




توضیحات
پروژه متلب تحلیل دینامیکی پایداری سیستم های قدرت با استفاده از پایدارساز سیستم قدرت(PSS) برای سیستم چندماشینه در شبکه 9 شینه و 68 شینه IEEE
دو کمیت مهم و اساسی در پایداری و بهره برداری از سیستم های قدرت، ولتاژ و فرکانس است و پایدارسازهای سیستم قدرت(Power System Stabilizers) نیز ادواتی هستند که به منظور افزایش پایداری دینامیکی سیستم از لحاظ فرکانس به کار می روند. روش کلاسیک طراحی و تنظیم چنین کنترل کننده هایی مبتنی بر مدل دینامیکی خطی شده، حول نقطه کار معین می باشد که براساس شرایط بهره برداری(توان و ولتاژ) مشخص می شود ولی به دلیل تغییرات مداوم بار در سیستم و همچنین توسعه و تغییر درهم بندی شبکه، پارامترهای مدل مزبور تغییر می یابد به طوری که حفظ کارایی پایدارساز تحت شرایط تغییر یافته، استفاده از روشهای طراحی بهتر و کنترل کننده های مدرن تر را می طلبد. از حدود سال های 1950 تا1960 مهندسان قدرت شروع به اتصال شبکه های قدرت به شبکه های دیگر با استفاده از خطوط انتقال طوﻻنی کردند تا قابلیت اطمینان باﻻتر، بازده بیشتر در تولید و توزیع، و صرفه جویی بهتری داشته باشند. اما در اثر اینگونه اتصاﻻت مسایل دینامیکی بسیاری از جمله نوسانات فرکانس پایین مشاهده شد. نوسانات فرکانس پایین یک مسأله کاملا طبیعی در اکثر سیستم های قدرت بهم پیوسته می باشد بنابراین پایداری و میرایی آن از اهمیت بسیار باﻻیی بر خوردار می باشد. نوسانات فرکانس پایین یکی از مشکلات رایج در سیستم های قدرت میباشند و تأثیر زیادی بر قابلیت انتقال توان در این سیستم ها دارند. در دهه های اخیر اکثر شرکت های برق، برای میراسازی این نوسانات از پایدارساز سیستم قدرت استفاده کرده اند. پایدارساز سیستم قدرت یک کنترل کننده ی ژنراتور سنکرون میباشد که از طریق سیستم تحریک عمل کرده و میرایی لازم را برای این قبیل نوسانات در سیستم قدرت فراهم میکند.
میرایی نوسانات الکترومکانیکی سیستم قدرت نقش مهمی در بهبود پایداری سیستم ایفا می کند. در دهه های اخیر جهت میرایی این نوسانات، پایدارسازهای سیستم قدرت (PSS) با ساختار کلاسیک صنعتی به صورت گسترده مورد استفاده قرار گرفته اند. این پایدارسازها با پارامترهای ثابت و بر اساس مدل خطی شده سیستم حول یک نقطه کار نامی طراحی می شوند. با توجه به اینکه نقطه کار سیستم قدرت دائما در حال تغییر می باشد، بنابراین این PSSها ممکن است عملکرد مناسبی از خود نشان ندهند. سیستم های قدرت چند ماشینه، سیستم هایی از درجه بالا و غیرخطی هستند و پارامترهای آن ها ممکن است با شرایط کار تغییر کند. بنابراین جهت داشتن عملکرد کنترلی مناسب، سیگنال کنترلی بایستی یک تابع غیر خطی باشد. در سیستم قدرت که یک سیستم کاملا غیر خطی و متغیر با زمان می باشد، نقاط کار سیستم در شرایط گوناگون و زمان های مختلف به دلایلی اعم از تغییر بار و یا از دست رفتن ژنراتور و یا اغتشاشات متفاوت مانند اتصال کوتاه در خط و غیره تغییر می کند. امروزه در اغلب سیستم های قدرت مدرن، برای افزایش میرایی و بالا بردن قابلیت پایداری دینامیکی سیستم از پایدارساز سیستم قدرت استفاده می شود. پایداری سیستم قدرت و میرا سازی نوسانات فرکانس پایین از اهمیت بسیار بالایی برخوردار می باشدرشد روز افزون شبکه های قدرت به دلیل بهم پیوستگی مناطق همجوار و گستردگی شبکههای توزیع، آنالیز این شبکه را به منظور حفاظت، کنترل و قابلیت اطمینان بیشتر با اشکال جدی روبرو ساخته است. استفاده از معادل دینامیکی درجه پائینی که بتواند رفتار شبکه قدرت اصلی را به خوبی مدل کند راه حل بسیار مناسبی برای این مشکل می باشد.
یکی از مشکلات عمده در بهرهبرداری از سیستمهای قدرت، مسئله وقوع نوسانات فرکانس پایین در سیستم است. هنگامیکه یک سیستم قدرت تحت بارگذاری شدید مورد استفاده قرار میگیرد و ژنراتورهای سیستم هم دارای میرایی طبیعی کافی نیستند، احتمال وقوع پدیده نوسانات فرکانس پایین در سیستم بسیار زیاد است. این مسئله ما را مجبور می سازد برای حفظ پایداری دینامیکی سیستم، سطح بارگذاری آن را کاهش دهیم و این امر از نظر اقتصادی مطلوب نیست. راه حل دیگر برای غلبه بر مشکل نوسانات فرکانس پائین، استفاده از پایدارساز در سیستمهای قدرت است. در هنگام وقوع نوسانات فرکانس پایین در سیستم، یک پایدارساز مرسوم سیستم قدرت (CPSS) می تواند با تولید میرایی اضافی در سیستم موجب شود که نوسانات مذکور میرا شوند و پایداری سیستم حفظ گردد. اما چنانچه یک پایدارساز با پارامترهای ثابت برای تمام نقاط کاری یک سیستم قدرت مورد استفاده قرار گیرد، در این صورت وقتی شرایط کاری سیستم تغییر می نماید، این پایدار ساز ممکن است نتواند موجب میرا شدن نوسانات مذکور شود، در عوض ممکن است به ناپایداری سیستم نیز کمک نماید.
توسعه شبکههای قدرت نوسانات خود به خودی با فرکانس کم را، در سیستم به همراه داشته است. بروز اغتشاشهایی نسبتاً کوچک و ناگهانی در شبکه باعث بوجود آمدن چنین نوساناتی در سیستم می شود. در حالت عادی این نوسانات بسرعت میرا شده و دامنه نوسانات از مقدار معینی فراتر نمی رود. اما بسته به شرایط نقطه کار، مقادیر پارامترهای سیستم و تجهیزات بکار رفته ممکن است این نوسانات برای مدت طولانی ادامه یافته و در بدترین حالت دامنه آنها نیز افزایش یابد. امروزه جهت بهبود میرایی نوسانات با فرکانس کم سیستم، در اغلب شبکه های قدرت پایدارکننده های سیستم قدرت (PSS) به کار گرفته میشود.این پایدار کننده ها بر اساس مدل تک ماشین – شین بینهایت سیستم در یک نقطه کار مشخص طراحی می شوند. بنابراین ممکن است با تغییر پارامترها و یا تغییر نقطه کار شبکه، پایداری سیستم در نقطه کار جدید تهدید شود.
پایدارساز سیستم قدرت (PSS) برای میراسازی نوسانات فرکانس پایین سیستم قدرت به کار میرود. با تغییرات شرایط عملکرد سیستم، نوسانات دامنهی کوچک و فرکانس پایین برای مدت زمان طولانیتری در سیستم باقی میمانند و در بعضی از موارد ظرفیت انتقال توان سیستم را با اختلال رو به رو میکنند. با افزایش سایز سیستمهای قدرت به همپیوسته و همچنین با تجدید ساختار صنعت برق، مشکلات مربوط به نوسانات فرکانس پایین به عنوان حوادث اصلی، به فراوانی گزارش شدهاند. در راستای حفظ پایداری سیستم و با افزایش روزافزون مصرف انرژی الکتریکی و قوانین تجدید ساختار، استفاده از تجهیزات کنترلی نظیر پایدارساز سیستم قدرت (PSS)، از اهمیت بیشتری برخوردار شده است. پایدارساز سیستم قدرت(PSS)، به عنوان کنترلکنندهی نوسانات مقرون به صرفه به صورت گسترده با هدف میراسازی نوسانات فرکانس پایین و بهبود پایداری دینامیکی سیستم استفاده شده است. سیستم قدرت که یک سیستم کاملا غیر خطی و متغیر با زمان می باشد و نقاط کار سیستم در شرایط گوناگون و زمانهای مختلف به دلایلی اعم ازتغییر بار ،از دست رفتن ژنراتور و یا اغتشاشات متفاوت مانند اتصال کوتاه در خط وغیره… تغییر می کند. امروزه در اغلب سیستم های قدرت مدرن، برای افزایش میرایی وبالا بردن قابلیت پایداری دینامیکی سیستم از پایدارساز سیستم قدرت استفاده می شود. پایداری سیستم قدرت و میرا سازی نوسانات فرکانس پایین از اهمیت بسیار بالایی بر خوردار می باشد. نوسانات الکترومکانیکی فرکانس پایین، کارکتراهای اجتناب ناپذیر سیستم های قدرت می باشند و آنها به طور وسیعی روی ظرفیت خطوط انتقال و پایداری سیستم قدرت اثر می گذارند. PSS و ادوات FACTS می توانند به میرایی نوسانات فرکانس پایین کمک کنند.
اغتشاشات همواره بر روی نوسانات سیستم قدرت تأثیرگذار بوده و بهبود اثر آنها برای سال های متمادی از مشکلات عمده صنعت برق به شمار می آمده است. این امر به ویژه در سال های اخیر با افزایش مصرف برق و نیز تجدید ساختار این صنعت و گرایش به بهره برداری بهینه اقتصادی که موجبات بهره برداری سیستم در نزدیکی مرزهای پایداری آن را فراهم نموده، تشدید شده است. اغتشاشات سیستم قدرت نظير: اتصال کوتاه، تغییر بار و … موجب ایجاد نوسانات فرکانس پایین می گردد که این نوسانات ماکزیمم توان انتقالی را محدود می سازد. پایداری سیستم قدرت از دو جنبه پایداری استاتیک و پایداری زاویه ای رتور مورد بررسی قرار می گیرد. اگر به یک سیستم قدرت چند ماشينه اغتشاش وارد شود، فرکانس، زاویه بار و ولتاژ تمام ژنراتورها دستخوش نوسان میشود. پایداری زاویه ای رتور توانایی ماشین های سنکرون به هم پیوسته یک سیستم قدرت است که در حالت سنکرون با یکدیگر باقی بمانند. در هنگام بروز اغتشاش در سیستم قدرت، گشتاور الکتریکی ماشین سنکرون به دو مؤلفه گشتاور سنکرون کننده و گشتاور میراکننده تقسیم می شود. پایداری ماشین سنکرون به وجود هر دو گشتاور بستگی دارد. کمبود گشتاور سنکرون کننده موجب رانش غير نوسانی و کمبود گشتاور میرا کننده موجب ناپایداری نوسانی می شود.
جهت بهبود پایداری گذرا و کنترل و تثبيت ولتاژ ژنراتور لازم است تا جریان تحریک بزرگی به ژنراتور تزریق گردد که این کار توسط کنترل کننده خودکار ولتاژ صورت می پذیرد. به منظور بهبود پایداری گذرای ماشین سنکرون، لازم است سیستم تحریک ژنراتور توانایی پاسخ سریع به اغتشاشات را داشته باشد. همچنین بالابودن گین کنترل کننده خودکار ولتاژ، باعث افزایش گشتاور سنکرون تزریقی توسط AVR می گردد. اما این گین بزرگ خود موجب تولید گشتاور میرا کننده منفی شده و ایجاد نوسانات فرکانس پایین ماندگار می کند. جهت حذف این نوسانات می توان گین AVR را کاهش داد که این روش به دلیل کاهش توانایی سیستم در مقابل اغتشاشات گذرا چندان مطلوب نیست و روش دیگر که بیشتر کاربرد دارد، استفاده از پایدار ساز سیستم قدرت در ترکیب با AVR است.
امروزه سیستم های قدرت به صورت یک شبکه پیچیده می باشند که می توانند شامل چند هزار شین و صدها واحد تولید توان باشند، که این سیستم ها از نظر اندازه و اجزای ساختاری با یکدیگر متفاوت هستند. با وجود این، مشخصه های اصلی مشابهی دارند.
- همگی در سیستم سه فاز جریان متناوب و در ولتاژ تقريبا ثابتی بهره برداری می شوند. در بخش های تولید و انتقال، از تجهیزات سه فاز استفاده می شود. بارهای صنعتی، همگی سه فاز هستند، حال آنکه بارهای خانگی و تجاری تک فاز، بین فازها به گونه ای توزیع می شوند که به طور موثر یک سیستم سه فاز تقریباً متعادل را تشکیل دهند.
- همگی از ژنراتورهای سنکرون جهت تولید برق استفاده می کنند. چرخاننده ها، منابع اولیه انرژی (فسیلی، هسته ای و آبی) را به انرژی مکانیکی تبدیل کرده و سپس این انرژی به کمک ژنراتورهای سنکرون به انرژی الکتریکی تبدیل می شود.
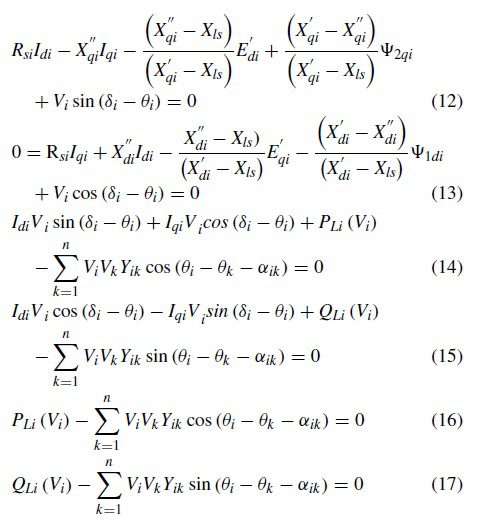
- همگی توان را از طریق خطوط انتقال طولانی به مصرف کننده هایی که در مناطق مختلف و دور پراکنده شده اند، انتقال می دهند. لازمه این موضوع، داشتن یک سیستم انتقال با زیرسیستم های متنوع می باشد که در سطوح ولتاژ متفاوت بهره برداری شوند. بخشهای اصلی یک سیستم قدرت به این صورت می باشند که توان الکتریکی تولیدی در نیروگاه ها (GS) را از طریق شبکه پیچیده ای، شامل اجزای گوناگون از جمله خطوط انتقال، ترانسفورماتورها و ابزار کلید زنی به مصرف کننده ها منتقل کنند.
معمولا شبکه انتقال را به زیر سیستم های زیر تقسیم می نمایند.
١. سیستم انتقال
۲. سیستم انتقال ثانویه (زیر انتقال)
٣. سیستم توزیع
سیستم انتقال، تمام نیروگاه های اصلی و مراکز عمده مصرف در سیستم را به یکدیگر متصل می کند. این سیستم، استخوان بندی سیستم مجتمع قدرت را تشکیل داده و در بالاترین سطوح ولتاژ (به طور نمونه ۲۳۰ کیلو ولت و بالاتر) مورد بهره برداری قرار می گیرد. ولتاژ ژنراتور ها معمولا در محدوده ۱۱ تا ۳۰ کیلو ولت می باشند. این ولتاژها ابتدا به سطح ولتاژ انتقال، تبدیل شده و به پست های انتقاله فرستاده می شود که در پست ها ولتاژ به سطح انتقال ثانویه (به طور نمونه ۹۹ تا ۱۳۸ کیلوولت) کاهش داده می شود. اغلب، قسمت تولید و زیر سیستم های انتقال به عنوان بخش عمده سیستم قدرت شناخته می شود. سیستم انتقال ثانویه توان را در حجمی کمتر از پست های انتقال به پست های توزیع انتقال می دهد. معمولاً مصرف کننده های عمده و بزرگ صنعتی مستقیما از طریق سیستم انتقال ثانویه تغذیه می شوند. در بعضی از سیستم ها، مرز مشخصی را بین بخش انتقال و بخش زیر انتقال نمی توان قائل شد.
سیستم توزیع آخرین مرحله در انتقال توان به مصرف کننده ها می باشد. ولتاژ اولیه توزیع عموما بین 4 تا
34.2 کیلوولت قرار دارد. مصرف کننده های صنعتی کوچک، به وسیله فیدرهای اولیه ای در این سطح ولتاژ، تغذیه می شوند. فیدرهای ثانویه توزیع، مصرف کننده های صنعتی و تجاری را در ولتاژ ۱۲۰ یا ۲4۰ ولت تغذیه می کنند. از این رو سیستم قدرت از منابع چندگانه تولید و چندین طبقه شبکه انتقال تشکیل شده است. این موضوع باعث می شود که از دید ساختاری امکاناتی ایجاد شود تا سیستم بتواند در برابر پیشامدهای غیر معمول، بدون قطع خدمات به مصرف کننده ها، مقاوم باشد.
با توسعة روزافزون شبکههای الکتریکی، بهره برداری بهینه از سیستم های قدرت و افزایش پایداری دینامیکی آنها یکی از مهمترین مسائل سال های اخیر می باشد. توانایی سیستم قدرت در حفظ پایداری، تا حد زیادی بر میراکردن نوسانات الكترومکانیکی به وسیله کنترلرهای موجود روی سیستم قدرت استوار است. نوسانات الكترومکانیکی پدیده ای ذاتی در سیستم های قدرت به هم پیوسته می باشد که با گسترش سیستم های قدرت و به خصوص با اتصال این سیستم ها با خطوط فشار ضعیف، شرایط بهره برداری مختلف و بروز اغتشاشات پایداری حالت ماندگار را محدود کرده، امنیت و عملکرد اقتصادی سیستم را تحت تاثير قرار میدهد. یک راه حل مناسب برای رفع این مشکل مجهزکردن ژنراتور به کنترل کننده پایدارساز سیستم قدرت می باشد. برای سال های متمادی PSS متداول ترین کنترل کننده برای میرایی نوسانات سیستم قدرت می باشد. پایدارساز سیستم قدرت یک سیگنال کنترلی تکمیلی تولید می کند تا نوسانات سیستم قدرت پس از یک اغتشاش سریعاً میرا شود. اگرچه مهمترین وسیله برای میرایی نوسانات می باشد، اما در برخی از نقاط کار توانایی لازم در میراییPSS نوسانات را ندارد. لذا استفاده از تجهیزات سیستم های انتقال جریان متناوب انعطاف پذیر یک راه کار مناسب برای این مساله است. کنترل کننده یکپارچه توان یکی از مناسبترین و تطبیق پذیرترین تجهیزات FACTS است که در سیستم های قدرت مورد استفاده قرار می گیرد.
تعریف پایداری و انواع آن در سیستم قدرت:
پایداری از مهمترین مشخصه ها و ملزومات در سیستم قدرت است. یک سیستم قدرت در حالت کلی پایدار است هرگاه بتواند تحت شرایط کاری نامی در یک حالت کاری متعادل باقی بماند و بعد از قرارگرفتن در معرض یک اغتشاش، حالت تعادل پذیرفته شده ای را بازیابد. پایداری در شبکه قدرت از نظر، شدت اغتشاش و مدت زمانی که در شبکه باقی می ماند به سه نوع زیر تقسیم بندی می شود:
- پایداری مانا
- پایداری دینامیکی
- پایداری گذرا.
پایداری مانا، توانایی سیستم به باقی ماندن در حالت سنکرونیزم در حضور اغتشاشات جزئی و کند از قبیل افزایش تدریجی و آرام بار مورد تقاضا است. تحقیقات پیرامون این مفهوم پایداری اغلب شامل آنالیز معادلات جبری می باشد که دینامیک سیستم قدرت را بیان می کنند. پایداری دینامیکی، اصطلاحی است که برای توصیف رفتار سیستم بين فواصل زمانی حالت گذرا و ماندگار سیستم استفاده می شود در پایداری دینامیکی سیستم در معرض اغتشاشات جزئی ولی ناگهانی قرار می گیرد و از معادلات دیفرانسیل خطی شده استفاده می شود. پایداری گذرا به صورت رفتار سیستم در طول تغییرات ناگهانی در شرایط بارگذاری از قبیل اتصال کوتاه، خروج ناگهانی واحد تولیدی یا اتصال ناگهانی بار اضافی توصیف می شود.
تحت این شرایط مدل خطی سیستم قدرت معمولا اعمال نمی شود و معادلات غیر خطی بایستی مستقیم برای تحلیل به کار گرفته شوند. در این بحث از پایداری سیستم قدرت، تأمین پایداری اولین نوسان و جلوگیری از لغزش ماشین (حفظ سنکرونیزاسیون با شبکه) در اولویت است. در بررسی پایداری دینامیکی سیستم های قدرت، فرض بر این است که دامنه اغتشاش کوچک است و سیستم خطی با دقت خوب می تواند رفتار سیستم را نشان دهد. به منظور تحلیل پایداری دینامیکی سیستم های قدرت، معادلات دیفرانسیلی دینامیک سیستم حول چند نقطه کاری پایدار خطی می شوند. اطلاعات پایداری سیستم را می توان از ماتریس حالت سیستم بدست آورد. معادله مشخصه و مقادیر ویژه بدست آمده از ماتریس حالت سیستم می تواند برای تعیین پایداری سیستم استفاده گردد. اگر مقادیر ویژه ی سیستم در سمت چپ محورهای مختلط جا بگیرد سیستم پایدار می گردد. مقادیر ویژه ی حقیقی به مودهای غیر نوسانی مربوط می شوند و مقادیر ویژه مختلط، ارائه دهنده ضرایب میراسازی و فرکانس هایی هستند که ممکن است در نوسانات متغیرهای سیستم مشاهده گردند. معمولا مدهایی با نسبت میرایی کمتر از 3% به عنوان مودهای بحرانی شناخته می شوند و لازم است این مدها تعدیل گردند. تحلیل پایداری سیگنال کوچک بر پایه خطی سازی محلی می تواند به عنوان ابزار تحلیل نسبتا ساده و قدرتمند برای مطالعهی رفتار دینامیکی سیستم باشد. با این وجود، این تحلیل به همسایگی نقطه کاری که خطی سازی حول آن معتبر است محدود میباشد.
از آنجا که شبکه های قدرت در مواجه دائمی با انواع گسترده ای از اختلالات هستند موارد مختلف ناپایداری شبکه در طراحی و بهره برداری بایستی مورد توجه واقع شوند. در طراحی تجهیزات انتقال نیرو و سیستم های کنترل واحدهای تولیدی بیان رفتار دینامیکی شبکه مورد نیاز است. در گذشته اکثر مطالعات دینامیکی شبکه های قدرت بر اساس مدل تک ماشین به شین بینهایت استوار بود و رضایت بخش نیز به نظر می رسیدند ولی با گسترش شبکه های بهم پیوسته و ارتباط بیشتر واحدهای تولیدی با یکدیگر مطالعات دینامیکی پیچیده تر گردید. با افزایش بهم پیوستگی سیستم های قدرت الکتریکی، این سیستم بزرگتر و بزگتر شده، ناحیه جغرافیایی بزرگی را پوشش داده و تعداد زیادی ماشین های الکتریکی را در بر می گیرد. شبکه های قدرت به دلیل به هم پیوستگی مناطق همجوار از طریق خطوط انتقال و همچنین گستردگی توزیع از رشد روز افزونی برخوردار می باشند. برای رسیدن به بازدهی و قابلیت اطمینان بیشتر و کنترل مناسب در این شبکه احتیاج به محاسبات پخش بار، مطالعات دینامیکی و بطور کلی آنالیز شبکه خواهیم داشت. چنین مطالعاتی برای شبکه های قدرت به دلیل حجم بالای محاسبات و پیچیدگی روابط دارای دو اشکال عمده می باشد:
-زمان زیاد محاسبات
-حجم بالای حافظه مورد نیاز
وجود این دو مسئله در مواردی مطالعات روی شبکه های پیچیده را غیرممکن می سازد. از اینرو همواره به دنبال روش هایی بوده اند تا بتوانند به یک معادل دینامیکی از سیستم برسند که ساده تر بوده و از معادلات کمتری برخوردار باشد به نحوی که رفتار این سیستم معادل بتواند با تلرانس خطای قابل قبولی رفتار سیستم اصلی را بیان کند.
سه روش اصلی برای معادل سازی دینامیکی سیستم ها وجود دارد. روش مودال که مقادیر ویژه اصلی سیستم خارجی را نگه می دارد روش Coherency که ماشین ها را به گروه های مختلفی تقسیم کرده و سپس ماشین های هر گروه را که نزدیک به هم نوسان می کنند با هم ترکیب و یک معادل برای آن ها در نظر می گیرد و روش تخمين که معادل سیستم خارجی را از طریق تخمین استخراج می کند و از مزیت های آن می توان به عدم نیاز به اطلاعات سیستم خارجی اشاره کرد.
پایدارساز سیستم قدرت(PSS):
یک سیستم قدرت شامل ژانراتورها، خطوط انتقال، بارها و ترانسفورماتورهاست. در مرحله طراحی سیستم، پس از محاسبه ظرفیت انتقال، تولید اقتصادی توان و غیره، پایداری سیستم در پی مجموعه ای از اغتشاش ها بررسی می گردد. بنابر تعریف کلی پایداری در سیستم ها، تمام سیستم های قدرت ناپایدارند زیرا با یک اغتشاش با دامنه محدود و عمل نکردن رله ها از حالت سنکرون خارج می شوند. طبق تعریف یک سیستم قدرت وقتی ناپایدار خوانده می شود که سیستم های کنترلی از عهده اغتشاش برنیایند و برای حفظ سلامت سیستم سیستم های حفاظتی وارد عمل شوند. پایداری در سیستم های قدرت سه دسته است : پایداری مانا، پایداری دینامیکی و پایداری گذرا. منظور از پایداری مانا توانایی سیستم در حفظ پایداری اش پس از یک اغتشاش بسیار کوچک است. منظور از پایداری دینامیکی توانایی سیستم در حفظ شرایط جدید پس از نوسانات ایجاد شده با یک اغتشاش کم دامنه و منظور از پایداری گذرا توانایی سیستم در حفظ شرایط جدید پس از نوسانات ایجاد شده با یک اغتشاش پردامنه است. مرز بین بین اغتشاش بسیار کوچک ، کم دامنه و پر دامنه کاملا تعریف شده نیست ولی به طور نسبی آن را تعریف می کنند. در بررسی پایداری مانا و دینامیکی، به دلیل این که دامنه اغتشاش کوچک است ، از مدل خطی استفاده می شود. بررسی پایداری این مدل کاملا شبیه هر سیستم خطی دیگر است. یک سیستم خطی در فضای حالت در صورتی پایدار است که تمام مقادیر ویژه سیستم قسمت حقیقی منفی داشته باشد. پس بحث پایداری دینامیکی در سیستم های قدرت بحث پیچیده ای نیست. چنانچه در یکی از ظروف چند ظرف مرتبط مقدار قابل توجهی آب ریخته شود ( به سیستم اغتشاش وارد شود) ، تمام سطوح آب در تمام ظروف مغشوش و دارای نوسان می شوند تا پس از مدتی در یک سطح جدید آرام بگیرند. همچنین اگر روی یکی از از این جرم هایی که با فنر به هم متصلند وزنه ای گذاشته شود ، تمام جرم ها نوسان می کنند و پس از مدتی در یک حالت جدید آرام می گیرند.سیستم های قدرت نیز چنین هستند. اگر به یک سیستم قدرت چند ماشينه اغتشاش وارد شود، فرکانس، زاویه بار و ولتاژ تمام واحدها دستخوش نوساناتی می شود.
در بررسی این گونه نوسانات در درجه ی اول باید دانست که آیا این نوسانات میرا می شوند یا خیر؟ به عبارت دیگر آیا سیستم پایدار است یا خیر؟ چنانچه سیستم پایدار باشد، این نوسانات معمولا در عرض چند ثانیه از بین می روند و سیستم در شرایطی جدید آرام می گیرد. این نوسانات در سیستم های قدرت به نوسانات فرکانس پایین معروف شده اند. فرکانس این نوسانات معمولا بین چند دهم هرتز تا چندین هرتز است. این نوسانات را گاهی به دو نوع محلی و بین ناحیه ای تقسیم می کنند . نوسانات محلی ، نوسانات فرکانس پایین یک واحد نیروگاهی و یا واحدهای یک نیروگاه ( عموما با یک خط ضعیف به شبکه متصل هستند ) نسبت به شبکه و نوسانات بین ناحیه ای نوسانات واحد های یک ناحیه نسبت به واحدهای یک ناحیه دیگر است. در بررسی پدیده نوسانات فرکانس پایین عموما فرض بر این است که دامنه اغتشاش کوچک است و در نتیجه ، مدل خطی برای بررسی این پدیده کفایت می کند. هر چند که مطالعه بر روی مدل غیر خطی نیز به همان نتایج می انجامد.
بهبود پایداری سیستم قدرت یکی از اهداف، وظایف و آرزوهای اصلی مهندسین قدرت بوده و نیز امروزه به دلیل گسترش اندازه و تنوع سیستم های قدرت از اهمیت بیشتری برخوردار شده است. تحقیقات زیادی برای بهبود مسئله پایداری سیستم های قدرت با به کار گیری پایدار کننده هایی روی ژنراتورها صورت گرفته است. به منظور تامین انرژی مطمئن برای مصرف کنندگان سیستم های قدرت باید در مقابل انواع اغتشاشات پایداری خود را حفظ کنند. یک سیستم در صورتی پایدار است که واحدهای بهم پیوسته تولید در حالت سنکرونیزه باقی بماند. اگر به هر دلیلی یک واحد تولیدی و یا مجموعه ای از این واحدها از حالت سنکرونیزه خارج شوند آن قسمت از سیستم دچار ناپایداری می شود. از این رو بررسی پایداری سیستم های قدرت از اهمیت خاصی برخوردار بوده و همواره یکی از مهمترین بحث های قدرت است که دربرگیرنده مطالعه رفتار این سیستم ها در حضور انواع اغتشاشات و طراحی انواع کنترلرها جهت میرا کردن نوسانات الكترومکانیکی حاصله در راستای حفظ پایداری است. مطالعات پایداری سیستم قدرت، مطالعه رفتار این سیستم ها در موقعیت هایی از قبیل تغییر ناگهانی در بار یا تولید، رخ دادن خطا در خطوط انتقال از شبکه را شامل می شود. به منظور داشتن کیفیت توان الکتریکی عرضه در سیستم قدرت ، می بایست عوامل زیر دارای استاندارد لازم باشند:
الف) تثبیت فرکانس
ب) تثبیت ولتاژ
ج) سطح قابلیت اطمینان
حلقه های مختلفی در سیستم های قدرت وجود دارد تا سه عامل فوق در محدوده های مجاز نگهداری شوند. یکی از اجزای مهم در سیستم های قدرت، واحد تولید ( نیروگاه ها و ژنراتورها) می باشد. از مهمترین کنترل کننده ها می توان به کنترل کننده محرک مکانیکی و کنترل کننده سیستم تحریک نیروگاه اشاره کرد. این دو کنترل کننده به ترتیب کنترل فرکانس و کنترل ولتاژ را در سیستم های قدرت انجام می دهند. حلقه مربوط به کنترل فرکانس با کنترل توان مکانیکی ، توان حقیقی را در سیستم قدرت کنترل می کند و حلقه مربوط به کنترل ولتاژ با تغییر و کنترل جریان تحریک، کنترل و تامین توان راکتیو را در شبکه بر عهده دارد. اما قابل توجه است که این دو حلقه کنترلی برای از بین بردن نوسانات حالت گذرا توانایی محدودی دارند. به همین دلیل به یک حلقه کنترل کننده دیگر جهت کمک به این دو حلقه فكر شد. بعضی یک سیستم کنترلی چند متغیره که تداخل ها را نیز منظور و از های پیشرفته کنترلی استفاده می کند را برای جایگزینی این دو حلقه پیشنهاد کردند ولی به دلیل استفاده دیرینه از این دو حلقه کنترلی در نیروگاه ها و امتحان شدن و قابل اعتماد بودنشان از این ایده استقبالی نشد. لذا کنترل کننده تکمیلی پیشنهاد شد. در این حالت سیستم توربوژنراتور همراه با حلقه های کنترلی فرکانس و ولتاژ، با هم به صورت یک سیستم تحت کنترل تعریف و سپس یک حلقه کنترلی اضافی روی آن سوار می شود. این حلقه کنترلی اضافی را اصطلاحا پایدارساز سیستم قدرت ( PSS ) نامیده اند. برای طراحی PSS پیشنهادهای بسیار متنوع و متفاوتی ارائه شده و این موضوع قدرتی کنترلی برای بسیاری از محققین جالب توجه بوده و مقالات بسیار متنوعی در این باره منتشر شده است و هنوز نیز در مجلات و کنفرانس های معتبر بین المللی روش های جدیدی پیشنهاد می شود. به طراحی PSS هم مهندسین قدرت و هم کنترل توجه کرده اند.
هرگاه سیستم قدرت بتواند پس از بروز اختلال، به حالت دائمی باز گردد پایدار گفته می شود. به عبارت ساده تر حفظ سنکرونیزم یا همزمانی پس از اختلال را پایداری گویند. بر حسب عوامل مختلف ایجاد ناپایداری تعاریف گوناگونی از پایداری سیستم قدرت ارائه شده است. از جمله آنها می توان به پایداری مانا، پایداری دینامیکی و پایداری گذرا اشاره کرد.
١- پایداری مانا: عبارتست از پایداری سیستم قدرت در مقابل تغییرات کوچک و تدریجی بار.
۲- پایداری دینامیکی: هرگاه پایداری سیستم قدرت در مقابل اغتشاش های کوچک و ناگهانی به خطر نیفتد سیستم را به طور دینامیکی پایداری گویند.
٣- پایداری گذرا: به پایداری سیستم قدرت در برابر تغییرات بزرگ و ناگهانی (تریپ ژنراتورها، قطع یا اتصال کوتاه در خطوط) گفته می شود. برای مطالعه هر یک از اقسام پایداری بایستی مدل مناسبی از سیستم را بدست آورد. در مدلسازی بایستی پدیده های با اهمیت و مرتبط با پایداری مورد مطالعه، در مدل منعکس شده و از در نظرگرفتن پدیده های کم اهمیت در آن صرف نظر گردد. بدین جهت مدل مناسبی از سیستم قدرت برای بررسی یک پایداری خاص، ممكن است برای نوع دیگری از پایداری غیر مناسب باشد. به عنوان مثال در بحث پایداری دینامیکی می توان رفتار سیستم را با مدلی خطی توصیف کرد، حال آنکه این مدل جهت مطالعه پایداری گذرا فاقد اعتبار است.
نوسانات با فرکانس کم در سیستم های قدرت توسعه شبکه های قدرت نوساناتی خود بخودی با فرکانس کم را، در سیستم به همراه داشته است. بروز اغتشاش هایی نسبتا کوچک و ناگهانی در شبکه باعث به وجود آمدن نوساناتی طبیعی در سیستم می شود. در حالت عادی این نوسانات بسرعت میرا شده و دامنه نوسانات از مقدار معینی فراتر نمی رود. این نوسانات برای مدت طولانی ادامه یافته و در بدترین حالت دامنه آنها نیز افزایش یابد. وجود چنین نوساناتی در شبکه خطرات جدی را به همراه داشته بهره برداری از سیستم را مشکل می سازد. تجربیات مختلف از سیستم های قدرت به هم پیوسته نشان داده است که این نوسانات در اثر تحریک مودهای الکترومکانیکی ژنراتورهای سنکرون بوجود می آیند. امروزه جهت بهبود این پایداری از پایدار کننده های سیستم قدرت استفاده می شود.
رشد تقاضای بار و افزایش قیمت سوخت های فسیلی و گرمایش زمین، توجه به بازیافت انرژی و شبکه های کوچک تولید انرژی را بیشتر کرده است. اتصال سیستم های قدرت به یکدیگر بروز برخی مدهای نوسانی الکترومکانیکی و فرکانس های نوسانی در محدوده 0.2-2 هرتز را مطرح می نماید. زمانی که برخی نوسانات الکترومکانیکی در سیستم قدرت باقی بماند، استفاده کامل از سیستم قدرت محدودشده و امکان ناپایداری دینامیکی و عدم هماهنگی در تأمین بار به وجود می آید. از سوی دیگر، این نوسانات تأثیر منفی در فرسودگی شفت توربین ژنراتور داشته و به تدریج صدمه بسیاری بر آن وارد می کند. زمانی که سیستم های قدرت بزرگ به خطوط ضعيف مجاور متصل می گردند، نوسانات فرکانس کوچک ظاهر می شود. این نوسانات در صورتی که میراسازی کافی وجود نداشته باشد، ممکن است تقویت شده و افزایش یابند که منجر به انفصال سیستم شوند. نوسانات سیستم قدرت ناشی از تغییرات بار، نفوذ انرژی های تجدیدپذیر و اختلالات خارجی می توانند منجر به نوسانات زیر سنکرون و فرکانس کوچک یک سیستم قدرت شوند. وضعیتی که می تواند بیشتر منجر به فروپاشی ولتاژ، حالت جزیره ای و خاموشی شود. نوسانات فرکانس کوچک، نوسانات زاویه روتور هستند که ناشی از تحریک مدهای نوسانی الکترومکانیکی محلی یا مدهای نوسانی بین ناحیه ای می باشند. پایداری اغتشاشات کوچک، به ویژه در میراسازی مدهای الکترومکانیکی یا نوسانات بین ژنراتورهای سنکرون نصب شده در سیستم قدرت، یکی از معیارهای ضروری را برای عملکرد سیستم ایمن تشکل می دهد. در دهه های اخیر توسعه سریع توان و ولتاژ نیمه هادیها، کنترل، انعطاف و عملکرد سیستم های قدرت را بهبود بخشیده است که می توانند جهت طراحی جبران سازهای مناسب برای سیستم های قدرت استفاده گردند. این جبران سازها با نام ادوات FACTS شناخته می شوند. کنترل کننده های FACTS می توانند خاصیت خازنی شبکه را سریع کنترل کنند و این ویژگی می تواند جهت بهبود پایداری سیستم قدرت مورد استفاده قرار گیرد. خصوصیت شاخص کنترل کننده های FACTS شامل کنترل توان اکتیو و راکتیو، کنترل ولتاژ، میرایی نوسانات، پایداری گذرا و دینامیکی، بهبود پایداری ولتاژ و محدود کردن جریان خط می باشد. در خطوط انتقال توان الکتریکی خازن های سری، پایداری را بهبود داده و ظرفیت انتقال توان را افزایش می دهند. به هر حال این موضوع می تواند باعث تشدید زیر سنکرون شود. در سالهای اخیر با توسعه ادوات الکترونیک قدرت، کنترل کننده های FACTS به طور وسیع در سیستم قدرت استفاده می گردند.
PSS یک تجهيز الکترونیکی است که می تواند پایداری سیستم قدرت را بهبود بخشد. درواقع یک سیستم کنترل تکمیلی است که اغلب به عنوان بخشی از سیستم کنترل تحریک مورد استفادهPSS قرار می گیرد. ویژگی اصلی PSS، اعمال یک سیگنال به سیستم تحریک به منظور افزایش گشتاور الکتریکی است. این گشتاور درحالی که سرعت تغییر می یابد به روتور اعمال شده و نوسانات توان خارجی را متوقف می کند. به هر حال استفاده از PSS ها به تنهایی ممکن است در برخی موارد کارایی کافی نداشته باشد و موارد کار آمد دیگری علاوه بر آن مورد نیاز باشد. ادوات FACTS قادر به کنترل شرایط و عملکرد شبکه در یک زمان بسیار کوتاه بوده و می توانند برای پایداری سیستم قدرت مورد استفاده قرار گیرند.
تحلیل پایداری سیستم قدرت و کنترل، یک موضوع مهم و به روز در مطالعات سیستم قدرت می باشد. دو نوع استراتژی کنترلی جهت بهبود پایداری در سیستم قدرت وجود دارد که یکی تولید میرایی در مسیر انتقال با استفاده از ادوات FACTS و دیگری در کنار ژنراتور با استفاده از PSS می باشد. ادوات FACTS و PSS تجهیزات با عملکرد سریع در سیستم قدرت بوده و دارای قابلیت واکنش با یکدیگر و بدتر شدن عملکرد مورد انتظار هستند. به دلیل شرایط مذکور دو جنبه اصلی باید در استفاده از ادوات FACTS در نظرگرفته شود: عملکرد سیستم قدرت انعطاف پذیر با توجه به قابلیت کنترل توان ادوات FACTS و دیگری بهبود پایداری گذرا و دینامیکی سیستم قدرت. عملکرد PSS ها معمولا اولین روش جهت افزایش پایداری سیگنال کوچک سیستم می باشد. در برخی موارد زمانی که استفاده از PSS ها میرایی کافی در برابر نوسانات توان بین ناحیه ای فراهم نکند، کنترل کننده SSSC یک راه حل مؤثر خواهد بود. عملکرد اولیه SSSC در سیستم قدرت نگه داشتن ولتاژ باسبار و تولید توان راکتیو است. با استفاده از این کنترل کننده میراساز، SSSC می تواند میرایی فوق العاده ای را فراهم کند. روش های مرسوم تحلیل سیستم های دینامیکی از لحاظ مفهومی ساده بوده و تنها مستلزم تعداد معقولی محاسبات می باشند، اما تنها در مورد سیستم های خطی تغییر ناپذیر بازمان، تک ورودی و تک خروجی (متکی بر مفهوم تابع تبديل) قابل اعمال می باشند. امروزه در سیستم های کنترل مدرن ممکن است با سیستم هایی که دارای چندین ورودی و چندین خروجی هستند روبرو باشیم که این ورودی و خروجی ها نیز ممکن است به طریقی پیچیده ای به هم مربوط باشند.
پایداری سیستم قدرت را به طور کلی می توان آن ویژگی از سیستم قدرت دانست که آن را قادر می سازد تا تحت وضع عادی، در حالت تعادل باقی بماند و در صورتی که تحت تأثير اغتشاشی قرار گیرد، مجددا حالت قابل قبول متفاوتی را به دست آورد. ناپایداری در یک سیستم قدرت ممکن است بستگی به ترکیب سیستم داشته و حالت کاری آن به شکل های مختلفی بروز کند. معمول بوده است که مسئله پایداری را به عنوان مسئله حفظ عملکرد سنکرون ژنراتورها بشناسند. از آنجا که تولید در سیستم قدرت بر پایه ماشین های سنکرون (ژنراتورها) استوار است، شرط لازم برای عملکرد قابل قبول سیستم این است که همه ماشین های مزبور با یکدیگر در حالت سنکرون با هماهنگ باقی بمانند. این جنبه پایداری تحت تأثیر دینامیک روابط زاویه روتور، توان حقیقی و زاویه ژنراتور قرار دارد.
همچنین ممکن است بدون آن که سنکرون از دست برود، ناپایدار شود. به عنوان مثال ممکن است سیستمی شامل یک ماشین سنکرون که از طریق یک خط انتقال، یک موتور القایی را تغذیه می کند، در اثر فروپاشی ۲ ولتاژ بار، ناپایدار شود. حفظ عملکرد سنکرون در این حالت مطرح نیست بلکه مسئله، پایداری و حفظ ولتاژ است. این نوع ناپایداری می تواند در مورد بارهایی که در یک محدوده وسیع قرار دارند و از یک سیستم بزرگ تغذیه می شوند نیز اتفاق افتد. در ارزیابی پایداری، مسئله مهم رفتار سیستم در زمانی است که تحت تأثیر یک اغتشاش گذرا قرار گیرد. اغتشاش ممکن است کوچک یا بزرگ باشد. اغتشاش های کوچک به شکل تغییرات بار دائما اتفاق می افتند و سیستم خود را با وضعیت متغير حاصل، تنظیم می کنند. سیستم باید قادر باشد تحت این حالت، عملکرد قابل قبولی داشته باشد و حداکثر مقدار بار را تأمین نماید و نیز باید بتواند در مقابل اغتشاش های سخت از قبیل اتصال کوتاه یک خطوط انتقال، از دست دادن یک ژنراتور یا بار بزرگ و یا از دست دادن خط ارتباطی بین دو زیرسیستم، مقاوم باقی بماند. عملکرد سیستم در مقابل اغتشاش عمدتا ناشی از نحوه عملکرد تجهیزات تشکیل دهنده آن است. به عنوان مثال، اتصال کوتاهی که بر یک جزء حساس واقع می شود و آن جزء به وسیله رله های محافظ از سیستم جدا می گردد، باعث می شود که تغییراتی را در توان های انتقالی خطوط ارتباطی، سرعتهای روتور ژنراتورها و ولتاژ شینه ها داشته باشیم.
تغییرات ولتاژ خود باعث عملکرد تنظیم کنندهای ولتاژ ژنراتورها و سیستم انتقال می شود، حال آن که تغییرات سرعت روتور ژنراتورها، گاورنر محرکها (توربین ها) را به عکس العمل وا می دارد. تغییرات در توانهای انتقالی خطوط ارتباطی ممکن است سیستم های کنترل تولید را به کار اندازد. تغییرات ولتاژ و فرکانس باعث می شود که بسته به مشخصات آنها، بارهای سیستم به درجه های متفاوتی تغییر نماید. به علاوه، سیستم های محافظ اجزاء ممکن است نسبت به تغییرات در متغیرهای سیستم، عکس العمل نشان دهد و به این گونه بر عملکرد سیستم تاثیر بگذارد. با این وجود، در هر وضع به خصوص، عکس العمل تعداد محدودی از تجهیزات ممکن است قابل توجه باشد. از این رو معمولا فرضیات زیادی انجام می پذیرد تا مسئله، ساده شود و بتوان کار را بر روی عواملی که به خصوص بر روی مسئله پایداری تأثیر می گذارند، متمرکز کرد. درک مسائل پایداری را می توان تا حد زیادی با طبقه بندی آن به انواع مختلف تسهیل کرد.
پایداری زاویه ای روتور توانایی ماشین های به هم پیوسته سنکرون یک سیستم قدرت است که با یکدیگر در حالت سنکرون باقی می مانند. مسئله پایداری در این حالت شامل مطالعه نوسان های الکترومکانیکی است که به طور ذاتی در سیستم های قدرت وجود دارد. عامل مهم در این مسئله، نحوه رفتار توان های خروجی ماشین های سنکرون در مقابل نوسان های روتور آنهاست.
مشخصه های ماشین های سنکرون:
یک ماشین سنکرون دو جزء اساسی شامل تحریک و آرمیچر دارد. معمولا، تحریک روی روتور و آرمیچر روی استاتور واقع است. سیم پیچ تحریک با استفاده از جریان مستقیم تغذیه می شود. زمانی که روتور را با یک محرک (توربین) بچرخانیم، میدان مغناطیسی دوار سیم پیچ تحریک، ولتاژهای متناوبی در سه فاز سیم پیچ های آرمیچر استاتور، القاء می نماید. فرکانس ولتاژ متناوب القاء شده و جریان های حاصل در سیم پیچ های استاتور (زمانی که بار به آنها متصل است) بستگی به سرعت روتور دارد. از این رو مشاهده می شود که فرکانس متغیرهای الکتریکی استاتور با سرعت مکانیکی روتور، سنکرون با هماهنگ شده اند. از این روست که واژه ماشین سنکرون به کار می رود. زمانی که دو یا چند ماشین سنکرون به یکدیگر متصل می شوند، باید ولتاژ و جریان استاتور همه ماشین ها دارای یک فرکانس باشند و سرعت مکانیکی هر یک با این فرکانس هماهنگ باشد. از این رو تمام ماشین های سنکرون به هم پیوسته، باید باهم سنکرونیزه باشند.
شرح پروژه:
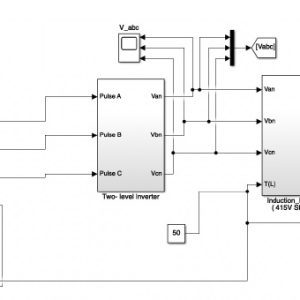
پروژه متلب تحلیل دینامیکی پایداری سیستم های قدرت با استفاده از پایدارساز سیستم قدرت(PSS) برای سیستم چندماشینه در شبکه 9 شینه و 68 شینه IEEE ، انجام شده است. شبیه سازی سیستم های قدرت چندماشینه با درنظرگرفتن حل های صریح و ضمنی برای اغتشاشات سمت ژنراتور و شبکه انجام شده است.
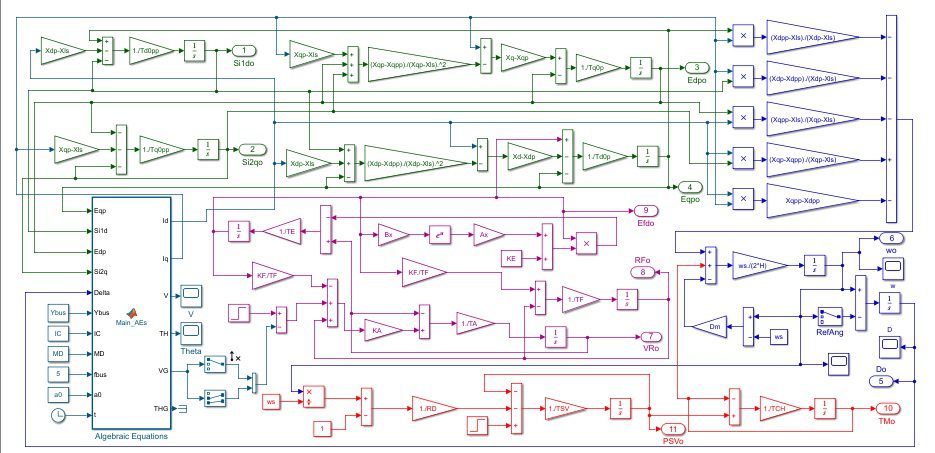
رفتار دینامیکی یک سیستم قدرت را می توان با استفاده از شبیه سازی دامنه زمانی، تحلیل مودال، و تحلیل پاسخ فرکانسی مورد مطالعه قرار داد. به لحاظ ریاضی، یک سیستم قدرت چندماشینه را می توان در دامنه زمانی با استفاده از مجموعه ای از معادلات جبری دیفرانسیلی(DAE) مدلسازی نمود. این معادلات را میتوان به صورت روش ضمنی یا صریح حل نمود. در روش ضمنی معادلات دیفرانسیلی به معادلات جبری با یک روش عددی مانند روش اویلر یا ذوزنقه ای تبدیل می شوند. مجموعه جدید معادلات، معادلات جبری محض هستند که می توانند به صورت همزمان با یک تکنیک عددی حل شوند. در روش صریح، معادلات دیفرانسیلی برای متغیرهای حالت به صورت مستقل با استفاده از روش انتگرال گیری عددی حل می شوند درحالیکه معادلات جبری برای متغیرهای جبری در فضای جداگانه حل می شوند. نوع دیگر تحلیل سیستم، تحلیل مودال و تحلیل پاسخ فرکانسی است که در مطالعه سیگنال کوچک استفاده می شوند. برای این تکنیکها معادلات غیرخطی بیان کننده سیستم قدرت بایستی حول یک نقطه عملیاتی خطی شوند و سیستم می تواند در فضای حالت قرار داده شود.
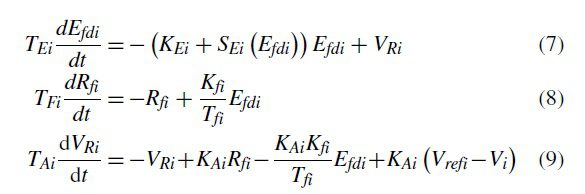
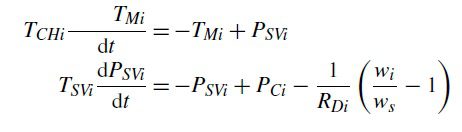
معادلات جبری دیفرانسیلی(DAE) برای سیستم قدرت چندماشینه با m ماشین و n باس را می توان به صورت زیر بیان کرد:
معادلات دیفرانسیلی:
معادلات ژنراتور سنکرون:
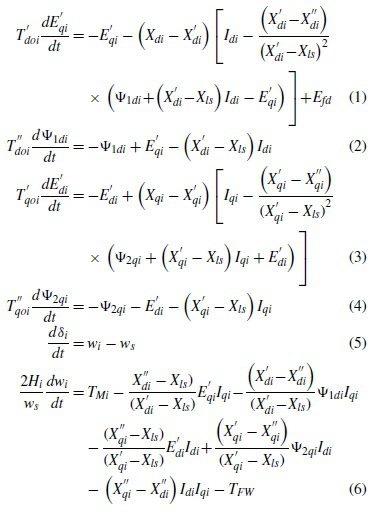
معادلات سیستم تحریک:
سیستم توربین:
معادلات جبری(استاتور و جریان توان):
معادلات جبری شامل معادلات استاتور و جریان توان شبکه است. معادلات استاتور به صورت مستقیم از مدار معادل دینامیکی شکل زیر بدست می آیند.
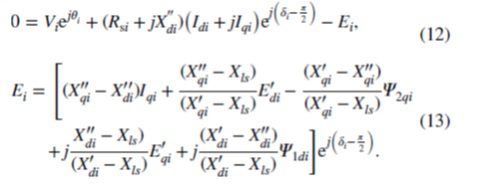
معادلات(15-17) معادلات جبری جریان توان شبکه برای باس های ژنراتور و باس بار هستند.
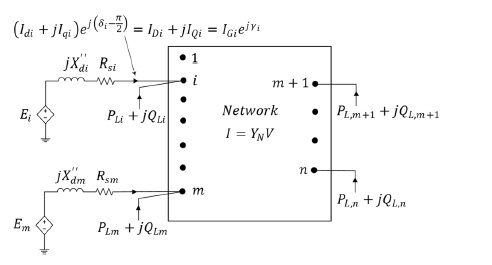
شکل مدار دینامیکی سیستم چندماشینه.
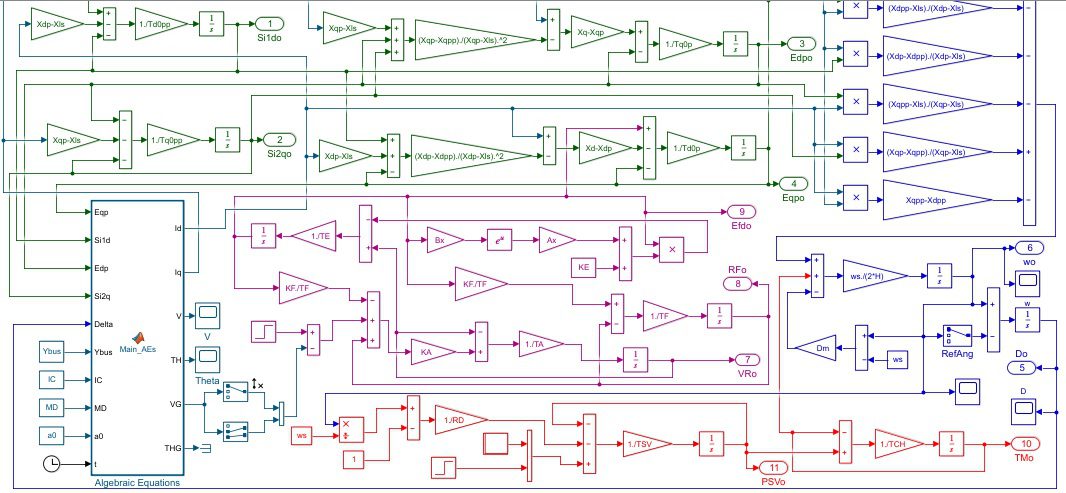
مدل پایدارساز سیستم قدرت(PSS):
پایدارساز سیستم قدرت(PSS) متشکل از سه جزء اصلی است:
(1)جبرانساز پیش فاز،![]()
که در آن T1 و T2 ثابت های زمانی جبرانساز هستند و nb تعداد بلوک های جبرانسازی است که می تواند مقدار 1 ، 2و یا بیشتر باشد.
(2) فیلتر بالاگذر شوینده،![]()
که در آن Tw ثابت زمانی شوینده (washout) است.
(3) و بهره پایدارساز (Kpss) می باشد.
درصورتیکه T1 بیشتر ازT2 باشد، جبرانساز پیش فاز (Phase-lead) نامیده می شود درحالیکه اگر T1 کوچکتر از T2 باشد، جبرانساز پس فاز(Phase-lag) نامیده می شود.
معمولاً محدوده T1 و T2 بین 0.1 -1 ثانیه و 0.01-0.1 ثانیه است.
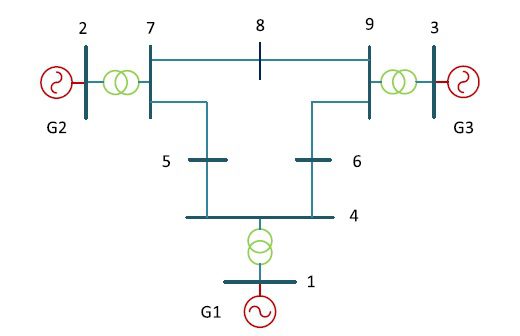
شبکه 9 شینه و 68 شینه IEEE:
نمایش شبکه 9 شینه 3 ماشینه در شکل زیر آورده شده است.
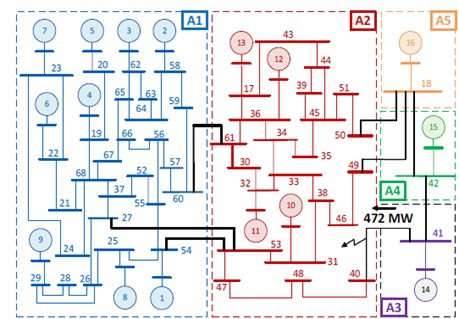
شبکه 68 شینه:
شبکه 68 شینه شامل 16 ماشین است.
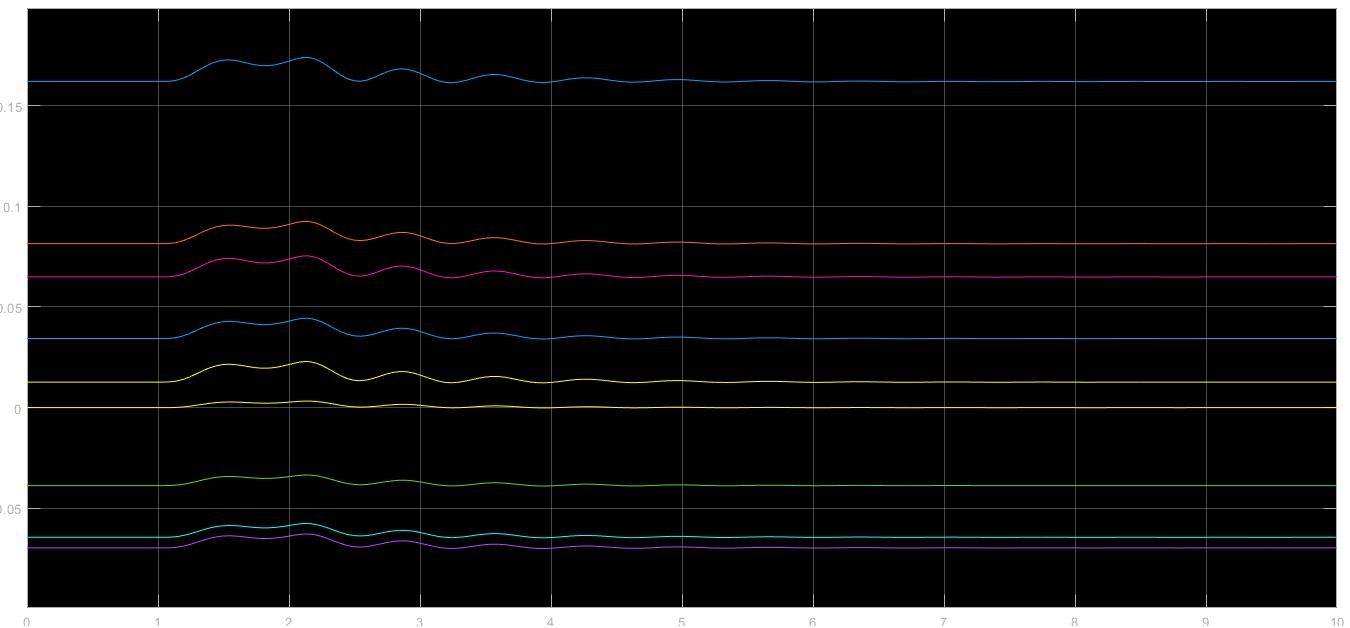
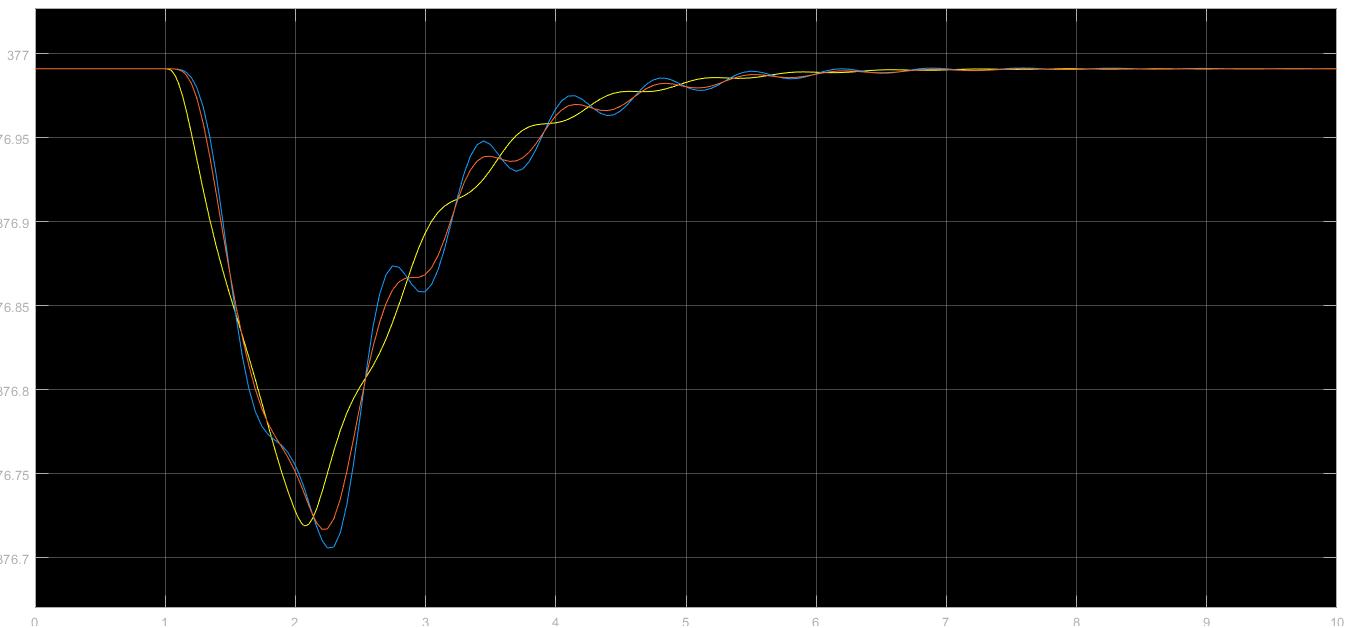
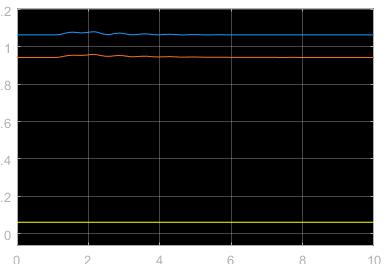
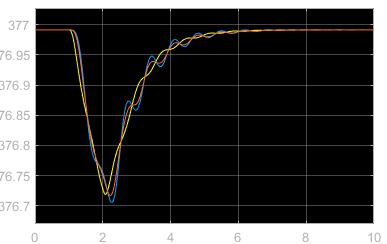
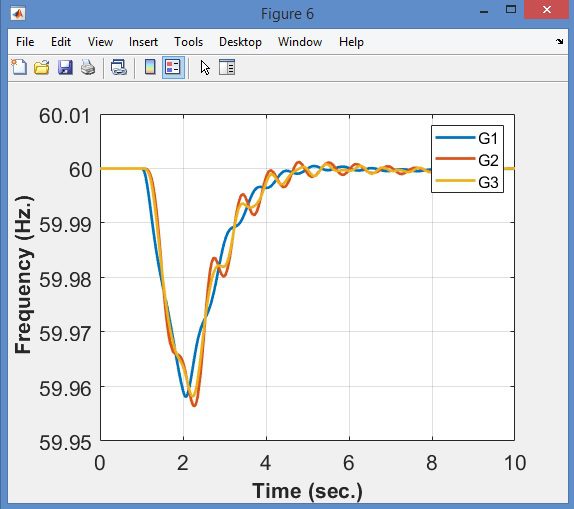
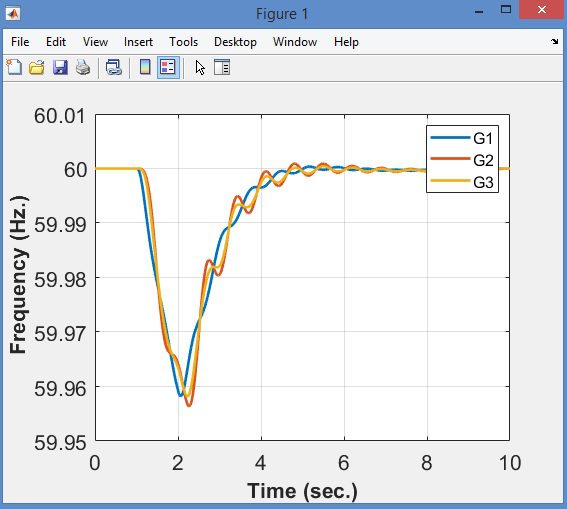
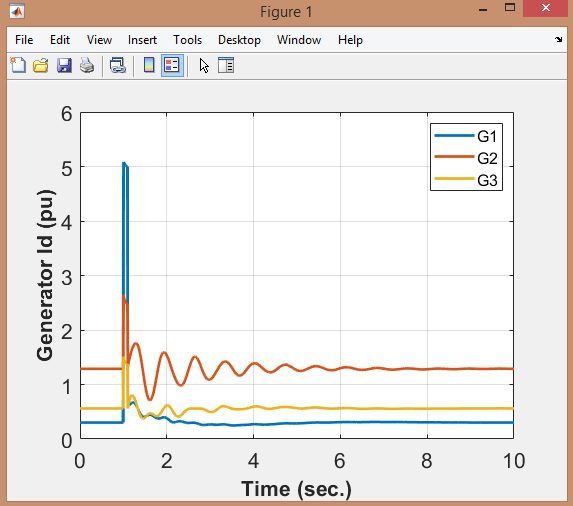
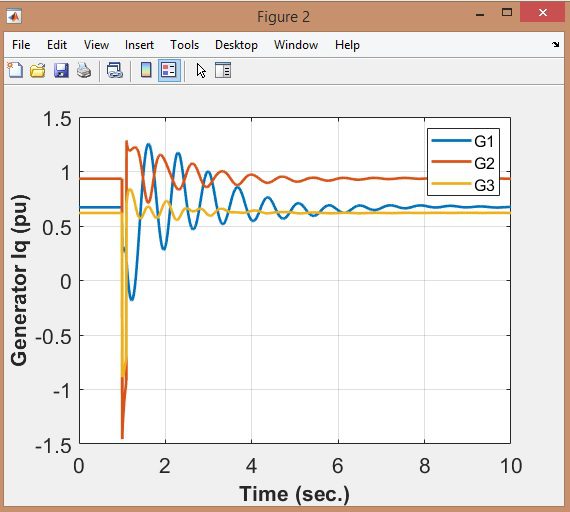
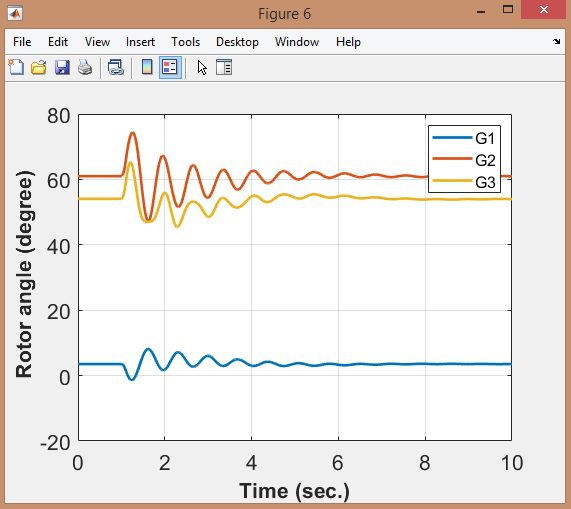
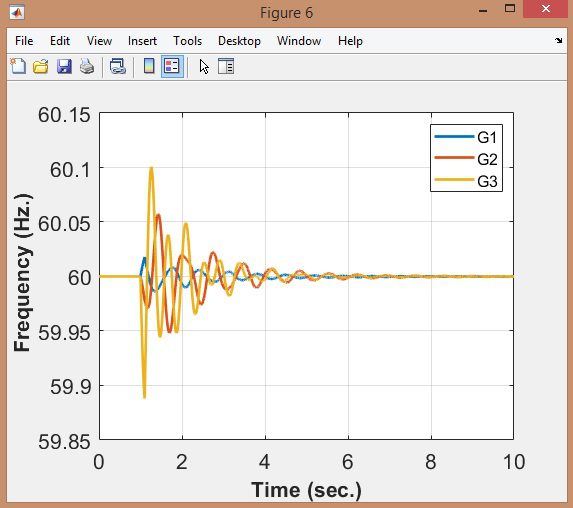
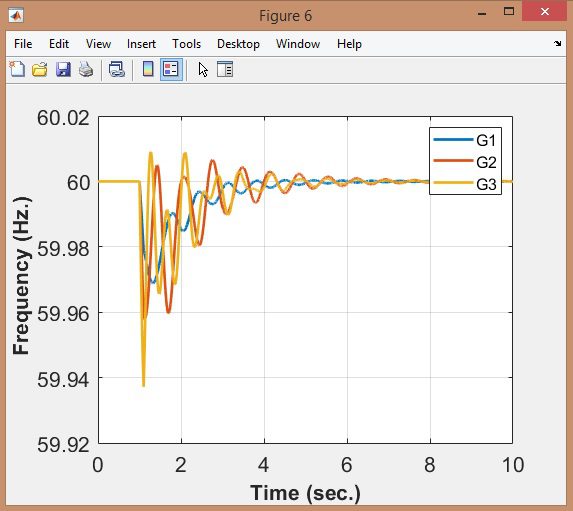
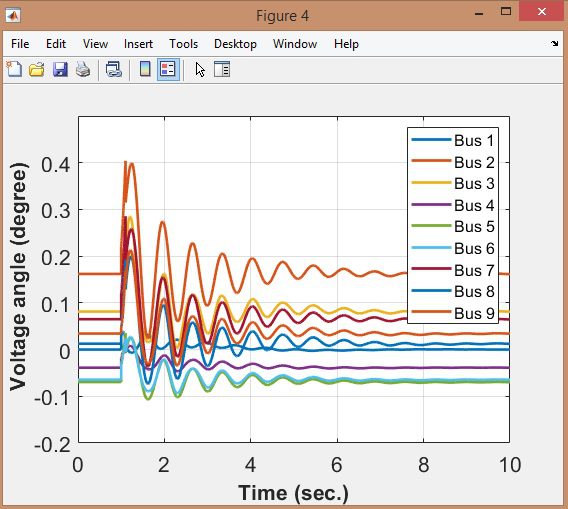
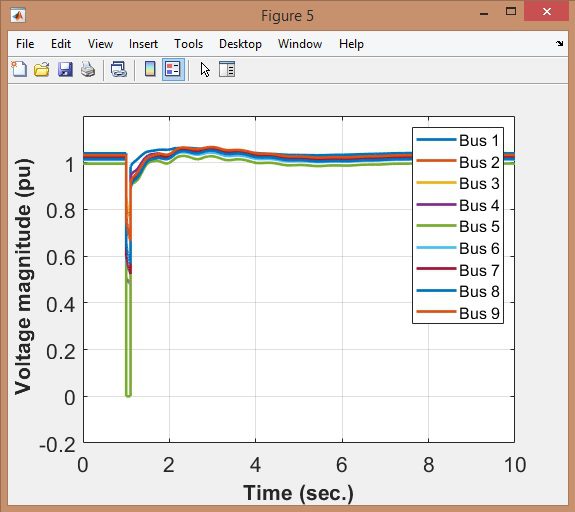
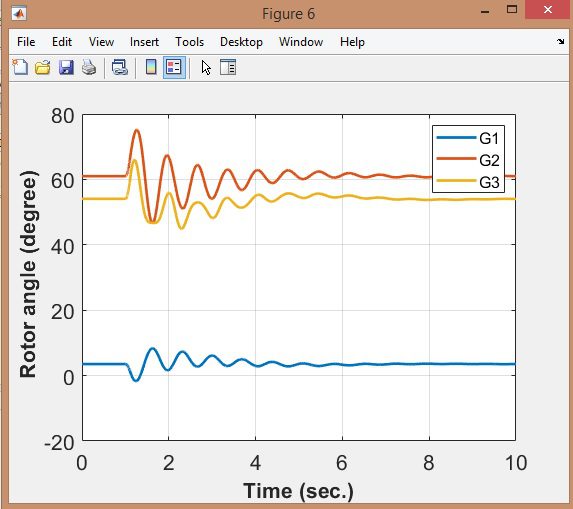
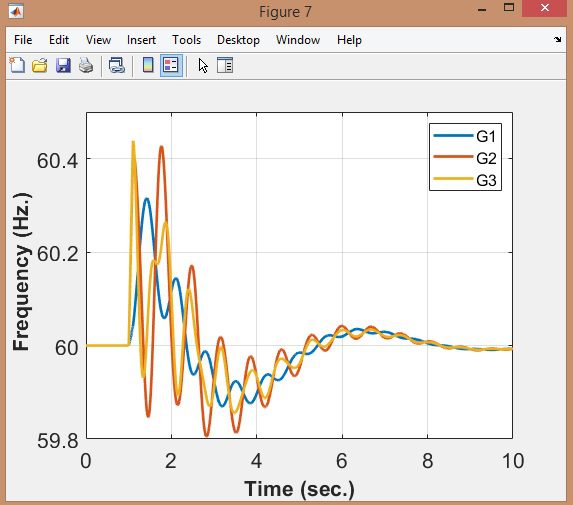
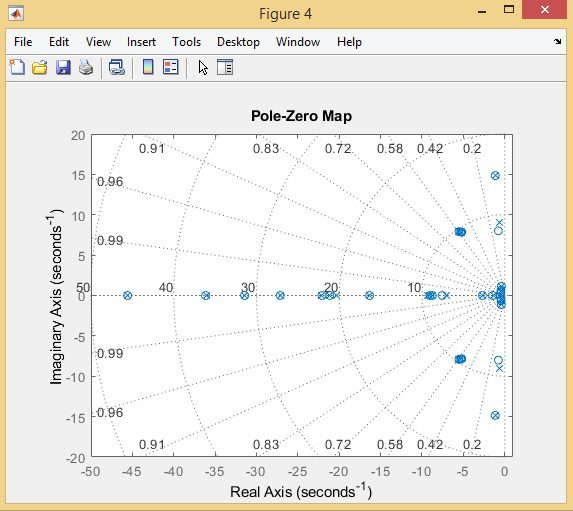
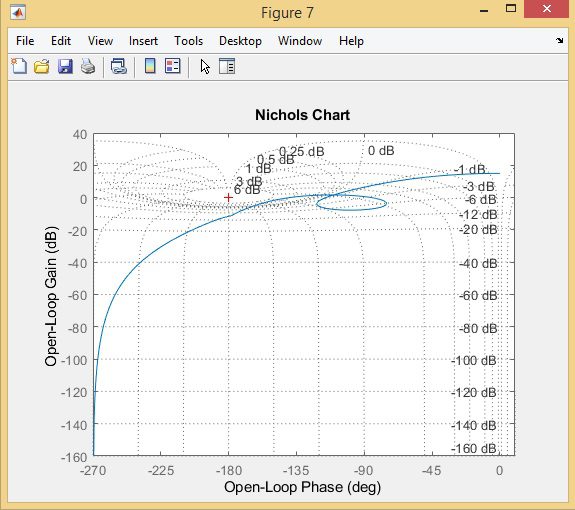
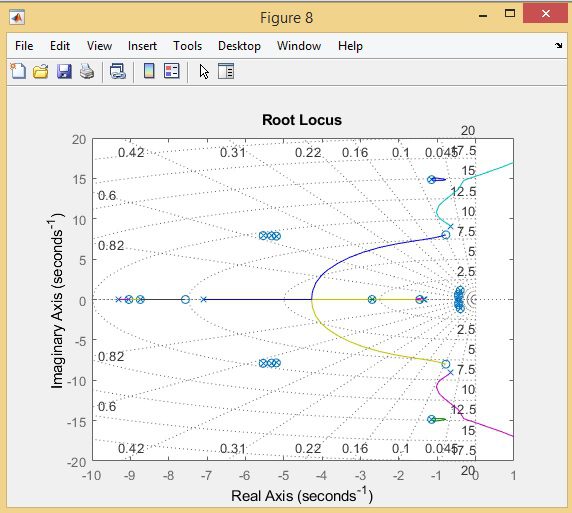
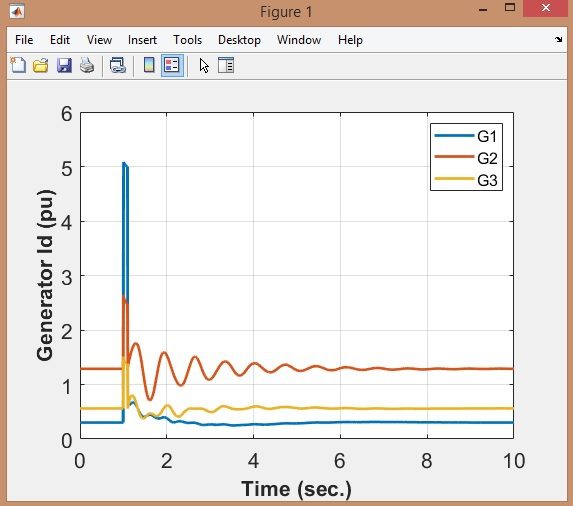
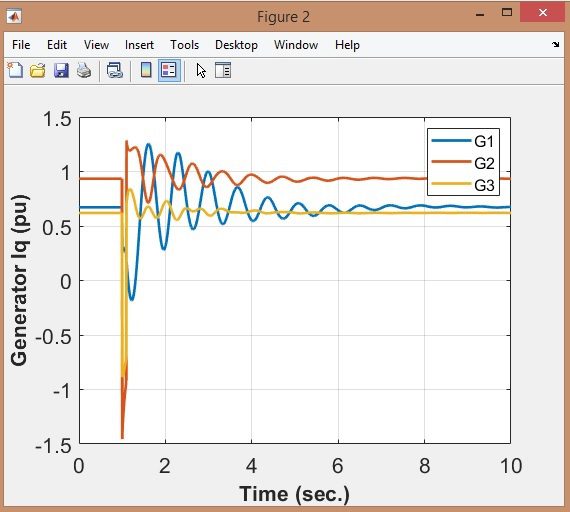
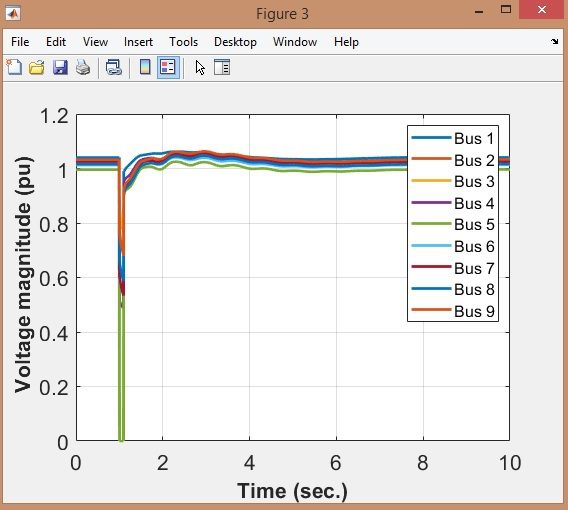
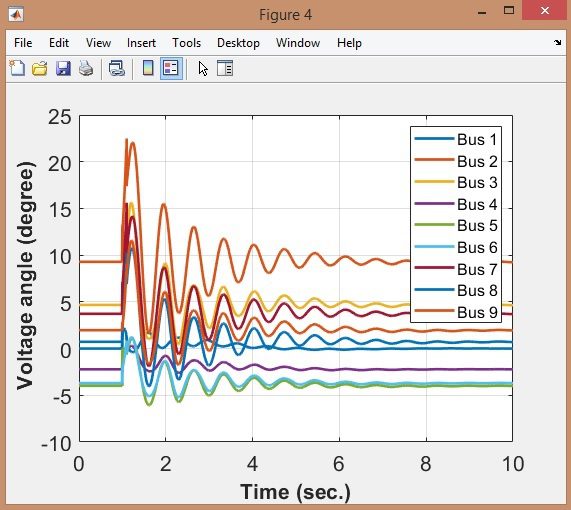
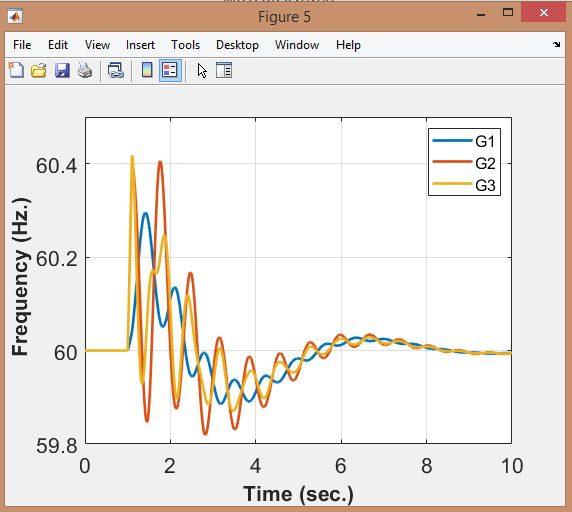
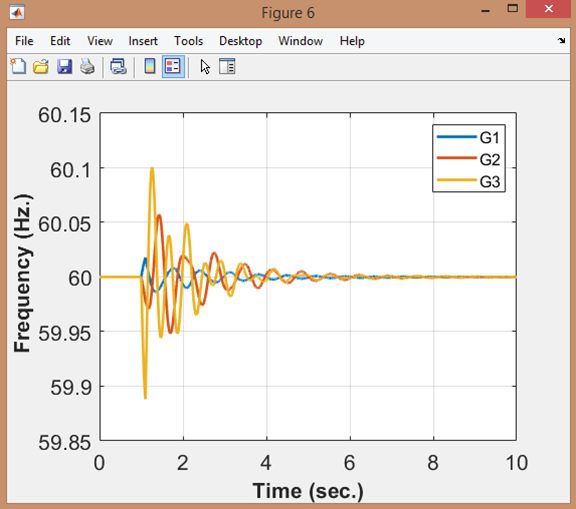
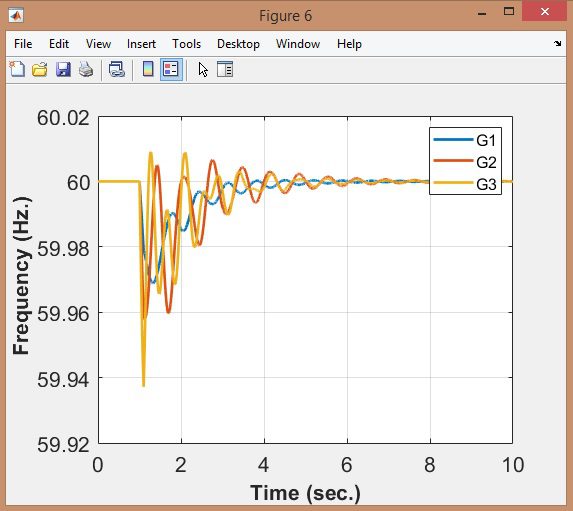
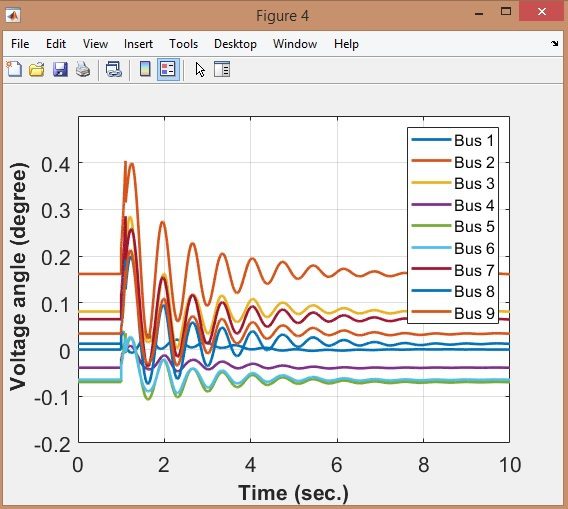
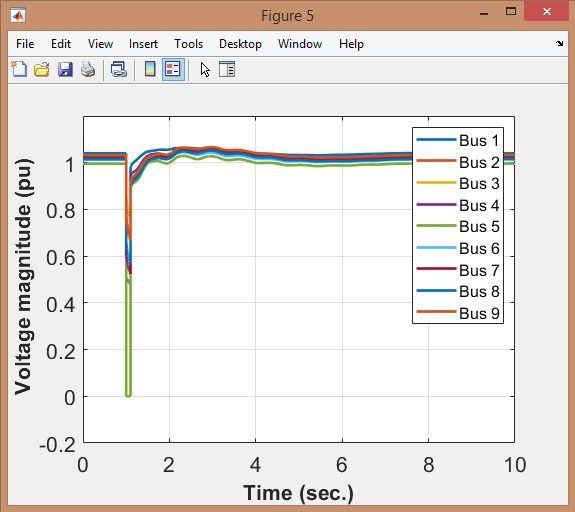
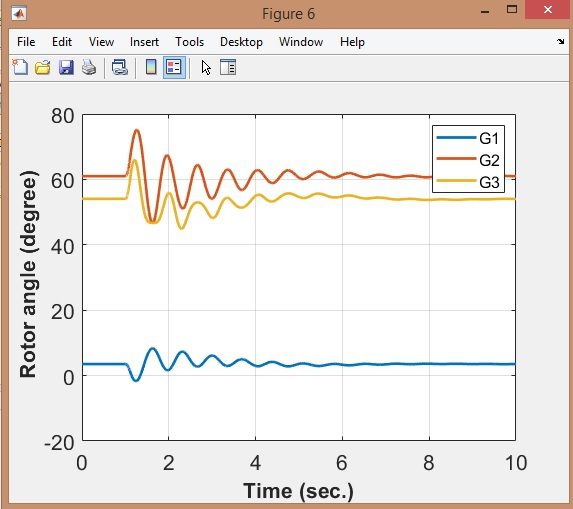
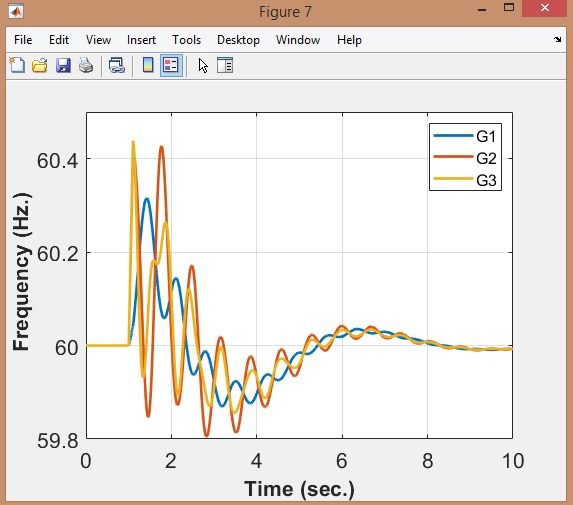
نتایج شبیه سازی:
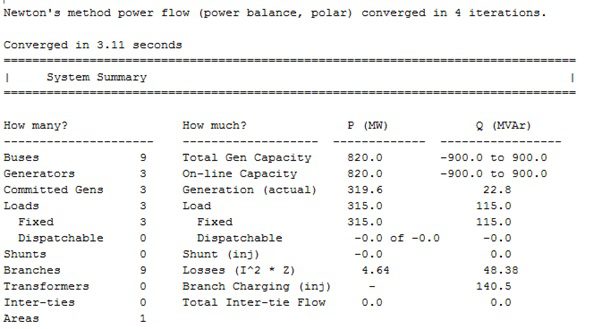
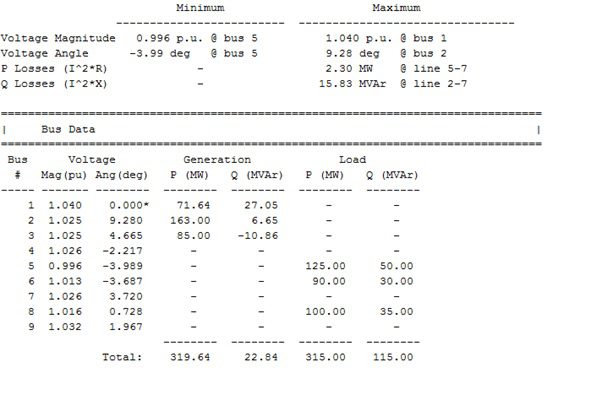
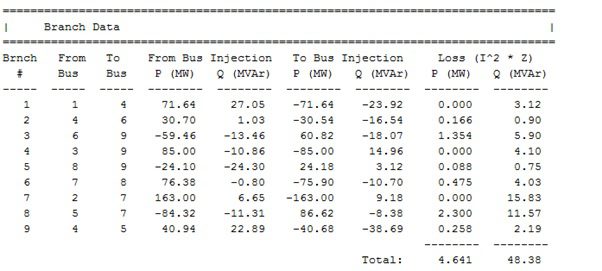
نتایج پخش بار با روش نیوتن و اغتشاشات در سمت ژنراتور برای شبکه 9 شینه:
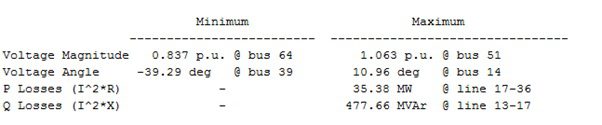
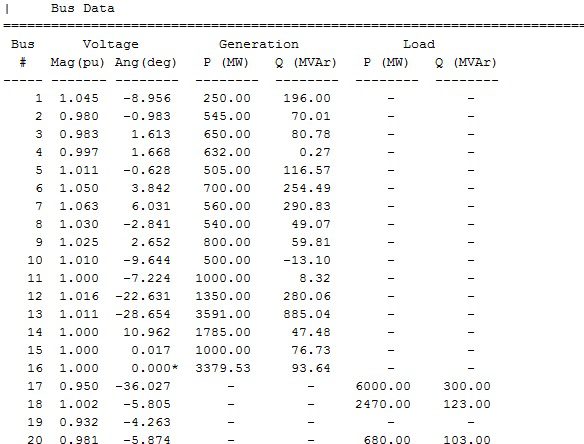
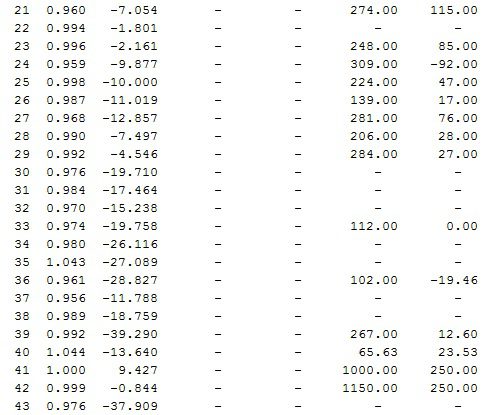
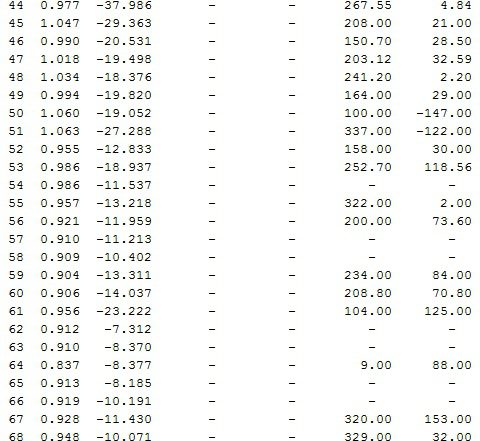
نتایج پخش بار و اغتشاشات در سمت برای شبکه 9 شینه و 68 شینه:
نتایج شبکه 9 شینه با حل صریح:
حل ضمنی:
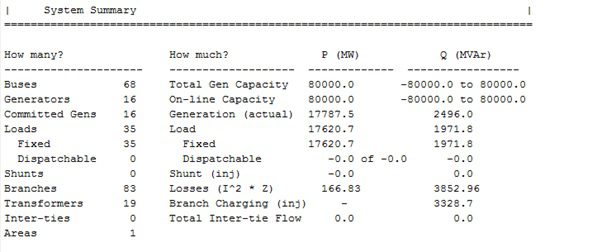
نتایج پخش بار شبکه 68 شینه:
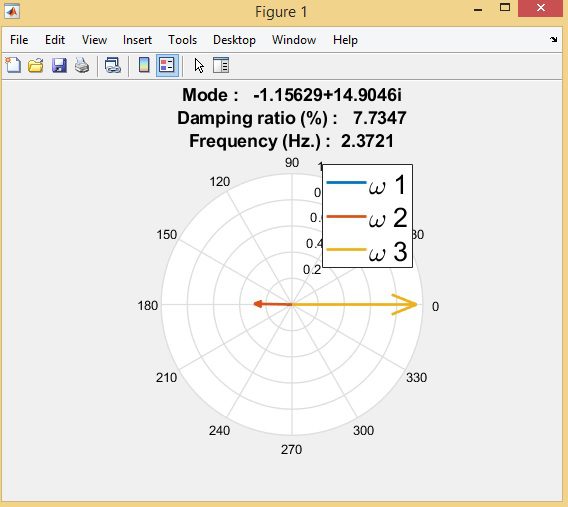
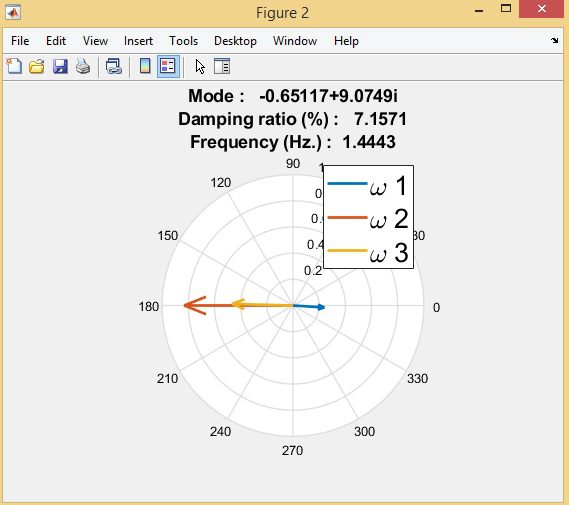
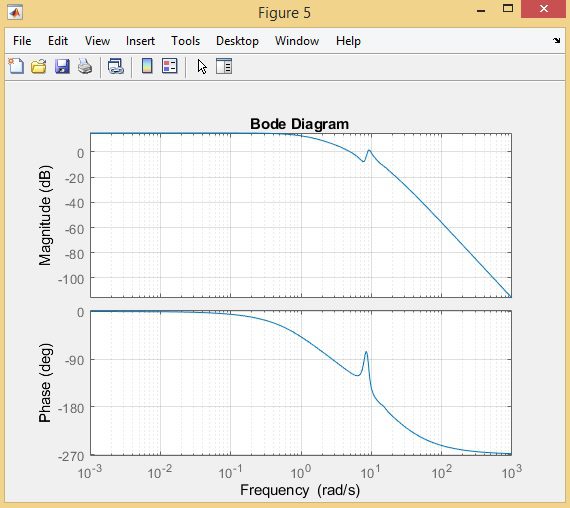
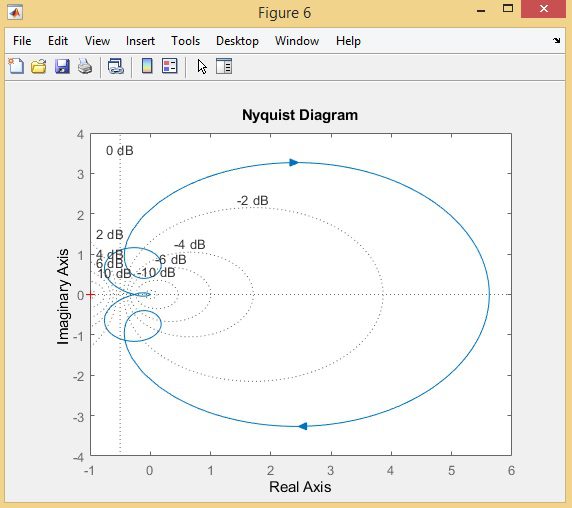
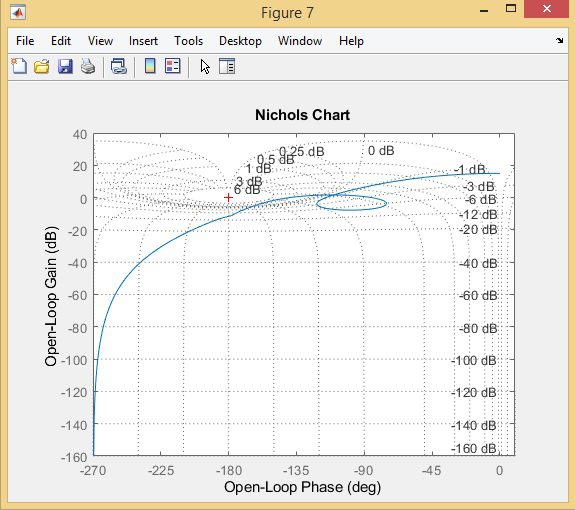
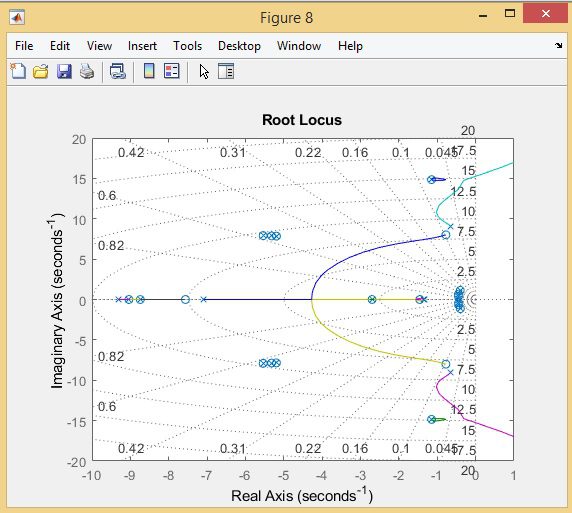
نتایج تحلیل پاسخ فرکانسی:
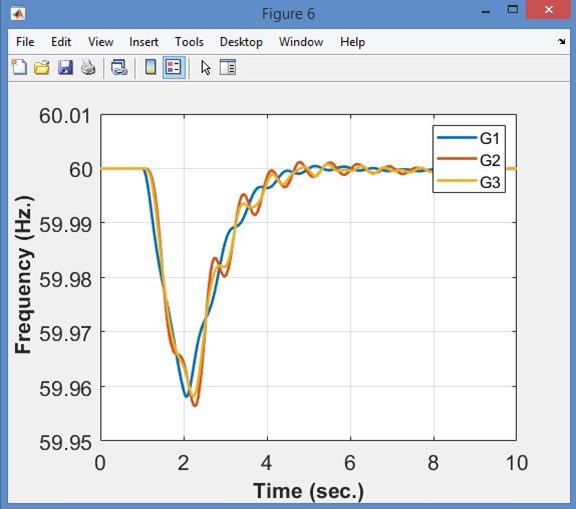
نتایج سیمولینک :