توضیحات
پروژه شبیه سازی و سیمولینک متلب کنترل سرعت موتورهای القایی سه فاز قفس سنجابی به روش کنترل برداری(FOC)
موتورهای القایی به دلیل استحکام ، عملکرد مناسب، قابلیت اطمینان و قیمت کم امروزه یکی از مهمترین محرکه های سیستم های صنعتی محسوب می شوند. به همین دلیل در سیستم های صنعتی استفاده از روش های مناسب کنترل دور موتورهای القایی با کارایی خوب یکی از مهمترین مسائلی است که باید به آن پرداخته شود. مبحث کنترل موتورهای القایی از سال ۱۹۷۱ توجه محققان و مهندسان را به خود جلب کرد. از آن زمان تا کنون بیش از ۴۰۰۰ مقاله چاپ شده در ژورنال های معتبر راجع به کنترل موتورهای القایی به چاپ رسیده است. اما هنوز تحقیقات در حوزه موتورهای القایی بسیار فعال است. در همین راستا بیش از ۳۰۰ مقاله چاپ شده در سال ۲۰۰۸ ارائه گردیده است. همچنین در حوزه صنعت بیش از ۸۰۰۰۰ اختراع در زمینه کنترل موتور القایی ثبت شده است. در دسترس بودن پروسسورهای دیجیتال قدرتمند، کم هزینه و پیشرفتهای برجسته در الکترونیک قدرت، موجب طراحی کنترل کننده های پیچیده و کارآمد برای این نوع از موتورها شده است. موتورهای جریان مستقیم به طور گسترده در کاربردهای سرعت متغیر به کار می روند زیرا شار و گشتاور آنها به طور مستقل توسط میدان و جریان آرمیچر کنترل می شود. با این وجود این موتورها به دلیل استفاده از کموتاتورهای مکانیکی و جاروبک ها دارای قابلیت اطمینان کم و عمر کوتاه هستند. به گونه ای که در شرایط کاری سرعت بالا و ولتاژ زیاد کاربرد آنها عملا محدود می شود. کنترل موتورهای القایی بسیار سخت تر است اما مزایای بارزی نسبت به موتورهای جریان مستقیم دارند زیرا این نوع از موتورها کموتاتور، جاروبک و در برخی از انواع آن سیم پیچی روتور ندارند (نوع موتورهای قفسه سنجابی). ساختار این موتورها به گونه ای است که می توانند بار اضافی را تحمل کنند. همچنین این موتورها می توانند گشتاورهای بالاتری را با وزن کمتر و اندازه ی کوچکتر و جرم در حال دوران کمتر نسبت به موتورهای جریان مستقیم تولید کند.
موتور القایی بدلیل داشتن رفتار دینامیکی غیرخطی در مقابل رفتار خطی موتور DC نیازمند سیستم کنترلی بسیار پیچیده تر و و گران تر می باشد این امر باعث شد تا سالها موتورهای DC در صنعت حمل و نقل ریلی به عنوان انتخاب اول مطرح باشند. در سالهای اخیر و با توجه به پیشرفتهای انجام شده در زمینه نیمه هادی، تولید قطعات و تجهیزات الکترونیکی و به بازار آمدن ریز پردازنده های قدرتمند با قابلیت های کنترلی مناسب، این امکان پدید آمده است که بتوان کنترل بسیار پیچیده ماشین های القایی را در کاربردهای سرعت متغیر به صورت ساده تر و اقتصادی تری پیاده سازی نمود. با توجه به نیاز پیشرفت روزافزون صنعت حمل و نقل ریلی و رواج هر چه بیشتر قطارهای سریع السیر و نیاز ضروری بشر به این صنعت لزوم انتخاب روشی مناسب جهت کنترل دور موتورهای القایی مورد استفاده در این وسایل روز به روز نمایان تر گردید.
یکی از کاربردهای عمده موتورهای القایی در بحث حمل و نقل ریلی است و این موتورها به دلیل عدم استفاده از جاروبک نسبت به موتورهای جریان مستقیم برتری دارند و کم کم در صنعت ریلی به دلیل هزینه تعمیر و نگهداری کمتر جایگزین ماشین های جریان مستقیم شدند. بنابراین با توجه به کاربرد فراوان موتورهای القایی در صنعت حمل و نقل ریلی، انتخاب روش کنترلی مناسب جهت کنترل این موتورها امری ضروری به نظر می رسد. روش های کنترلی FOC و DTC که از روش های مدرن و کارامد جهت کنترلی می باشند که می توانند جهت کنترل موتورهای القایی مورد استفاده در حمل و نقل ریلی به کار گرفته شوند.
تاکنون سه روش کلی کنترل برای موتورهای القایی به کار رفته است: کنترل اسکالر، کنترل مستقیم گشتاور (DTC)، کنترل برداری (FOC).
موتورهای القایی از محرکه های اصلی صنعت و کارخانجات می باشند. موتورهای القایی در مقابل موتورهای جریان مستقیم برای ساخت آسان تر و از لحاظ هزینه ارزانتر می باشند. از ویژگی های این موتور مستحکم بودن، قابلیت کارکرد در محیطهای مختلف صنعتی، بازدة رضایت بخش و نیاز به هزینه نگه داری کم میباشد. ولی سرعت این موتورها به آسانی موتورهای جریان مستقیم قابل کنترل نیست. غالب روش هایی که برای کنترل سرعت موتورهای القایی پیشنهاد شده است از مشکل تغییر پارامترهای مختلف درایو رنج می برند. در این میان، تغییرات اندازه مقاومت های استاتور و روتور در عملکرد یک درایو القایی، بخصوص در کاربردهای کنترل سرعت، تاثیر بیشتری نشان میدهد. بیشتر روش های تخمین سرعت وابستگی مستقیم به مقاومت روتور داشته و تخمین غیر صحیح این مقاومت، سبب ایجاد خطا در سرعت تخمین زده شده، عملکرد نامناسب درایو، و حتی ناپایداری کنترل کننده می گردد. مقاومت استاتور نیز تاثیر خود را در سرعتهای کم و در تخمین شار دور مغناطیسی استاتور بخوبی نشان می دهد، و آشکارسازی بهنگام مقدار دقیق آن در این سرعت ها اجتناب ناپذیر می باشد. بنابراین باید به دنبال طراحی کنترل کننده هایی باشیم که تا حد امکان نسبت به پارامترهای سیستم حساس نبوده و نسبت به تغييرات ممان اینرسی و اصطکاک پاسخ مقاومی داشته باشند. موتورهای القایی به دلیل قابلیت اطمینان، استحکام و قیمت کم، امروزه یکی از مهمترین محرکه های سیستم های صنعتی محسوب میشوند. با این وجود مبحث کنترل این موتورها به دلیل وجود دینامیک های تزویج شده چند ورودی با پیچیدگی های خاصی همراه است. با پیشنهاد روش کنترل برداری در اواخر دهه هفتاد امکان کنترل مستقل گشتاور و شار مغناطیسی برای این موتور فراهم آمد.
از آنجائیکه موتورهای القایی از نظر هزینه و سادگی ساخت نسبت به ماشین های جریان مستقیم ارجحیت دارند، به طور وسیعی در صنعت امروزه مورد استفاده قرار گرفته اند، لذا کنترل این موتورها از اهمیت بالایی برخوردار می باشد. کنترل موتورهای القایی مانند کنترل موتور جریان مستقیم ساده نیست زیرا موتورهای القایی ساختار و معادلات چند متغیره وابسته و غیرخطی دارند. روش های پیشرفته کنترل این موتورها اغلب با کنترل فرکانس هستند که می توان به روش های زیر اشاره نمود.
1- روش کنترل ولتاژ به فرکانس ثابت یا روش اسکالر(v/f ثابت).
2-روش کنترل برداری یا روش جهت دهی میدان(FOC).
3-روش کنترل مستقیم گشتاور (DTC).
موتورهای القایی برخلاف موتورهای جریان مستقیم دارای معادلات دینامیکی غیرخطی وابسته به زمان بوده و کنترل آنها به سادگی کنترل موتورهای DC میسر نمی باشد. لذا روش های کنترل قدیمی این موتورها در اغلب کاربردهای سرعت متغیر امروزی فاقد کارآیی لازم هستند. با توسعه فناوری نیمه هادی ها و پیدایش پردازنده های دیجتالی سریع، امروزه اغلب سیستم های درایو و کنترل سرعت این موتورها از نوع فرکانس متغیر هستند.
روش کنترل اسکالر (یا v/f ثابت):
این روش اولین روشی است که عملکرد حالت دائم مناسبی در درایوهای سرعت متغیر دارد و در صنعت امروزه هم مورد توجه فراوانی قرار گرفته است. در این روش تنظیم اندازه فرکانس یا ولتاژ را با هیچ نگرانی در مورد مقادير لحظه ای داریم که برای این کار نیاز به دانستن پارامترهای موتور نیست که یک روش کنترل حلقه باز می باشد. درنتیجه این روش ساده و کم هزینه می باشد و برای برنامه ها با کارایی کم مثل فن و پمپ ها استفاده می شود. اما این روش در کاربردهای با عملکرد بالا و در حالت گذرا، عملکرد مناسبی ندارد.
کنترل مستقیم گشتاور(DTC):
کنترل مستقیم گشتاور(DTC) را می توان در درایوها فرکانس متغیر برای کنترل گشتاور موتور القایی و درنهایت کنترل سرعت موتور القایی مورد استفاده قرار داد. این روش کنترل ممکن است به ریپل گشتاور موتور القایی منجر شود. کنترل برداری(FOC) یک روش کنترل درایو فرکانس متغیر است که برای کنترل موتورهای AC سنکرون و آسنکرون استفاده می شود. در مقایسه با کنترل DTC، کنترل برداری FOC برای کنترل حرکت موتور القایی مناسبتر است.
روش کنترل برداری (FOC) :
روش کنترل برداری(FOC) یک روش کنترل با رفتار دینامیکی مناسب و عملکرد بالا محسوب می شود که اولین بار توسط آقای بلاشکه در سال ۱۹۷۱ ابداع شد. این روش، کنترل موتور القایی با آن معادلات غیرخطی را همانند یک موتور DC تسهیل می سازد. این روش هم اینک هم در بسیاری از درایوهای تجاری و صنعتی مورد استفاده قرار می گیرد. اما حجم محاسبات بالای روش کنترل برداری و وابستگی زیاد این روش به مدل پارامترهای موتور، از معایب این روش است.
لذا ایده کنترل بلاواسطه گشتاور به جای کنترل گشتاور با استفاده از حلقه های کنترل جریان اولین بار در سال ۱۹۸۴ توسط آقای تاکاهاشی منجر به معرفی روش جدیدی موسوم به کنترل مستقیم گشتاور (DTC) شد. روش DTC در پیاده سازی از روش کنترل برداری ساده تر بوده و پاسخ دینامیکی مناسبی هم دارد.
در حال حاضر از روش های v/f ثابت و FOC در کنترل موتورهای القایی استفاده می شود و روش DTC در حال به دست آوردن سهمی در کنترل موتور القایی میباشد.
در دو دهه اخیر تلاش های زیادی برای الگو گرفتن از کنترل موتورهای DC و بکارگیری آن در کنترل موتورهای AC انجام گرفته که منجر به پیدایش کنترل برداری (FOC ) شده است. آقای پارک در سال ۱۹۲۹ مبحث قاب های مرجع چرخان را معرفی نمود. بعد از چند سال روش کنترل برداری یا FOC توسعه یافت که منجر به دکوپله سازی گشتاور و شار مشابه موتور DC تحریک مستقل شد. در سال ۱۹۶۸ مفهوم کنترل برداری غیرمستقیم توسط آقای هیس ارائه شد. در سال ۱۹۷۱ روش کنترلی FOC توسط آقای بلاشک با تاکید بر جهت دهی شار رتور معرفی شد. از آن بعد تکنیک های مختلفی برای بهبود این روش مطرح شد. قبل از پیدایش کنترل برداری، موتورهای AC با وجود استحکام خوب، قیمت مناسب و پایین بودن اینرسی روتور نمی توانستند با موتورهای DC که برای کاربردهای دقیق نظير سرو موتورها ، رباتیک و … مورد استفاده قرار می گیرند، رقابت کنند و این به خاطر راحتی کنترل موتورهای DC در مقایسه با موتورهای AC است. با ظهور کنترل برداری، کنترل موتورهای با ایجاد کانال های مستقل کنترل شار و گشتاورAC مشابه کنترل موتورهای DC گشته است. به بیان دیگر در این روش هدف این است که شار و گشتاور موتور القایی مستقل از یکدیگر و همانند موتور DC کنترل گردند. درواقع در این روش با جهت دهی مناسب بردار شار روتور یا استاتور و یا شار فاصله هوایی در راستای محور 4 دستگاه دو محوری dq به هدف فوق دست می یابیم.
با فرض ثابت بودن موقعیت زاویه ای شار روتور نسبت به قاب مرجع گردان، فازور جریان استاتور به دو مؤلفه همسو با شار روتور وعمود بر آن تجزیه می شود . مؤلفه همسو با شار، جریان تولید کننده میدان (if) و مؤلفه عمود بر آن، جریان تولید کننده گشتاور است (iT) تجزیه جریان استاتور نیازمند اطلاع از موقعیت شار روتور است که با ρ نشان داده می شود. این زاویه ی شار می تواند مستقیما در کنترل برداری مستقیم اندازه گیری شود یا در روش کنترل برداری غیر مستقیم محاسبه شود. عدم نیاز به سنسورهای زاویه ی شار و امکان کار در سرعت های پایین، کنترل برداری غیر مستقیم را در مقایسه با کنترل برداری مستقیم کاربردی تر کرده است . عيب عمده این نوع کنترل وابسته بودن آن به پارامترهای ماشین است چرا که پارامترهای ماشین در محاسبه شار مورد استفاده قرار می گیرد. پارامترهای ماشین با تغییر دما، تغییر فرکانس و با اشباع هسته تغییر می کنند. هرگونه تغییر در پارامترهای موتور موجب عدم مطابقت پارامترهای آن با پارامترهای مورد استفاده در کنترل برداری شده و باعث تضعیف عملکرد سیستم در حالت ماندگار و ایجاد نوساناتی در حالت گذرا در شار روتور، گشتاور و سرعت موتور می شود. این امر موجب کاهش بازده می شود همچنین وجود این نوسانات در سرعت موتور برای کاربردهای دقیق مطلوب نیست.
در روش FOC یک جهت دهی مناسب بردار شار رتور با مشخصه گشتاور مناسب، زمانی حاصل می شود که کنترلر مقادیر پارامترها را در هر لحظه داشته باشد.
شرح پروژه:
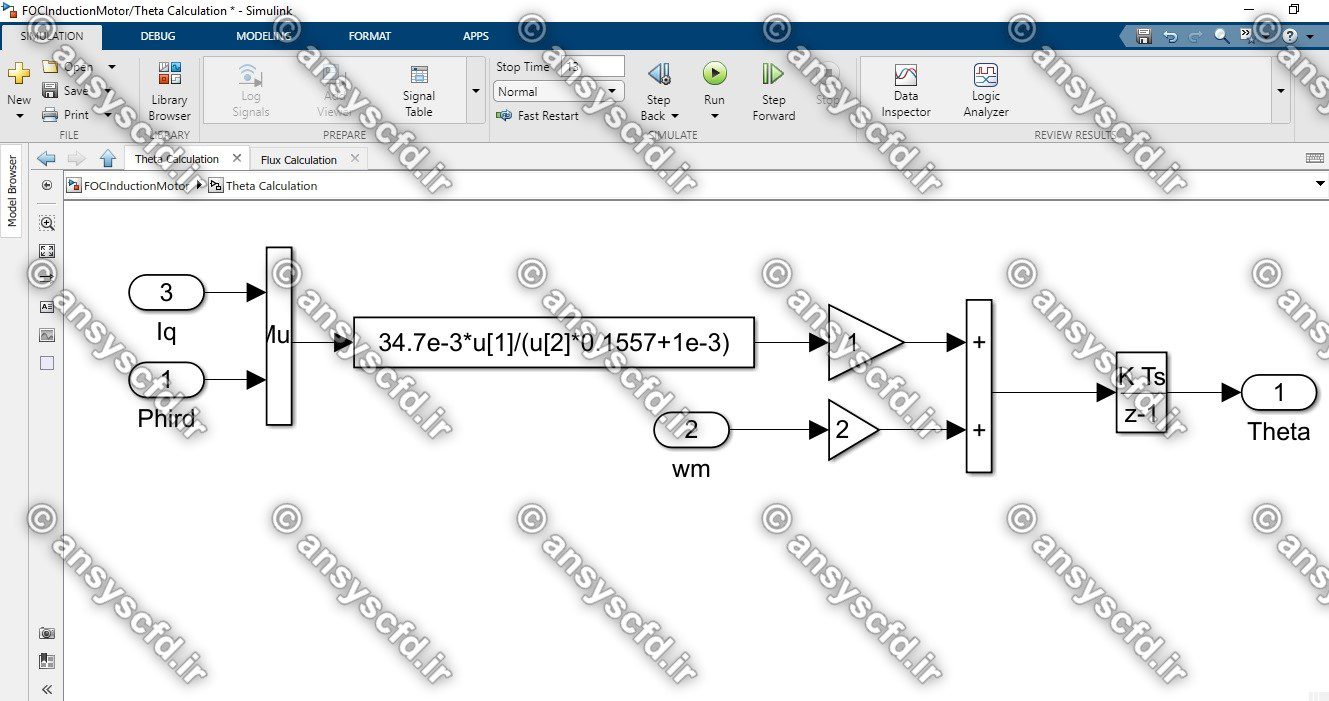
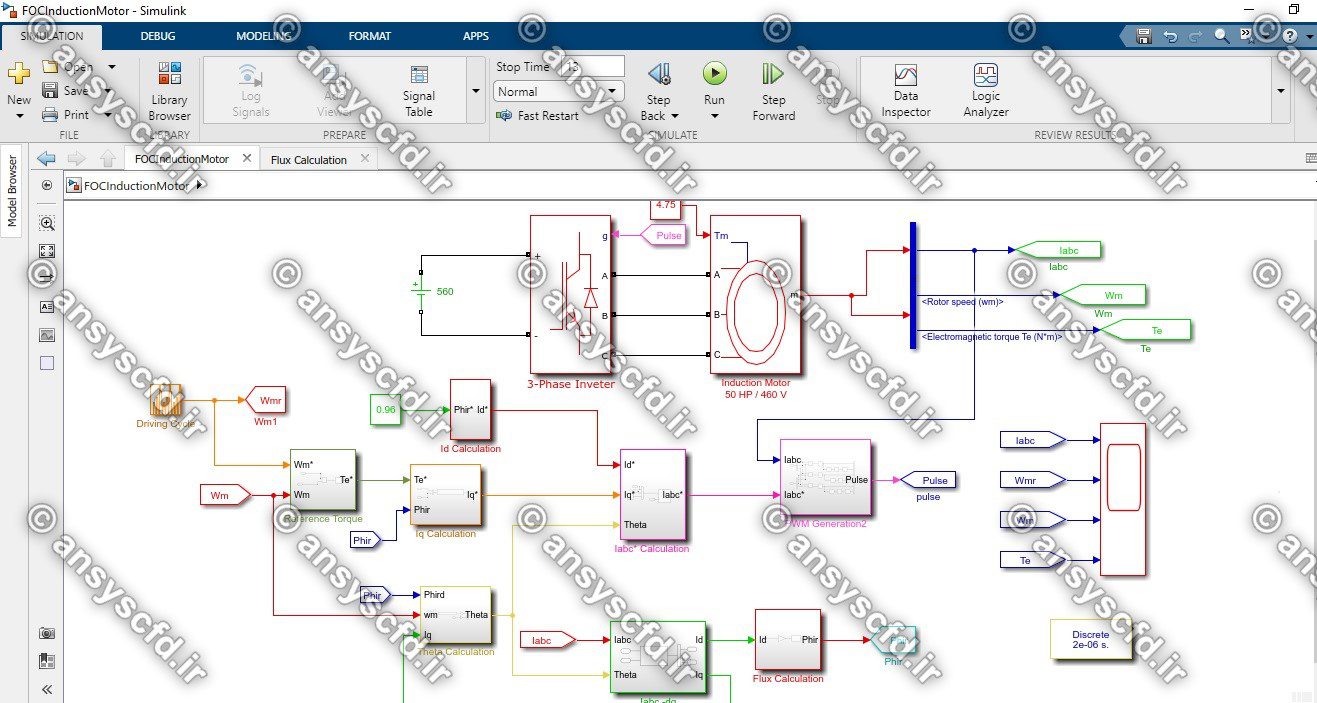
در این پروژه شبیه سازی و سیمولینک متلب کنترل سرعت موتورهای القایی سه فاز قفس سنجابی به روش کنترل برداری(FOC) انجام شده است.
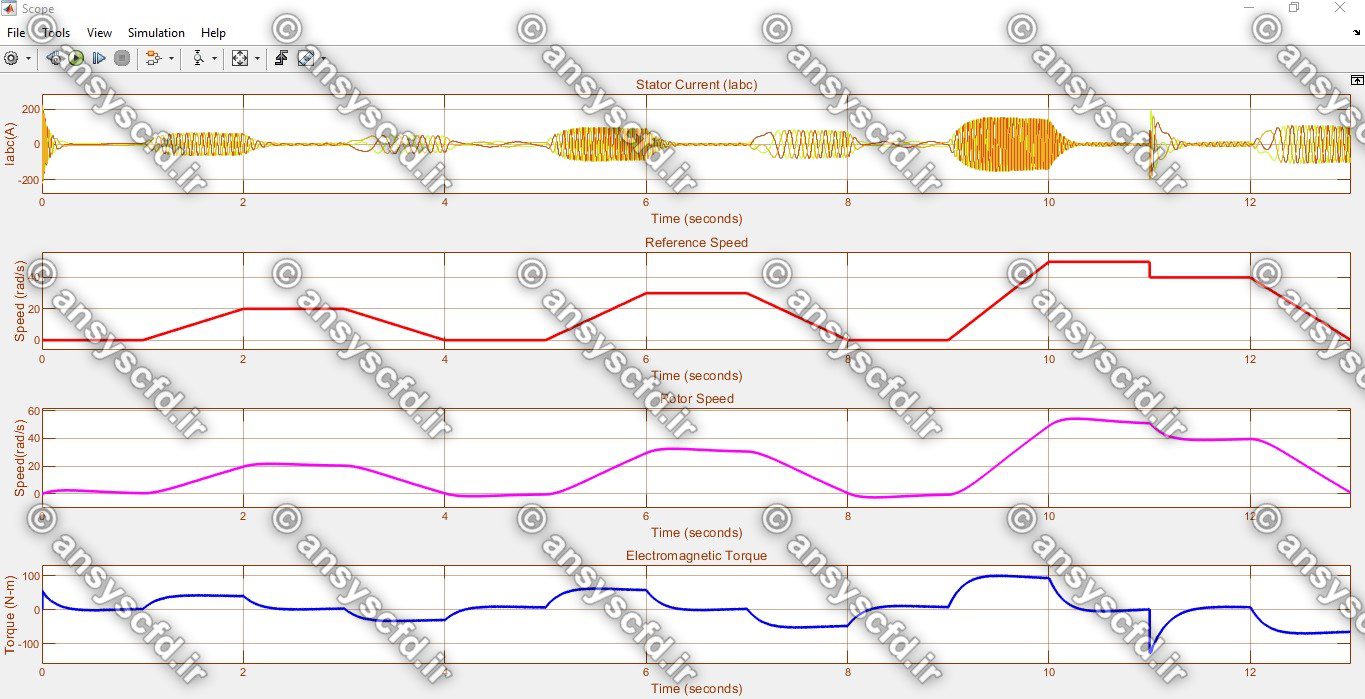
نتایج شبیه سازی (جریان استاتور، سرعت مرجع، سرعت روتور، گشتاور الکترومغناطیسی)
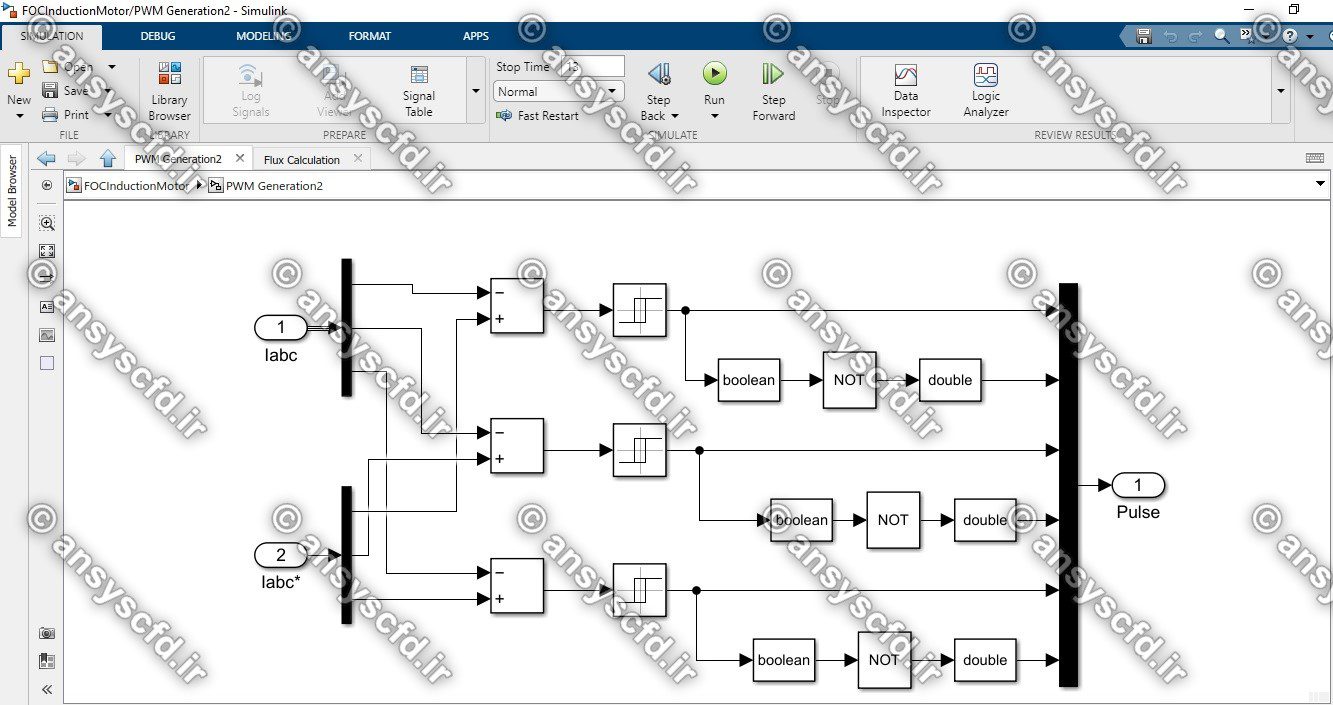
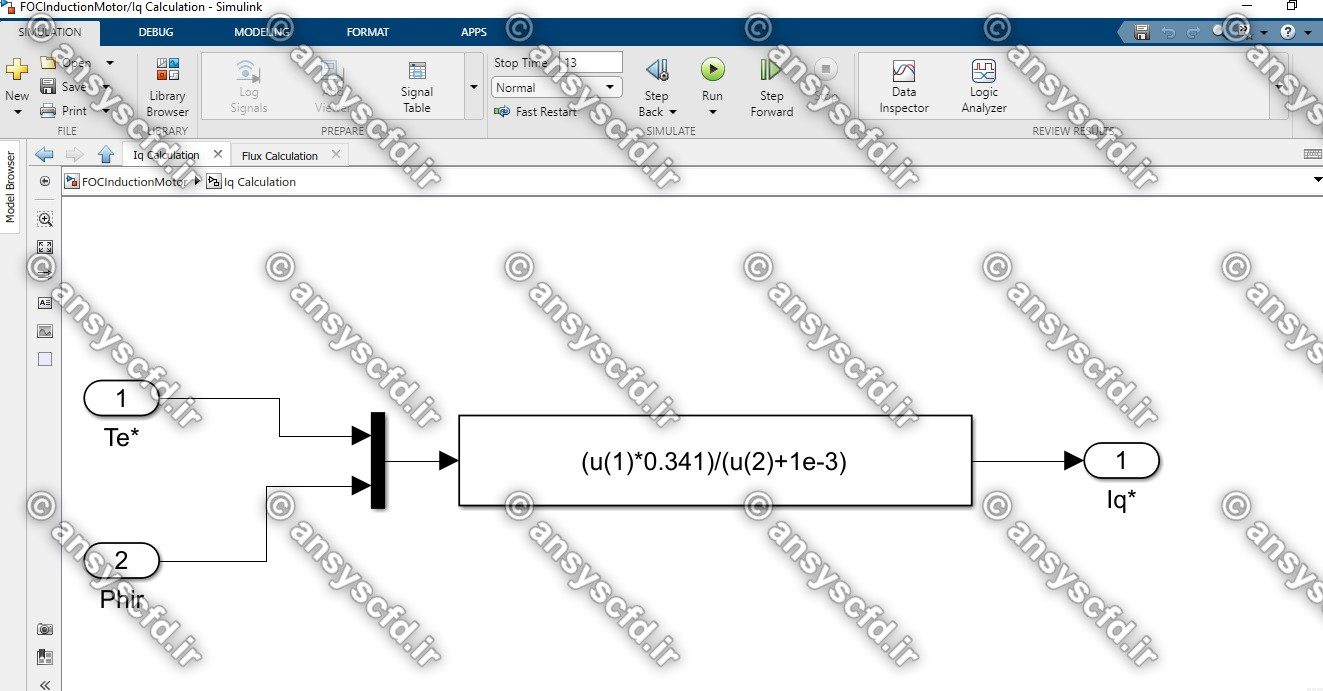
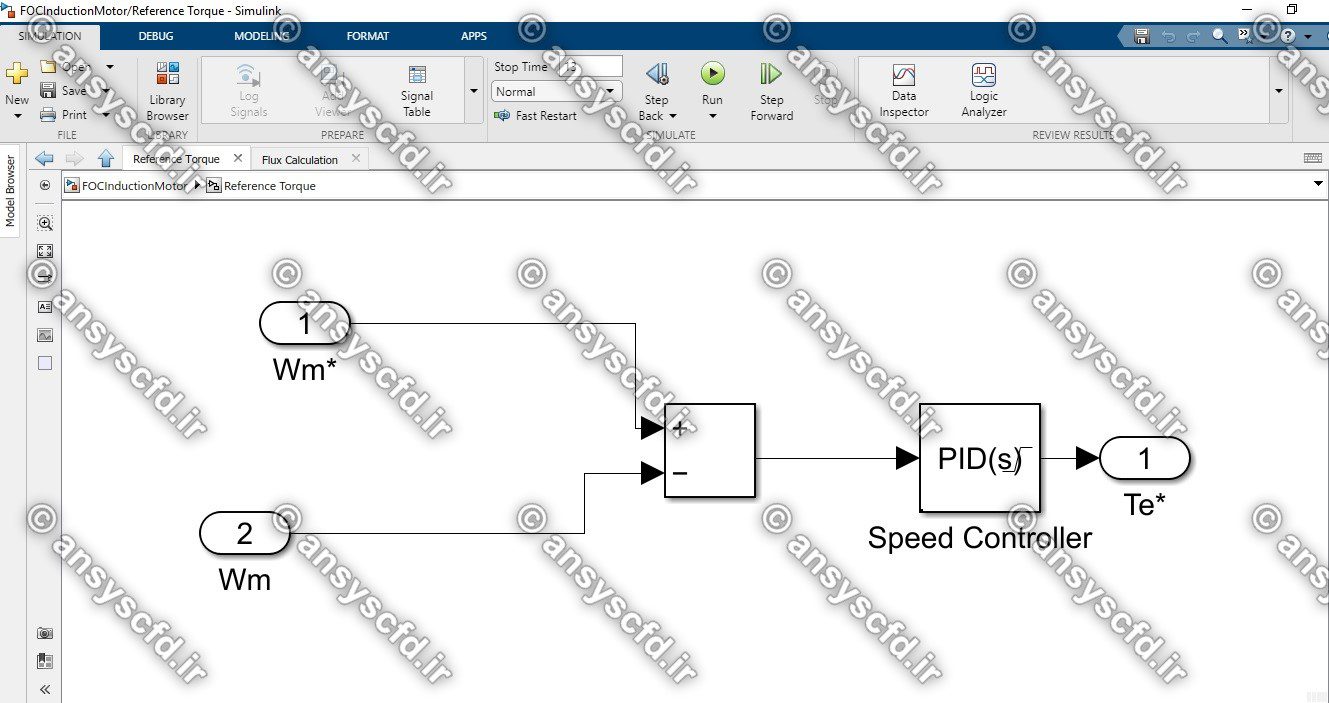
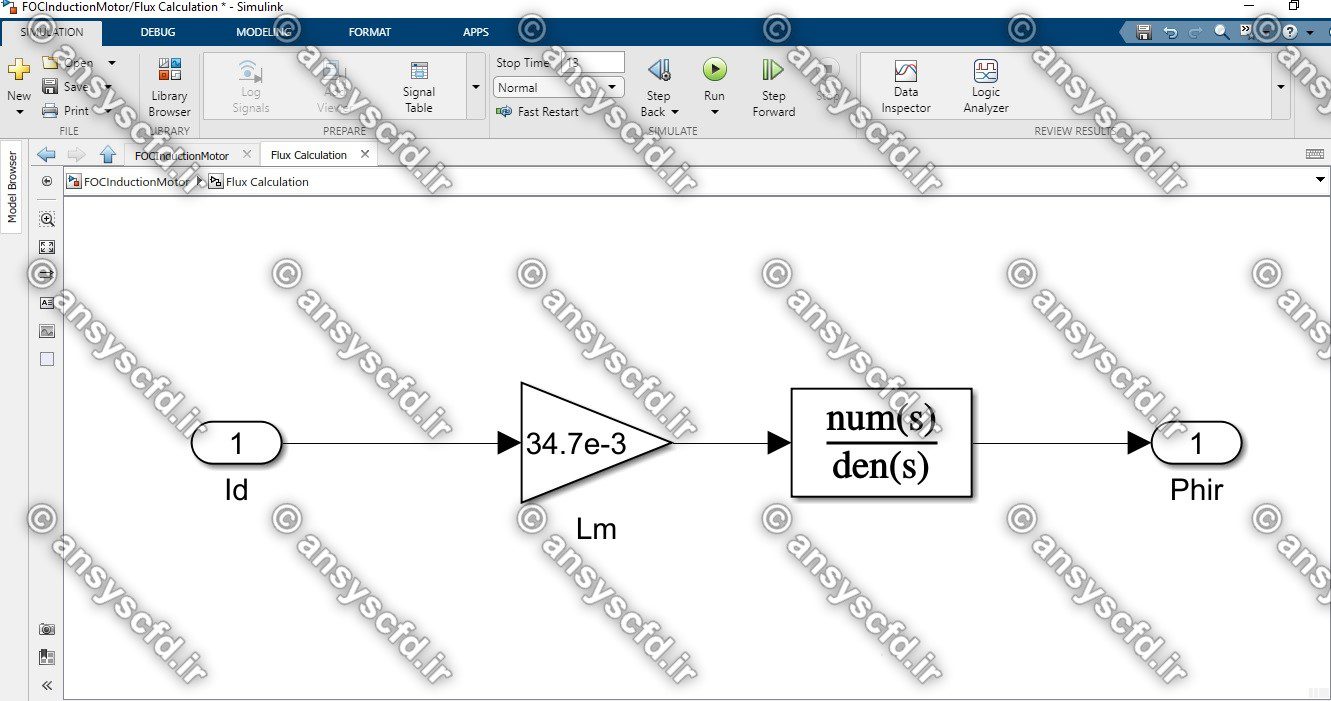
سایر بلوک های شبیه سازی: