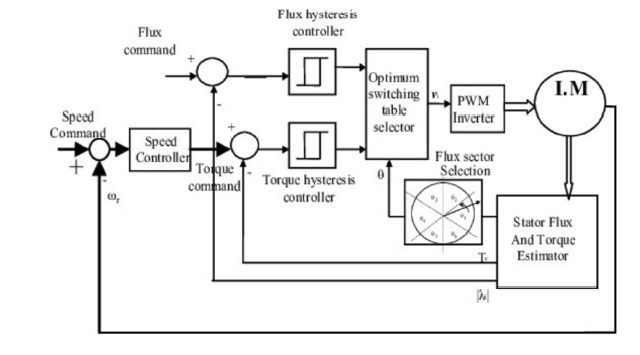
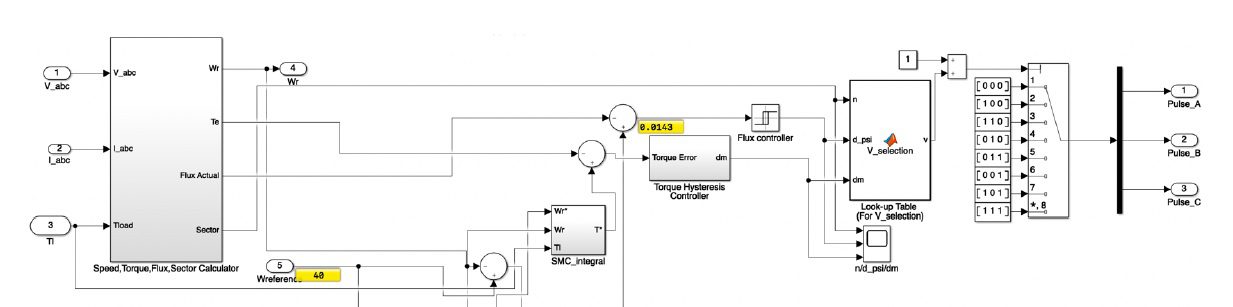
شکل بلوک دیاگرام DTC موتور القایی.
یک شار مطلوب و گشتاور مورد نیاز از کنترل کننده ها برای جبران انحراف آنها از شار و گشتاور فعلی از تخمینگر وجود دارد. بنابراین جدول کلیدزنی وجود دارد که جدول کلیدزنی بهینه برای ایجاد پالس معین برای 6 اینورتر جهت کنترل ولتاژ وجود دارد که برای موتور القایی ارسال می شود. همچنین روش کنترل برداری v/f همراه DTC استفاده شده است که تقریباً همه مولفه های DTC را دارد به جز اینکه خروجی کنترل متفاوتی دارد که نسبت ولتاژ به فرکانس را ثابت نگه می دارد.
مدل موتور القایی:
در این پروژه از موتور القایی سه فاز قفسه ای استفاده شده است.
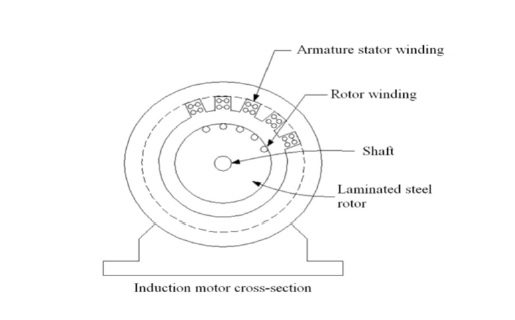
شکل مقطع موتور القایی
کنترل برداری SVPWM
روش مدولاسیون پهنای پالس بردار فضایی(SVPWM) یکی از بهترین روش های PWM برای محرکه فرکانس متغیر می باشد. روش SVPWM ولتاژ DC را به ولتاژهای سه فاز با فرکانس های کلیدزنی 6 کلید متناوب(اینورتر) انتقال می دهد که در شکل زیر نشان داده شده است.
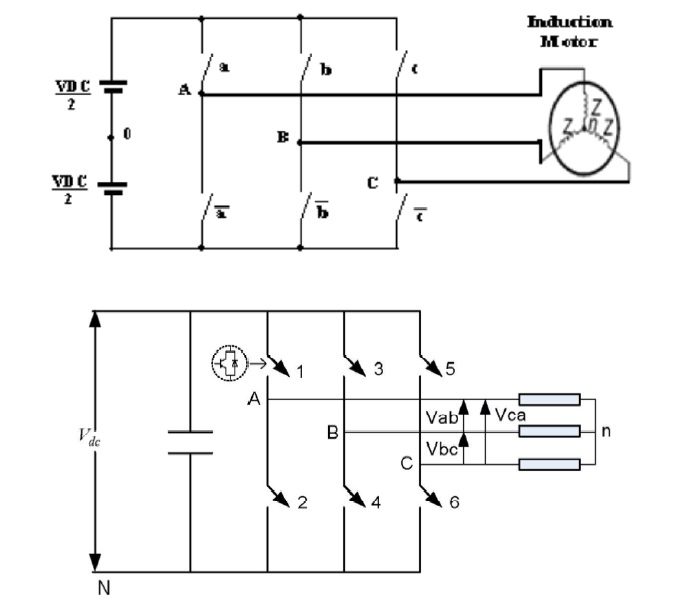
شکل اینورتر منبع ولتاژ سه فاز.
در این روش یک ولتاژ ورودی dc ثابت برای اینورتر ارائه می شود و یک ولتاژ خروجی ac کنترل شده با تنظیم دوره تناوب های روشن و خاموش اجزای اینورتر بدست می آید.
مدل سیمولینک سیگنال های کلیدها توسط روش SVPWM نشان داده شده است.
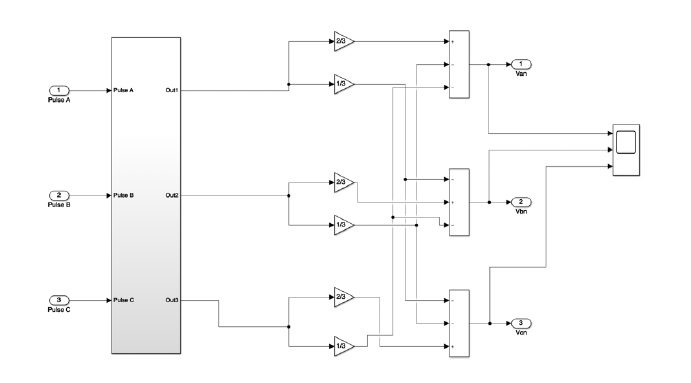
مدل سیمولینک ولتاژ تغذیه برای موتور القایی.
جدول کلیدزنی در شرایط کلیدزنی مختلف نشان داده شده است.
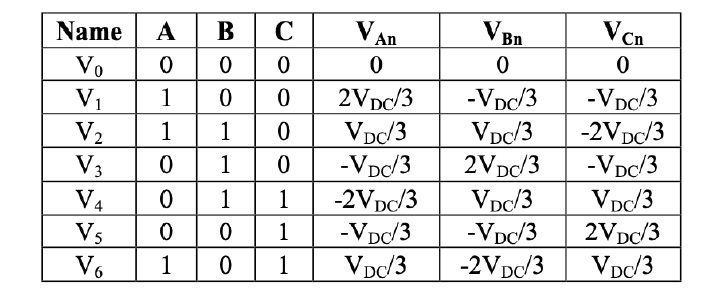
خروجی اینورترها
بردار فضایی ولتاژ فاز در شکل زیر نشان داده شده است.
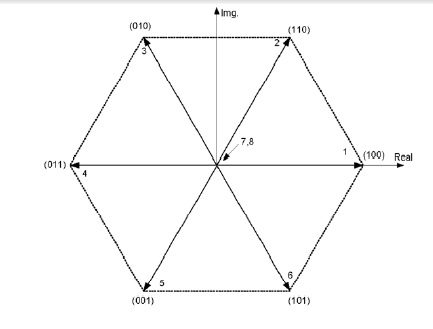
6 استاتور برای بردارهای پایه برای ولتاژ خروجی از اینورتر به موتور وجود دارند.
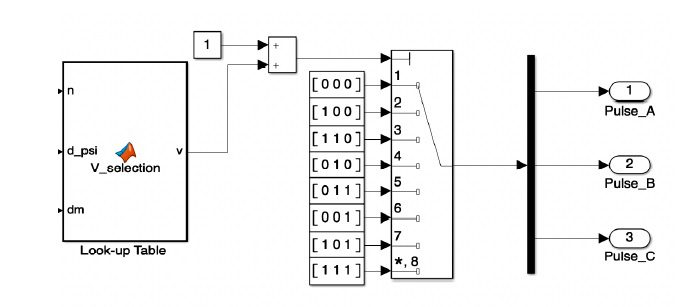
جدول لوک آپ(lookup) برای انتخاب بردارها.
شبیه سازی تکنیک های کنترلی مختلف برای کنترل گشتاور مستقیم(DTC):
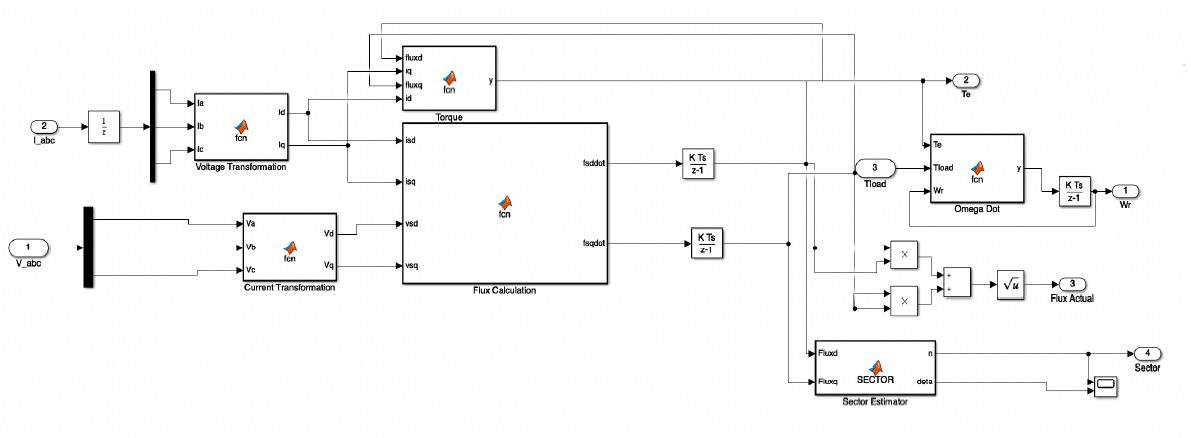
مدل سیمولینک تخمینگر گشتاور و حالت
کنترل گشتاور مستقیم(DTC) توسط کنترل کننده PI:
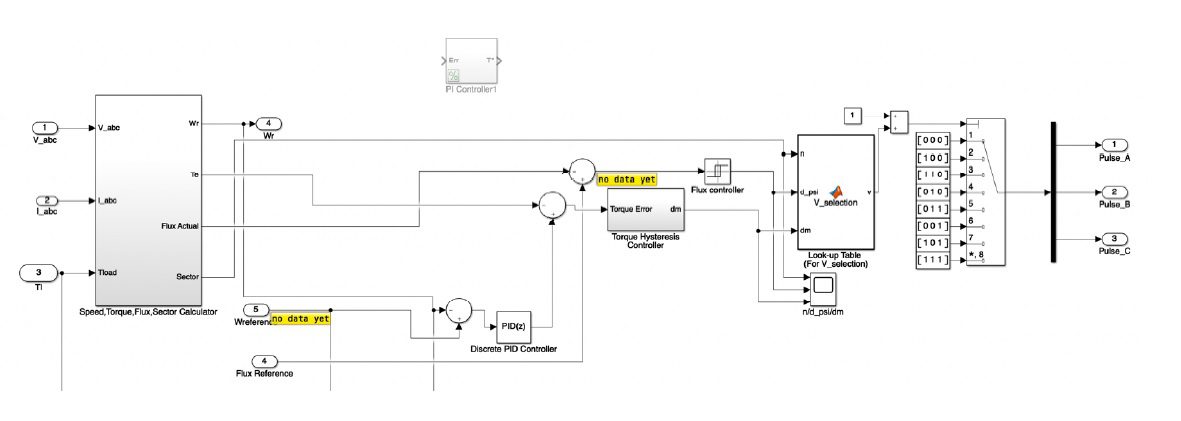
شکل بلوک دیاگرام موتور القایی
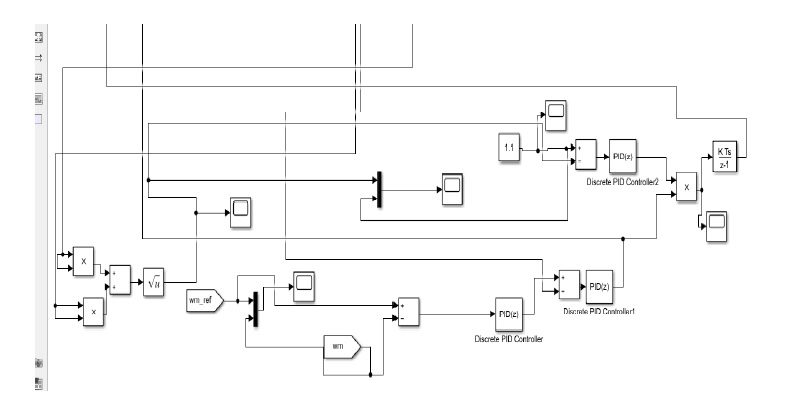
کنترل PID گشتاور مستقیم(DTC)
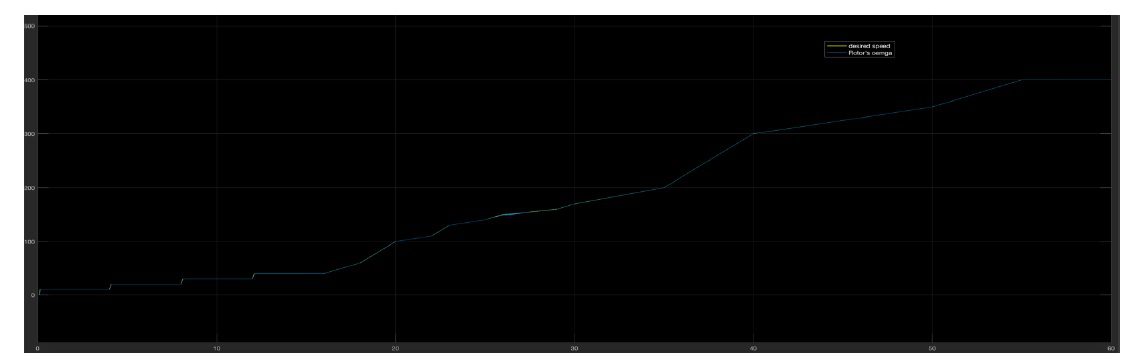
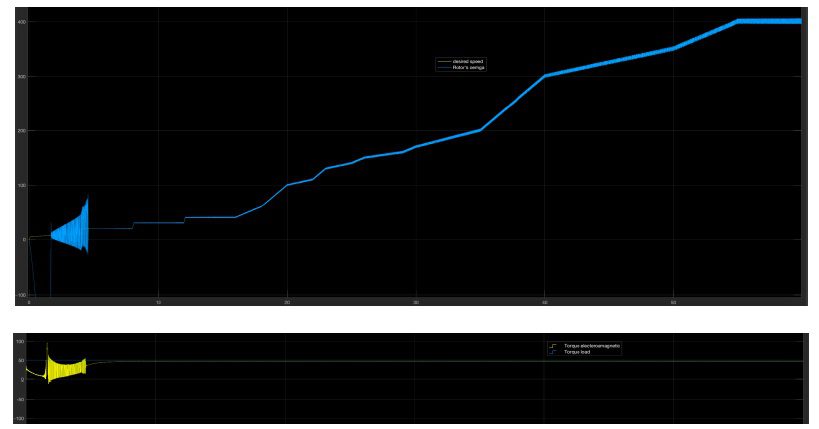
شکل خطای بین سرعت مطلوب و سرعت روتور در مورد بار گشتاور صفر
شکل خطای بین سرعت مطلوب و سرعت روتور در مورد بار گشتاور 25 نیوتن متر
شکل خطای بین سرعت مطلوب و سرعت روتور در مورد بار گشتاور 30 نیوتن متر
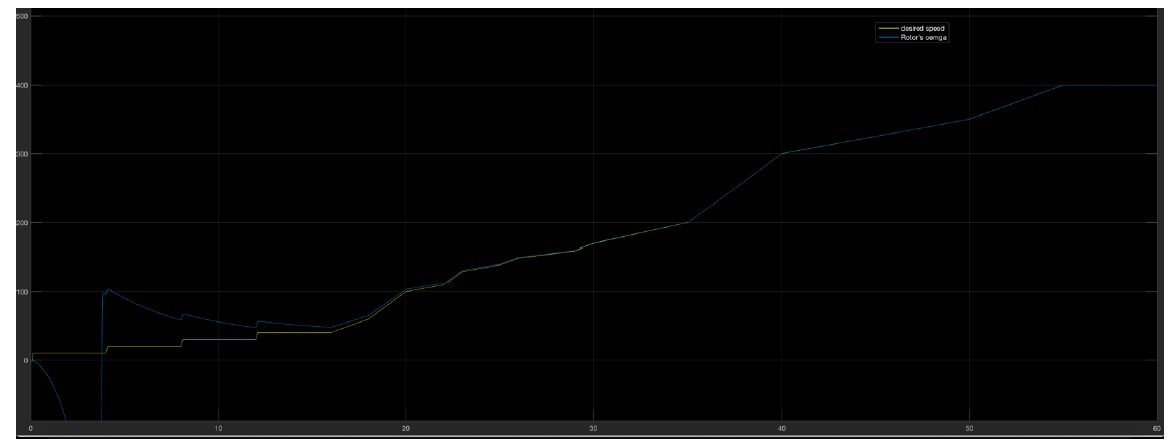
شکل خطای بین سرعت مطلوب و سرعت روتور در مورد بار گشتاور 50 نیوتن متر
شکل خطای بین بار گشتاور و گشتاور الکترومغناطیسی ایجادشده توسط موتور.

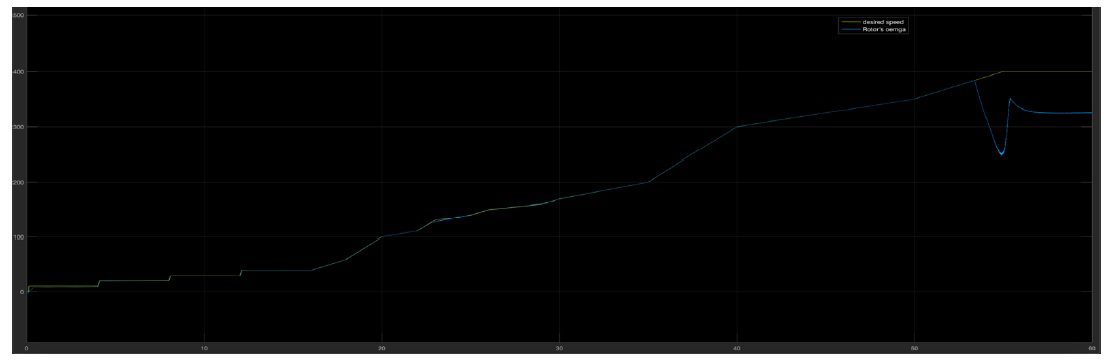
بهبود عملکرد DTC با بکارگیری کنترل مد لغزشی(SMC):
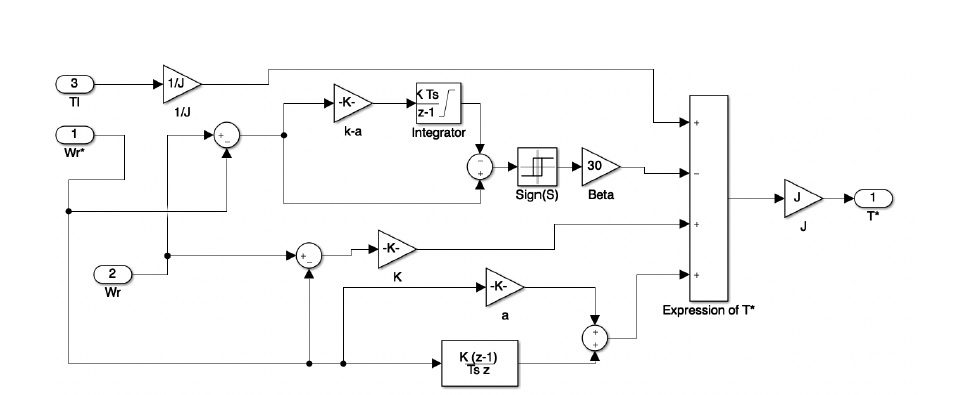
شکل کنترل SMC
شکل بلوک کنترل SMC
خطای بین سرعت مطلوب و سرعت روتور در مورد بار گشتاور صفر
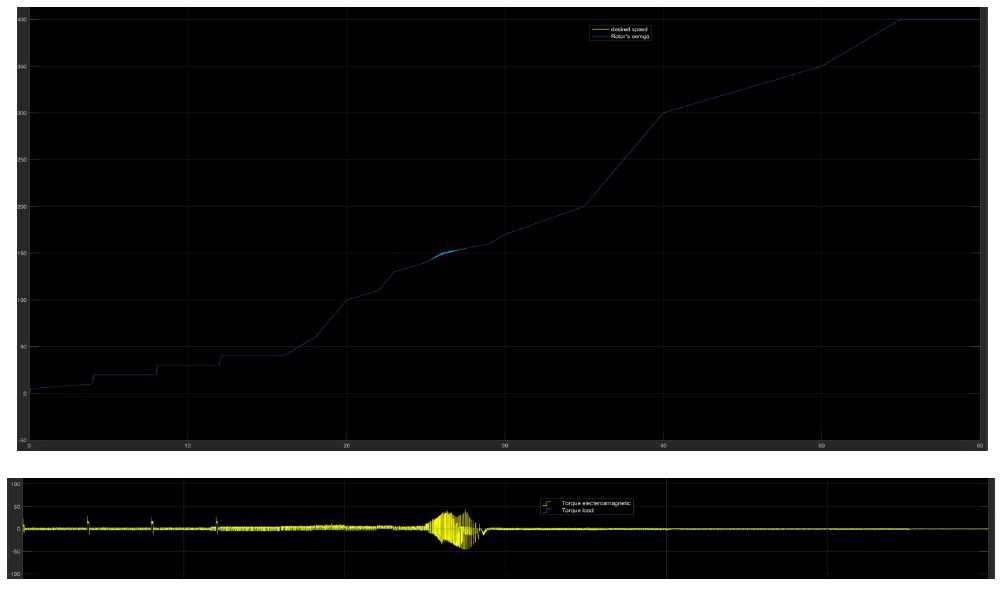
خطای بین سرعت مطلوب و سرعت روتور در مورد بار گشتاور 25 نیوتن متر
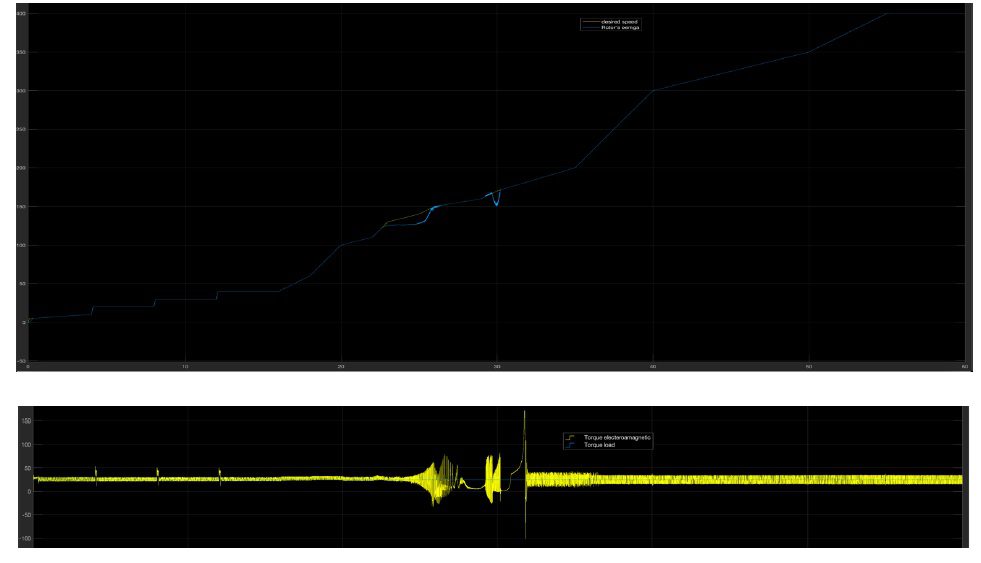
خطای بین سرعت مطلوب و سرعت روتور در مورد بار گشتاور 30 نیوتن متر
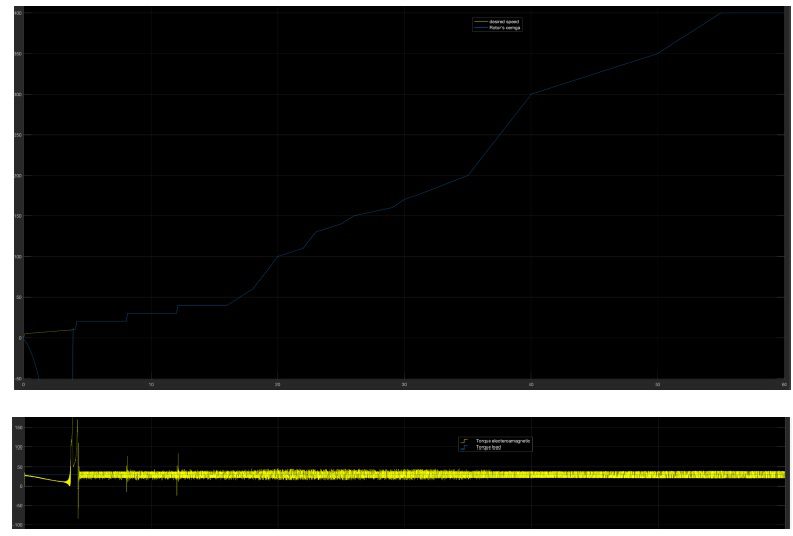
خطای بین سرعت مطلوب و سرعت روتور در مورد بار گشتاور 50 نیوتن متر
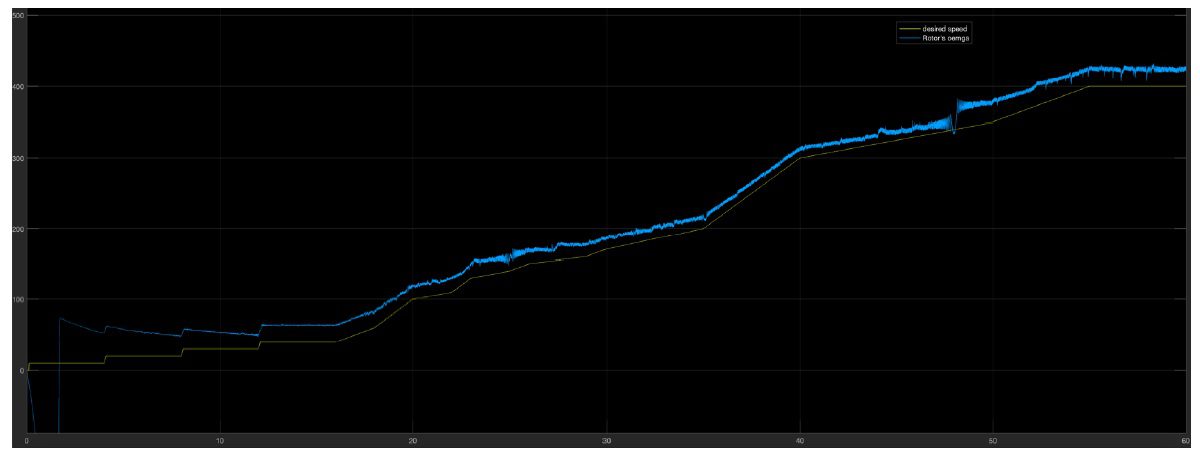
کنترلDTC با روش V/f ثابت:
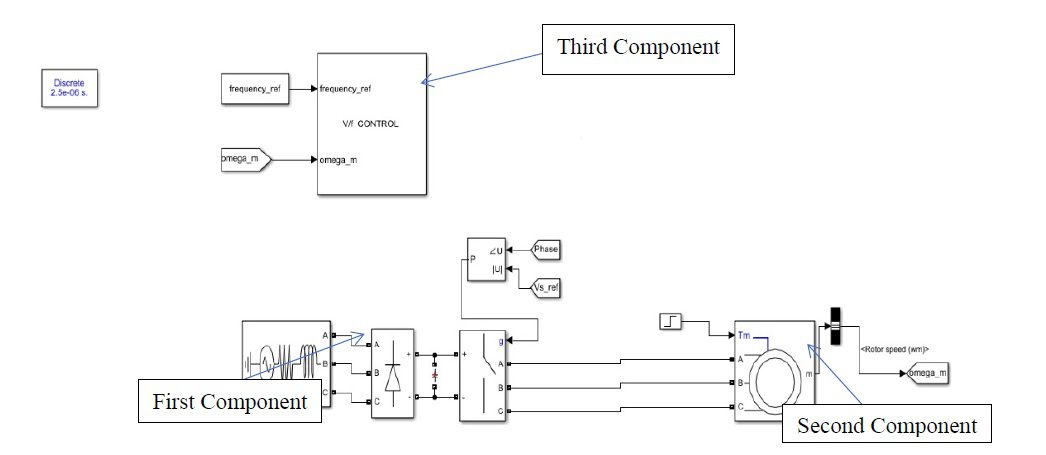
در شکل زیر مدل تکنیک کنترل V/f موتور القایی با استفاده از SVPWM نشان داده شده است.
نتایج:
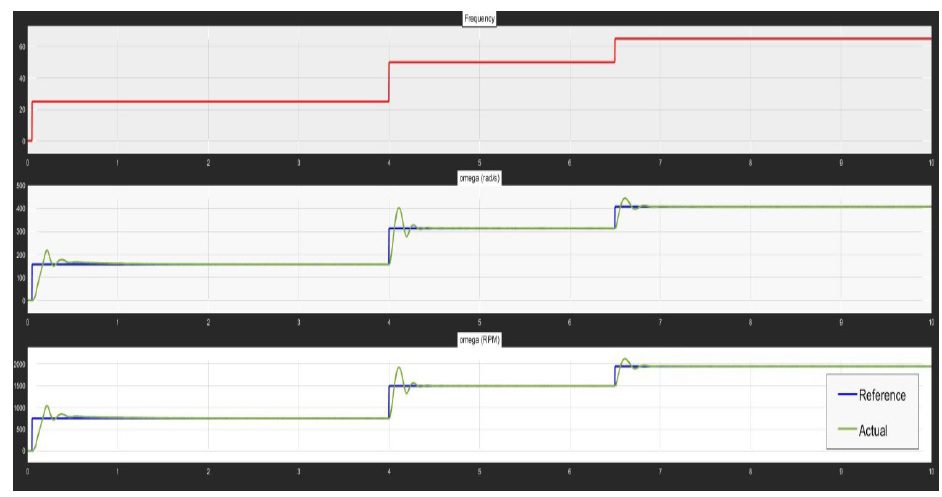
خروجی فرکانس، سرعت زاویه ای و سرعت روتور با بار گشتاور 2 نیوتن متر، KP 0.17 و K1 0.3288
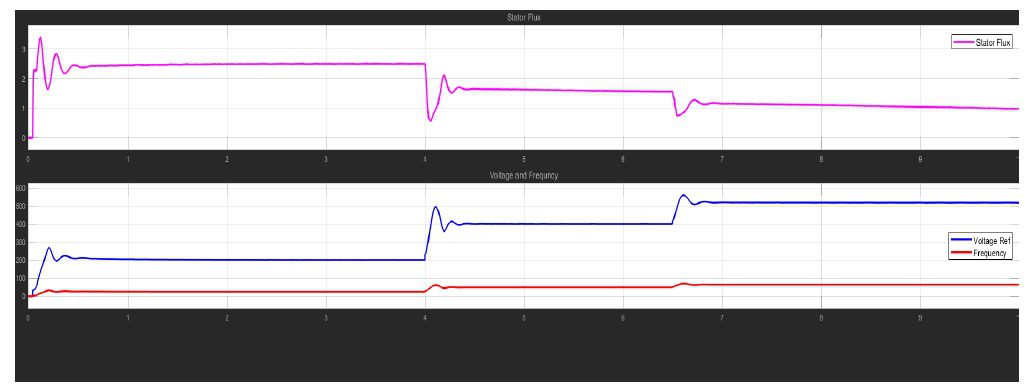
نتایج شار استاتور، ولتاژ و فرکانس با بار گشتاور 2 نیوتن متر، KP 0.17 و K1 0.3288.
دیاگرام بلوک های اصلی کنترل گشتاور مستقیم(DTC):
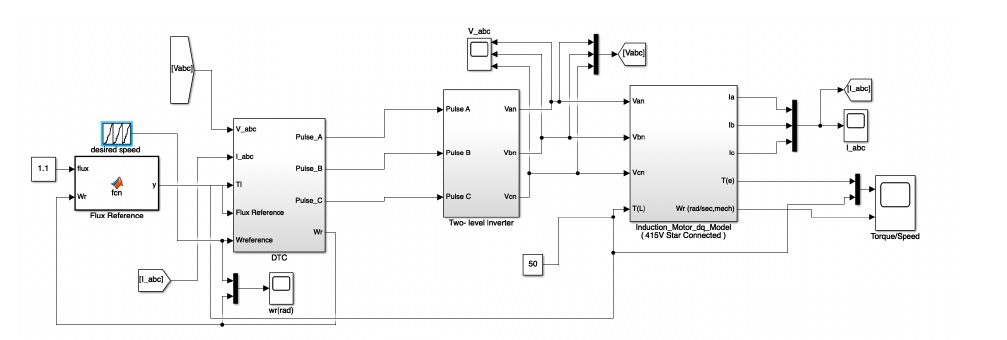
شکل کنترل DTC:
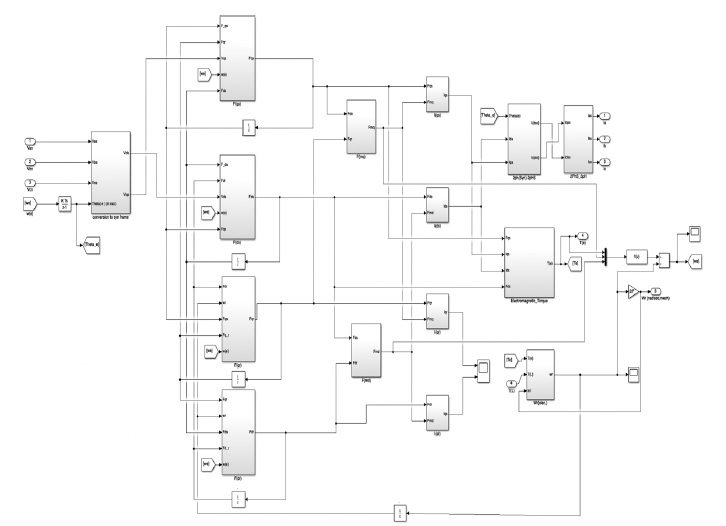
شکل مدل D-q موتور القایی سه فاز
شکل کنترل DTC با V/f :
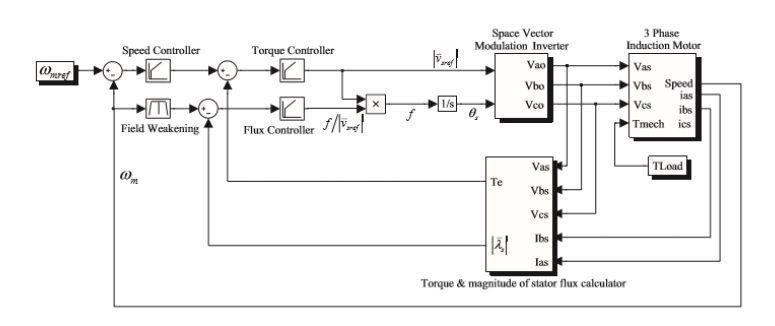
شکل مدل سیمولینک DTC با V/f:
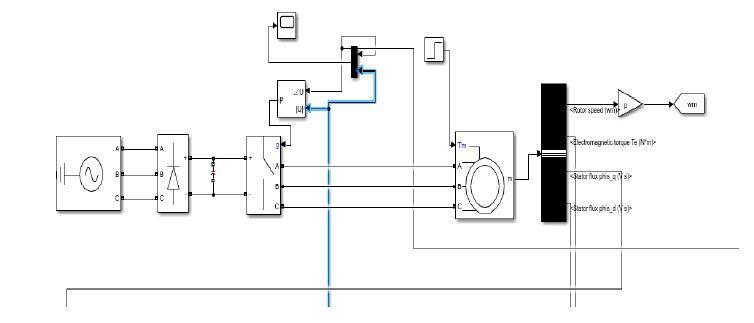
موتور القایی با SVPWM و اینورتر سه فاز با سه منبع فاز. خروجی های موتور القایی شامل سرعت روتور واقعی، گشتاور الکترومغناطیسی و شار استاتور مطابق قاب مرجع ساکن است.