توضیحات
پروژه شبیه سازی موتور مغناطیس دائم بدون جاروبک AC یا BLAC و کنترل محرکه(درایو) موتور در نرم افزار انسیس مکسول(Ansys Maxwell) و Ansys Simplorer
موتورهای الکتریکی(Electric Motors):
موتورهای الکتریکی امروزه به عنوان یکی از عمده ترین مصرف کنندگان توان الکتریکی تولیدی توسط نیروگاه های تولید برق شناخته می شوند. حدود ۴۰ درصد برق تولیدشده، بوسیلة انواع مختلف موتورهای الکتریکی مصرف می شوند. از طرف دیگر با گسترش کاربرد محرکه های الکتریکی در صنایع پیشرفته و خطوط تولید سرعت متغیر درصد زیادی از این موتورها در کاربردهای سرعت متغیر به کارگرفته شده اند و تقریباً در تمامی آنها از یک مبدل توان برای ایجاد تغذیه مناسب برای موتور استفاده گردیده است. محرکه های الکتریکی دارای تنوع چشمگیری بوده که این تنوع برای هر موتور نیز به طور جداگانه وجود دارد. در شکل زیر انواع موتورهای الکتریکی مورد استفاده در کاربردهای مختلف را نشان می دهد که می توان آنها را در دو دسته بزرگ AC و DC تقسیم بندی نمود. تا دهه ۸۰ میلادی استفاده از انواع موتورهای DC علیرغم هزینه ساخت و نگهداری آنها تنها به دلیل سهولت در کنترل نسبت به موتورهای AC بسیار رایجتر بود. اما در دهه ۷۰ میلادی روش های کنترل برداری برای موتورهای AC توسعه یافتند. همچنین طی آن دهه نسل های جدید سوئیچ ها و نیمه هادی های قدرت بوجود آمدند. در کنار این جنبه ها توسعه پردازنده های سریع دیجیتالی طی دهه ی ۸۰ میلادی زمینه را برای پیاده سازی و تجاری سازی روش های کنترلی جدید برای انواع موتورهای AC فراهم ساختند. لذا شاهد آن بودیم که از دهه ۹۰ میلادی محرکه های AC بخصوص محرکه های موتورهای القایی به تدریج جایگزین محرکه های DC گردیدند و عملا آنها را از گردونه رقابت خارج ساختند.
طی دهه گذشته با کاهش قیمت مواد مغناطیسی طراحی و ساخت موتورهای بدون جاروبک و استفاده از آنها در کاربردهای توان پایین گسترش چشمگیری یافته است. از دلایل رویکرد مثبت به این نوع موتورها می توان به ویژگی های ممتازشان نظیر بهره بسیار زیاد چگالی توان و گشتاور بالا، هزینه نگهداری پایین، ساختار ساده و روش کنترل آسان اشاره نمود. این موتورها به دلایل فوق ابتدائاً در کاربردهای دقیق و عملکرد بالا نظیر تراکشن، حمل و نقل الکتریکی، هوافضا، صنایع نظامی، کامپیوتر و امثالهم مورد توجه قرار گرفتند اما اخیرا به دلیل نیازهای جدید در کاربردهای خانگی، تجاری و نیمه صنعتی و کاهش چشمگیر قیمت این موتورها، استفاده از موتورهای بدون جاروبک در کاربردهای فوق نیز گسترش بی سابقه یافته است. از کاربردهای مهم موتورهای بدون جاروبک، استفاده در خودروهای برقی و هیبریدی می باشد. اغلب شرکتهای معتبر خودروسازی دنیا برای رفع مشکل آلودگی ناشی از خودروهای احتراق داخلی و مصرف بهینه انرژی، طراحی و توسعه خودروهای برقی، هیبریدی و پیل سوختی را در دستور کار خود قرار داده اند که طراحی بهینه سیستم محرکه رانشی الکتریکی خودرو عمده ترین بخش در طراحی این خودروها است. اصلی ترین جزء سیستم محرکه رانشی الکتریکی، موتور الکتریکی و درایو مربوطه می باشد که موتور بدون جاروبک به دلایل ذکر شده می تواند اولین انتخاب باشد. همچنین در کاربردهای خاص و نظامی استفاده از این موتورها به دلایل ذکر شده و همچنین تولید گشتاور نرم و عدم ایجاد نویز و لرزش بسیار مورد توجه است.
موتورهای بدون جاروبک AC و DC:
موتورهای بدون جاروبک برحسب نوع ولتاژ فاز تغذیه به دو دسته بدون جاروبک AC یا (BLAC) با ولتاژ فاز تغذیه سینوسی و بدون جاروبک DC یا (BLDC) با ولتاژ فاز تغذیه ذوزنقه ای تقسیم بندی می شوند. نوع BLAC بیشتر با نام موتور آهنربای دائم سنکرون (PMSM) شناخته می شود.شکل زیر تقسیم بندی انواع موتورهای الکتریکی است.
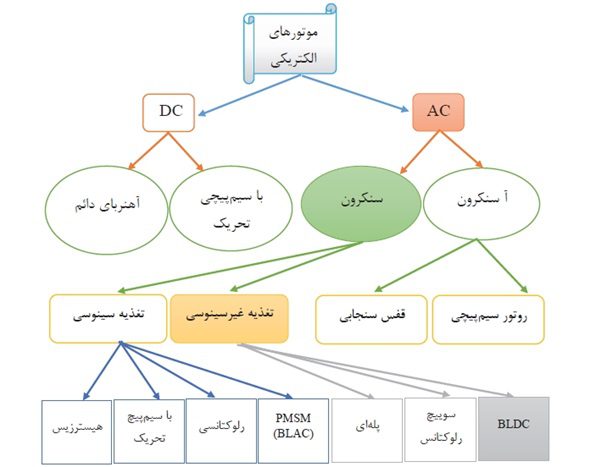
شکل تقسیم بندی انواع موتورهای الکتریکی.
مزایای موتور BLDC:
موتور BLDC به دلیل مزایای زیر در صنایعی نظیر خودرو سازی و صنایع فضایی کاربرد وسیع دارد:
نویز پایین:
در موتورBLDC از لحاظ مکانیکی به علت نبود جاروبک یا حلقه لغزان تمام نویز های مکانیکی به جز نویزهایی که در اثر اتصالات، بلبرینگ و بار هستند حذف می شوند.
راندمان بالا:
موتور BLDC داری راندمان مکانیکی بالایی می باشد. راندمان بالای موتور BLDC به علت وجود میدان حاصل از آهنربای دائم بوده که دارای شار تقریباً پیوسته و ثابتی است و درنتیجه هیچگونه میرایی در توان الکتریکی وجود ندارد. ویژگی مهم دیگر آهنرباهای دائم طول زیاد آن می باشد.
کاهش تلفات حرارتی:
در موتورهای BLDC آهنربای دائم روی روتور قرار گرفته است و فقط استاتور دارای سیم پیچی است، بنابراین فقط تلفات حرارتی مربوط به های استاتور وجود دارد.
طول عمر زیاد و نگهداری کم:
نبود جاروبک یا حلقه لغزان باعث افزایش طول عمر روتور شود و تنها عواملی که در طول عمر موتور تأثیرگذارند عایق بندی بلبرینگ ها و آهنربای دائم می باشند.
کنترل ساده و آسان:
در موتور BLDC گشتاور خروجی به طور مستقیم به جریان استاتور وابسته بوده و درنتیجه کنترل آن ساده می باشد.
معایب موتور BLDC:
هزینه آهنربای دائم:
هزینه های آهنربای دائم با چگالی انرژی بالا در کاربرد هایی که هزینه اولیه آنها باشد، استفاده از آنها را نفی می کنند. به طور معمول سرامیک ها هزینه کمتری داشته و دارای چگالی انرژی کمتری نیز هستند.
احتمال آهنربازدایی آهنرباهای دائم:
برای آنکه آهنربای دائم دچار آهنربا زدایی نشود، حفاظت بسیار بالا مورد نیاز است. عوامل مختلف از جمله حرارت می تواند باعث آهنربازدایی شود.
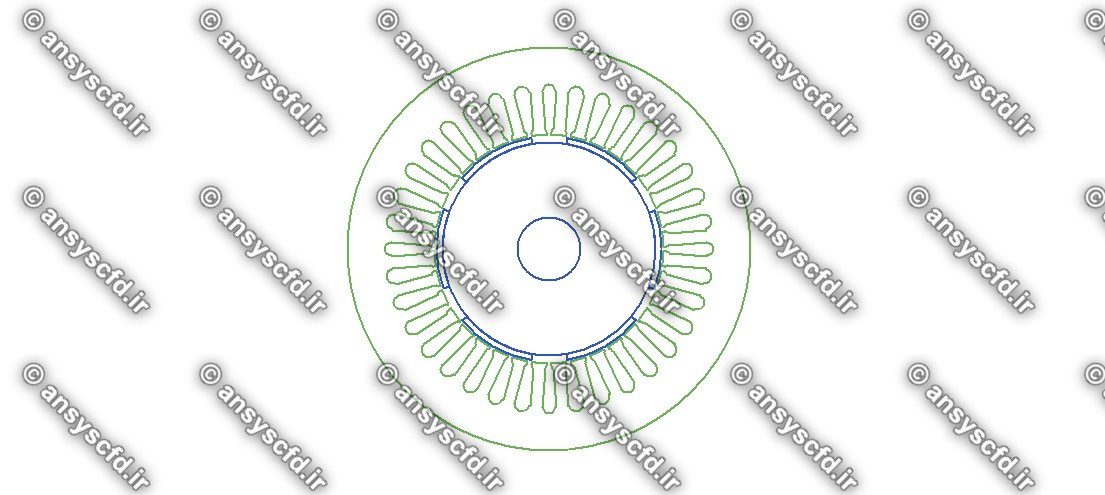
شکل زیر نمایی از ساختار موتورهای BLDC را نشان می دهد. شاکله اصلی یک موتور BLDC را، استاتور و روتور تشکیل می دهد. استاتور قسمت ساکن موتور بوده که سیم پیچ های سه فاز بر روی این قسمت نصب می شوند. روتور نیز بخش متحرک موتور را تشکیل می دهد. همچنین به منظور کنترل موتور، از حسگرهای مختلفی از جمله، حسگر اثر هال و حسگر سنجش موقعیت استفاده می شود. افزایش تقضا و مزایای فراوان، موتورهای بدون جاروبک را به سمت طرح های جدید از نظر پیکربندی و هندسه سوق داده است. یکی از این طرح ها، موتور BLDC بدون شیار می باشد. در این طرح درواقع موتور فاقد هسته استاتور می باشد. از جمله مزایای موتورهای BLDC بدون شیار به حداقل رساندن حجم موتور برای کاربردهای خاص، امکان استفاده از آهنربای خاص، پایین آمدن احتمال اشباع، کم شدن لرزش و نویز هنگام کار موتور می باشد.
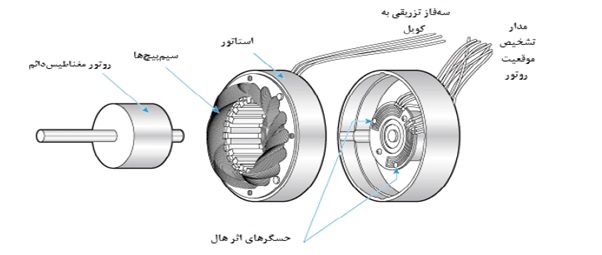
شکل ساختار موتور مغناطیس دائم بدون جاروبک.
شرح پروژه:
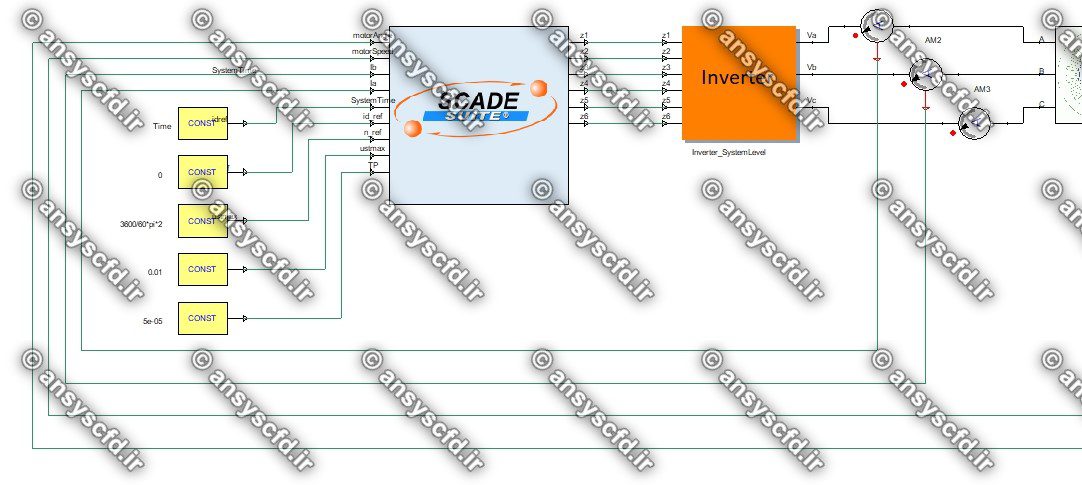
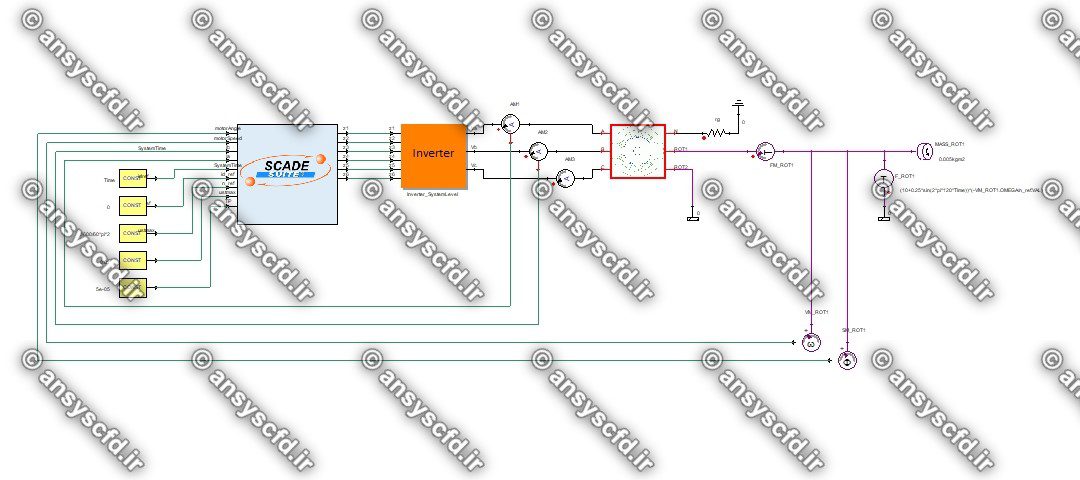
امروزه برای طراحی موتور و همچنین راستی آزمایی طراحی انجام شده، ابزارهای شبیه سازی مختلفی از جمله JMAG ،MagNet و RMxprt عرضه شده اند. با استفاده از این ابزارها می توان عملکرد ماشین را قبل از ساخت ارزیابی کرده و یا رفتار ماشین هنگام بروز خطا را سنجید. همچنین می توان به کمک شبیه سازی های متعدد و تغییر پارامترهای موتور طراح های بهبودیافته جدیدی برای موتورها یافت. در هنگام شبیه سازی ماشین عموماً دو دسته متغیر وجود دارند، متغیرهای مستقل یا ورودی و متغیرهای وابسته خروجی. متغیرهای مستقل را ابعاد موتور، تعداد دور سیم پیچ، مشخصات مواد به کار رفته و تشکیل می دهند. همچنین متغیرهای وابسته درواقع خروجی های طراحی مانند بازده و گشتاور می باشند. مهندسان طراحی ماشین با به کارگیری فرضیات مناسب و معادلات مربوطه متغیرهای ورودی را به دست می آورند. امروزه شبیه سازی ترکیبی راهی اثبات شده برای درک بهتر و توانایی تحلیل فیزیکی ماشین های پیچیده می باشد. منظور از شبیه سازی ترکیبی استفاده از اتصال دو یا چند نرم افزار، به منظور استفادة همزمان از ویژگی همه آنها می باشد. در این پروژه نرم افزار انسیس مکسول( Ansys Maxwell) و انسیس سیمپلورر( Ansys Simplorer) به هم متصل شده اند. بر این اساس طراحی موتور الکتریکی در نرم افزار انسیس مکسول Maxwell صورت می گیرد. همچنین طراحی کنترل موتور در Simplorer انجام شده و با اتصال این دو ابزار سیستم محرکه موتور پیاده سازی خواهد شد.
نرم افزار انسیس مکسول(Ansys Maxwell):
نرم افزار Ansys Maxwell نرم افزاری کاربردی جهت طراحی، شبیه سازی و آنالیز مدارهای مغناطیسی و الکترومغناطیسی نظیر انواع موتور، ژنراتور و ترانسفورماتور می باشد. یکی از امکاناتی که این نرم افزار جهت شبیه سازی در دسترس قرار داده است محیط RMxprt می باشد. در این محیط به صورت پیش فرض موتورها و ژنراتورهای معمول قابل اتخاب هستند و بنا به طراحی انجام شده می توان تغییرات لازم را در آنها ایجاد کرد. انسیس مکسول(ANSYS MAXWELL)، یک نرم افزار قدرتمندی است که از تحليل المان محدود برای حل مسائل الکتریکی با مغناطیسی استفاده می کند. این نرم افزار با حل معادلات ماکسول در دامین طراحی شده و اعمال شرایط مرزی مناسب به همراه شرایط اولیه تعیین شده توسط کاربر، میدان های الکترومغناطیسی را حل می کند. با توجه به حل گر انتخاب شده در تنظیمات مسأله، معادلات متناظر حل خواهند شد. حل گره های موجود در نرم افزار ماکسول شامل: حل گر الكترومغناطيس، الكترواستاتیک، جریان گردابه ای و مغناطیسی گذرا، می باشند.
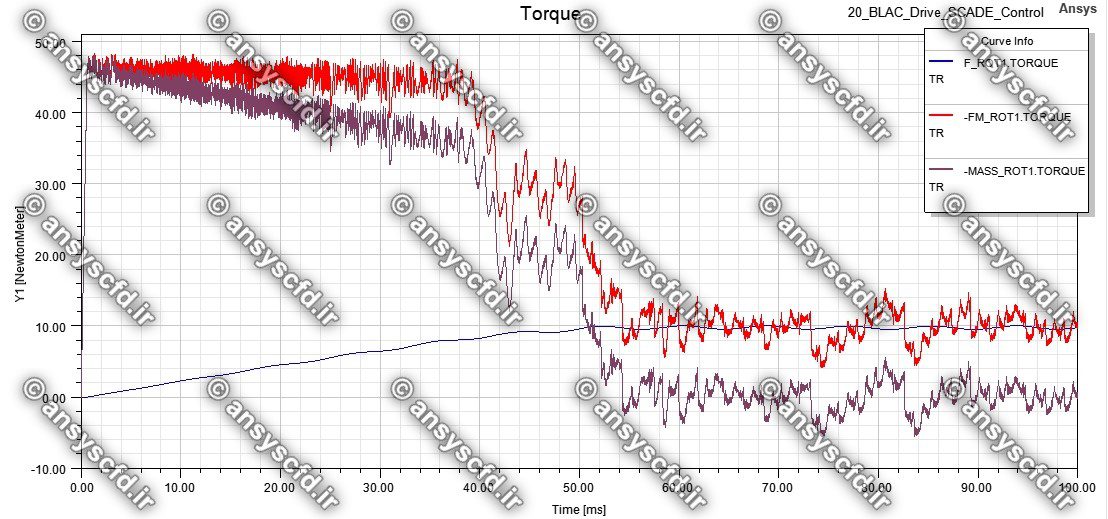
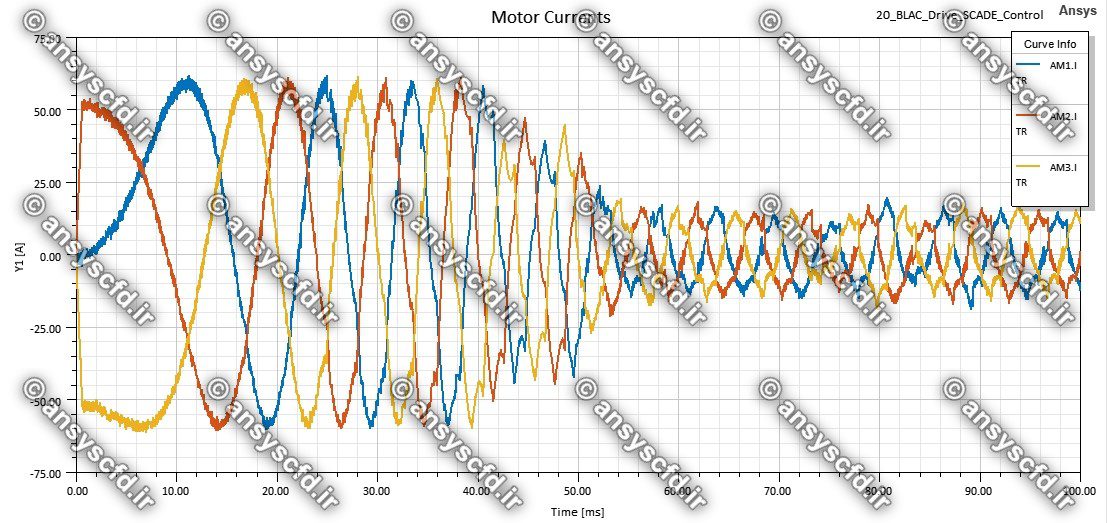
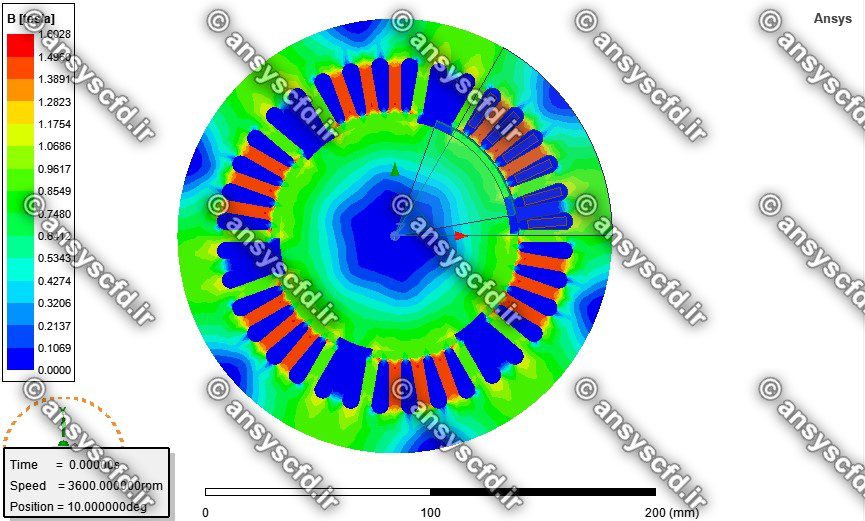
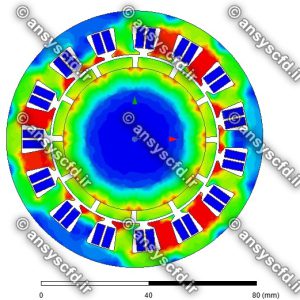
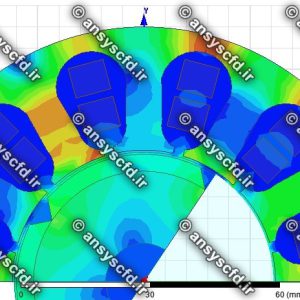
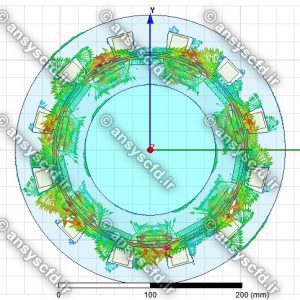
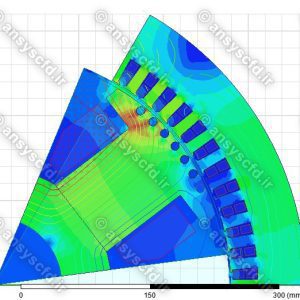
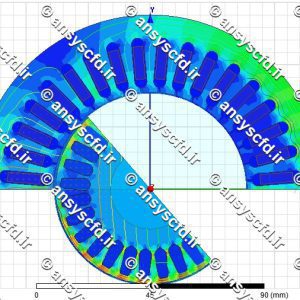
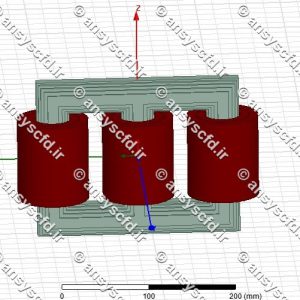
نمونه نتایج شبیه سازی: