توضیحات
شبیه سازی شتاب سنج خازنی میکروماشین کاری شده سطحی با تکنولوژی MEMS در کامسول
در دهة اخیر فناوری ساخت ابزار دقیق در ابعاد بسیار ریز رشد فزایندهای پیدا کرده و استفاده از حسگرها و عملگرهای میکرو و نانومتری در حوزه های فراوانی گسترش یافته است. از جهت رشد و موفقیت در بازار، یکی از موفق ترین سنسورها در این حوزه شتاب سنج های میکرو ماشین کاری شده می باشند.
روش های مختلفی برای ساخت میکروشتاب سنج ها وجود دارد. ماشین کاری حجمی و استفاده از تکنولوژی ساخت مدارهای مجتمع از جمله این روش هاست. ماشین کاری سطحی نیز از جمله روش های معمول در ساخت میکروشتاب سنج ها می باشد که طراحی موجود بر مبنای این تکنولوژی ساخت انجام شده است. ماده ای که معمولا در ماشین کاری سطحی برای ساخت شتاب سنج ها مورد استفاده قرار می گیرد پلی سیلیکون است. خواص جالبی چون نداشتن حلقه هیسترزیس و برابر بودن تنش تسلیم و شکست از دلایل استفاده از سیلیکون می باشد.
سیستم های میکروالکترومکانیک(MEMS):
به عنوان یکی از آینده دارترین تکنولوژی ها در قرن ۲۱ شناخته شده است که قادر است با یکپارچه سازی میکروالکترونیک و تکنولوژی میکروماشینکاری، تحولی شگرف در صنعت و محصولات مصرفی ایجاد کند. MEMS یک تکنولوژی برای ساخت قطعات و سیستم های کوچک مجتمع می باشد که از ترکیب تجهیزات و قطعات الکترونیکی و مکانیکی بوجود می آیند. این سیستم ها و قطعات با استفاده از روش های ساخت مدار مجتمع ساخته می شوند و اندازه آنها از میکرومتر تا میلی متر تغییر می کند. در تولید MEMS، مباحث طراحی، مهندسی و ساخت (گستره وسیعی از تکنیک ها مثل تکنولوژی ساخت مدار مجتمع، مهندسی مکانیک، علم مواد، مهندسی برق، فیزیک، شیمی و مهندسی شیمی و …) استفاده می شوند.
تعریف MEMS:
MEMS تکنولوژی ساخت قطعات و سیستم های مجتمع متشکل از اجزای الکتریکی و مکانیکی می باشد که از روشهای تولید گروهی استفاده می کند. کلمه MEMS که مخفف میکروسیستم های الکترومکانیکی است، در آمریکا رایج بوده، در حالیکه در اروپا تکنولوژی میکروسیستم و در ژاپن میکروماشین ها رایج می باشد. فرآیندهای میکروماشینکاری حجمی و سطحی برای برداشتن و یا قراردادن لایه هایی از سیلیکون و یا مواد دیگر بکار می روند تا اجزای مکانیکی و الکترومکانیکی را تولید کنند. مدارهای مجتمع از خواص الکتریکی سیلیکون استفاده می کنند، در حالیکه MEMS از خواص مکانیکی و مزایای دیگر سیلیکون استفاده می کند. در بیشتر موارد، MEMS شامل میکروساختار، میکروحسگر، میکروعملگر و مدارهای میکروالکترونیک می باشد
شکل زیر مجموعه این اجزاء را بطور شماتیک نشان می دهد.
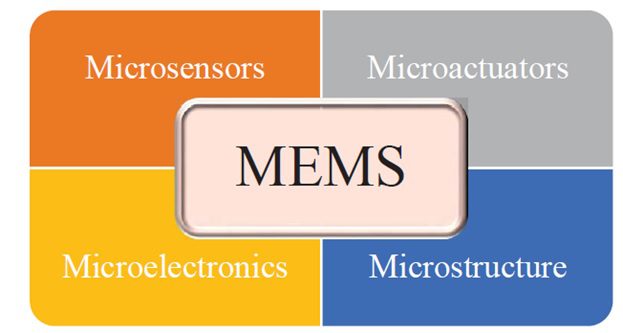
شکل اجزاء موجود در یک قطعه MEMS.
میکروحسگر تغییرات محیط اطراف سیستم را از طریق اندازه گیری پدیده ها و اطلاعات مکانیکی، حرارتی، مغناطیسی، شیمیایی و یا الکترومغناطیسی شناسایی می کند. بخش میکروالکترونیک این اطلاعات را پردازش می کند و سیگنال کنترلی را به عملگر می فرستد تا تغییرات لازم انجام شود. معمولا قطعات MEMS در ابعاد میکروسکوپیک هستند. اهرمها، چرخ دنده ها، پیستون ها و حتی موتورهای بخار با MEMS ساخته شده اند. باید ذکر کرد که MEMS فقط برای کوچک کردن اجزای مکانیکی نیست چون بعضی وقت ها به وسایل میکروماشینکاری شده ای گفته می شود که اصلا مکانیکی نیستند. کاربرد در زمینه های مخابرات نوری و بیسیم، مهندسی پزشکی و کنترل فرآیند MEMS، می باشند. به هرحال، پتانسیل اصلی برای قطعات MEMS از سال ۱۹۵۰ به بعد به صورت محصولات امروزی و خارج از آزمایشگاه در آمد. وسایل مختلفی چون میکروحسگرها مثلا در شتاب سنج کیسه هوای وسایل نقليه، فشارسنج پزشکی و هد چاپگر جوهر افشان از نمونه هایMEMS می باشد. همچنین MEMS پایه تولید محصولاتی است که به روش های دیگر قابل تولید نیستند. در کنار MEMS با تکنولوژی ساخت گروهی، به افزایش بازده و قابلیت اطمینان، کاهش اندازه، وزن و قیمت می انجامد .
حسگرها
حسگرها وسایلی برای اندازه گیری اطلاعات محیط اطراف و تولید سیگنال خروجی الکتریکی در پاسخ به تغییرات پارامترهای اندازه گیری شده می باشند. دامنه انرژی قابل حس در حسگرها شامل انواع زیر می باشد:
- مکانیکی (نیرو، فشار، سرعت، شتاب و…)
- حرارتی (دما، آنتروپی، گرما، شار حرارتی و …)
- شیمیایی (نرخ واکنش، غلظت و…)
- تشعشعی (شدت موج الکترومغناطیسی، طول موج و …)
- مغناطیسی شدت میدان، چگالی شار و…)
- الکتریکی (ولتاژ، جریان، مقاومت، ظرفیت و…)
عملگرها
عملگر وسیله ای برای تبدیل سیگنال الکتریکی به حرکت و یا نیرو می باشد. این وسیله می تواند برای کنترل خودش و یا محیط اطراف عمل کند. میکروعملگرها می توانند برای جابه جاکردن جرم های کوچک استفاده شوند. نیروی حاصل از این قطعات بسیار کم می باشد (در حدود میکرو نیوتن).
تاریخچه MEMS:
دهه ۱۹۵۰ مرحله کشف و شروع کار MEMS بود. در سال ۱۹۵۴ اثر پاییز ومقاومتی در سیلیکون و ژرمانیم، توسط اسميت کشف شد. رواج کرنش سنج های سیلیکونی در سال ۱۹۵۸ بود و در سال ۱۹۵۹ ریچارد فاینمن سخنرانی با عنوان “فضای زیادی در این جاهای کوچک وجود دارد” در موسسه تکنولوژی کالیفرنیا انجام داد. او در این سخنرانی جایزه ای برابر ۱۰۰۰ دلار برای اولین کسی که موفق به ساخت موتور الکتریکی کوچکتر از 1/64 اینچ تعیین کرد.
دهه ۱۹۶۰ مرحله توسعه تکنولوژی بود. در سال ۱۹۶۱ اولین فشارسنج سیلیکونی معرفی شد. با اختراع میکروماشینکاری سطحی در سال ۱۹۶۷، وستینگهاوس ترانزیستور اثر میدانی ساخت که گیت آن مرتعش بود. در این سال ها استفاده از لایه قربانی برای آزادسازی سازه های روی زیرلایه سیلیکونی گسترش یافت. تجارت و توسعه بازار نیز در این دهه اتفاق افتاد.
دهه ۱۹۷۰ مرحله فرآیند گروهی بود که در آن صدها قطعه MEMS بطور همزمان ساخته می شوند. در سال ۱۹۷۰ اولین حسگر شتاب سیلیکونی معرفی شد و در سال ۱۹۷۹ اولین نازل جوهرافشان با میکروماشین کاری ساخته شد. همچنین ساخت میکروغشاء سیلیکونی با روش خوردگی ناهمسانگرد انتخابی بهبود یافت.
دهه ۱۹۸۰ دوره پیشرفت میکروماشین کاری بود. در این دهه حسگر فشار قابل کاشت در بدن برای مصارف پزشکی ساخته شد. در سال ۱۹۸۲ سیلیکون به عنوان یک ماده مکانیکی شناخته شد و همچنین فرآیند LIGA ابداع شد. در سال ۱۹۸۸ اولین کنفرانس MEMS برگزار شد.
دهه 1990 مرحله پیشرفت حسگرها با استفاده از میکروماشینکاری بود. در سال ۱۹۹۲ اولین لولای میکروماشینکاری شده تولید شد. یک سال بعد اولین حسگر شتاب میکرو ماشینکاری شده به فروش رسید. در سال ۱۹۹۴ خوردگی یونی واکنش زای عمیق ابداع شد.
در سال ۲۰۰۰ اجزا ارتباط نوری MEMS رونق یافتند. امروزه قطعات MEMS بطور گسترده ای در صنعت، پزشکی، محصولات مصرفی و آزمایشگاهی و … استفاده می شوند.
کاربردهای MEMS:
میکروماشینکاری سیلیکون ما را قادر می سازد که سیستم های پیچیده را با همان قیمت سیستم های ساده تولید کنیم. بنابراین می توان بسیاری از عملکردها را در یک قطعه واحد مجتمع کرد. با استفاده از سیلیکون ترکیب عملکردهای مکانیکی و الکترونیکی امکان پذیر می شود. قطعات MEMS در خودرو، پزشکی، هوافضا و … کاربردهای زیادی دارند که ناشی از وزن و قیمت کم و قابلیت اطمینان بالا می باشد.
کاربرد در صنعت خودرو:
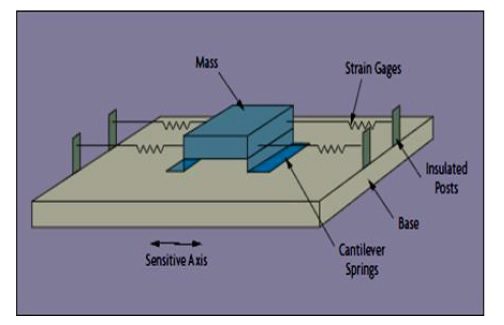
بیشترین کاربرد MEMS در صنعت خودرو می باشد که بیش از ۶۰ درصد از بازار MEMS را در دست دارد. از موارد استفاده در خودرو می توان به حسگر شتاب در کیسه هوای خودرو، حسگر فشار در سیستم سوخت رسانی، حسگرهای فشار و شتاب در سیستم تعلیق، نازل انژکتور، حسگر فشار در چرخ ها، حسگر دما در سیستم تهویه و … نام برد. در اینجا کمی درباره حسگر شتاب کیسه هوا صحبت خواهد شد.
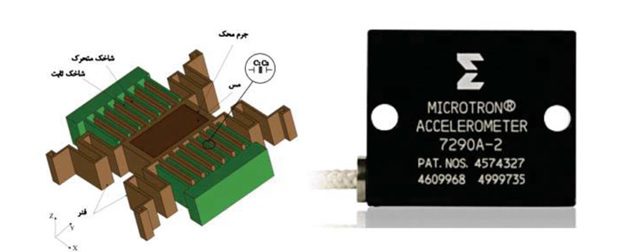
یکی از اولین استفاده ها و پایه های موفقیت MEMS، حسگر کیسه هوا می باشد که هم اکنون به طور گستردهای استفاده می شود. این حسگر که شامل اجزا مکانیکی و الکترونیکی می باشد، شتاب خودرو را در برخورد با موانع اندازه می گیرد و با ارسال سیگنال لازم به ماشه باعث پرشدن انفجاری کیسه هوا می شود تا از برخورد سر راننده با فرمان و یا داشبورد خودرو جلوگیری شود. انواع ابتدایی کیسه هوا دارای حجم و وزن زیاد و قیمت بالا بودند که با استفاده از MEMS این سیستم در یک تراشه کوچک سیلیکونی با قیمتی بسیار پایین تر تولید شد. شتاب سنج نشان داده شده در شکل زیر یک قطعه خازنی یا پاییز ومقاومتی شامل سه جزء زیرلایه، تیر و جرم متصل به تیر می باشد. تغییر در سرعت که باعث ایجاد شتاب می شود بر اساس اینرسی بر روی جرم معلق اثر کرده و در نهایت باعث انحنای تیر می شود که این تغییر شکل تیر، مقاومت جزء پاییز و مقاومت و یا ظرفیت خازنی را تغییر می دهد و این تغییرات به بخش میکروالکترونیک فرستاده می شود و شتاب اندازه گیری می شود.
قابلیت اطمینان MEMS، با فروش میلیونی و چند ده ساله به اثبات رسیده است که یک مثال از موفقیت آن، BMW 740i میباشد که بیش از ۷۰ قطعه MEMS در قسمت های مختلف نظیر سیستم ترمز ضد قفل، سیستم تعلیق فعال، سیستم کنترل، حسگر سوخت و … به کار برده است.
کاربرد در الکترونیک:
از دیگر کاربردهای موفقیت آمیز MEMS می توان چاپگرهای جوهر افشان را نام برد. یک چاپگر جوهرافشان با استفاده از تعدادی نازل، ذرات بسیار میکرو جوهر را به طور مستقیم بر روی کاغذ می پاشد. مکانیسم های مختلفی برای پاشیدن جوهر وجود دارد که روش های حرارتی و پاییزوالکتریک از انواع پرکاربردتر می باشند.
در تکنولوژی حرارتی، از تشکیل و انبساط یک حباب در جوهر، در اثر حرارت استفاده می شود. درون هد، تعدادی مقاومت کوچک که به گرمکن معروفند وجود دارد. این مقاومت ها با کنترل ریز پردازنده ها در زمانی کمتر از ۳ میکروثانیه داغ میشوند. جوهر روی هر مقاومت تا دماهای بالا 100×106 درجه سانتیگراد گرم میشود که باعث بخار شدن جوهر و تشکیل حباب می شود. با انبساط حباب مقداری جوهر از نازل خارج می شود و روی کاغذ می نشیند. با سرد شدن و فروکش کردن حباب، خلایی در هد ایجاد شده که باعث میشود جوهر از مخزن به هد ریخته شود.
MEMS با کوچکتر کردن المان های حرارتی و دیگر اجزاء ما را قادر می سازد که تعداد بیشتری نازل در هد قرار دهیم. در چاپگرهای اولیه ۱۲ نازل وجود داشت که تفکیکdpi 92 تولید می کردند. ولی اکنون تا 600 نازل وجود دارد که تفکیک dpi 1200 تولید می کنند.
میکروسیستم های الکترومکانیکی زیستی
در طی سال های اخیر محصولات ابتکاری توسط شرکتهای تولیدی BioMEMS ساخته شده که کاربردهای زیادی در پزشکی و درمان بیماری ها داشته اند. یک نمونه از این وسایل میکرودستگاه تزریق انسولین در داخل بدن است که در انواع اولیه سیگنال تحریک خود را از بیرون بدن از طریق سیم دریافت می کرد. در انواع پیشرفته تر کنترل بدون سیم شده و در نهایت، هدف، ساخت وسیله ای است که با حسگرهای موجود روی همان تراشه در درون بدن و در پاسخ به سیگنال های درون بدن تحریک شود.
شتاب سنج:
شتاب سنج دستگاهی است که مقدار شتاب صحیح را اندازه گیری می کند. شتاب صحیح شتاب نسبت به جسم در حال سقوط آزاد است. شتاب سنج دارای مدل های یک محوری و چند محوری است که می توانند اندازه و جهت شتاب را به عنوان یک کمیت برداری اندازه گیری کنند، می توان از حسگرهای شتاب سنج برای تعیین موقعیت و آشکارسازی لرزش و ضربه استفاده کرد. شتاب سنجهای ریز ماشین کاری شده با روند رو به افزایشی در لوازم الکترونیکی قابل حمل و کنترلرهای بازی های کامپیوتری برای تعیین موقعیت و به عنوان ورودی بازی های کامپیوتری به کار می روند.
اصول فیزیکی شتاب سنج:
شتاب سنج مقدار شتاب صحیح را که شتاب نسبت به جسم در حال سقوط آزاد است را اندازه گیری می کند. شتاب صحیح شتابی است که اجسام و اشخاص آن را احساس می کنند. معمولا شتاب را برحسب نیروی گرانش اندازه گیری می کنند. به عبارت دیگر، بر اساس اصل هم ارزی در فیزیک در هر نقطه از فضا یک دستگاه مرجع مانا وجود دارد و شتاب سنج شتاب نسبت به آن دستگاه شتاب را اندازه می گیرد. به این صورت که فرض می کند اگر قرار بود در دستگاه مرجع مانا بدون شتاب باشد هیچ نیرویی به آن وارد نمی شد و حال نیروهای وارد به خود را اندازه می گیرد و شتابی را که باید داشته باشد حدس می زند.
شتاب صحیح شتابی است که با توجه به نیروهای وارد بر جسم محاسبه می شود. طبق اصل هم ارزی تفاوتی بین جسمی که در یک سفینه فضایی با شتاب ۱g حرکت می کند و جسمی که روی زمین قرار دارد و تحت نیروی گرانش ۱g قرار دارد وجود ندارد و تحت اثر همان نیروهایی قرار دارد که جسم در حال حرکت شتاب دار تحت اثر آن ها است؛ بنابراین شتاب سنجی که در حالت ساکن نسبت به سطح زمین قرار گرفته است شتابی برابر به سمت بالا را نشان خواهد داد، زیرا هر نقطه روی سطح زمین نسبت به دستگاه مرجع لخت محلی به سمت بالا شتاب می گیرد. این دستگاه مرجع لخت محلی دستگاه یک جسم در حال سقوط آزاد روی سطح زمین است. برای اینکه مقدار شتاب خالص ناشی از حرکت را نسبت به زمین به دست آوریم باید مقدار تفاوت شتابی که گرانش ایجاد می کند را کم کرد. از آنجایی که نیروی گرانش موجب شتاب صحیح نمی شود و 1g شتاب سنج نسبت به شتاب گرانشی حساس نیست و مقدار آن را نمی تواند مستقیما اندازه گیری کند، این موضوع به طور کلی در مورد هر میدان گرانشی درست است.
علت وجود اختلاف به دلیل گرانش را می توان با اصل هم ارزی انیشتین توجیه کرد. این اصل بیان می کند که اثر گرانش بر اجسام از اثر شتاب دستگاه مرجع غير قابل تفکیک است. هنگامی که در یک میدان گرانشی به وسیله اعمال نیروی واکنش از طرف زمین و یا نیروی مخالف برابر دیگری به سمت بالا در حالت سکون هستیم، دستگاه مرجع برای یک شتاب سنج (بدنه شتاب سنج) نسبت به دستگاه مرجع متصل به جسم در حال سقوط آزاد دارای شتابی به سمت بالا است. اثر شتاب این دستگاه مرجع از هر شتاب دیگری که روی ابزار اعمال به سمت می شود، غیرقابل تفکیک است؛ بنابراین یک شتاب سنج نمی تواند تفاوت بین نشستن درون یک موشک روی سکوی پرتاب و حرکت در همان موشک با شتاب ۱g در اعماق فضا را تشخیص دهد. به همین دلیل یک شتاب سنج در هنگام سقوط آزاد شتاب صفر را نشان میدهد. این موضوع شامل استفاده از شتاب سنج درون یک سفینه اکتشافی در اعماق فضا و به دور از هر جرم، سفینه ای که به دور زمین می گردد، هواپیمایی که در قوس سهموی صفر یا هر مسیر سقوط آزاد دیگری در خلأ را طی می کند، می شود.
یک مثال برای این مورد سقوط آزاد از ارتفاع زیاد با صرف نظر از اثر اتمسفری است. اگرچه این موضوع در مورد یک سقوط غیر آزاد که مقاومت هوا موجب نیروی پس کشی و کاهش شتاب می شود صدق نمی کند، ولی پس از اینکه به سرعت حد رسیدیم، شتاب سنج شتاب ۱g به سمت بالا را احساس می کند. این شتاب ناشی از نیروی پس کشی است. مثالی عملی از این مسئله هنگامی است که یک چترباز در حال سقوط به سرعت حد می رسد و دیگر احساس نمی کند که در حال سقوط آزاد است و احساسی مشابه خوابیدن روی تختی از هوا دارد.
شتاب در دستگاه SI با واحد متر بر مجذور ثانیه (m/s2) در دستگاه cgs با واحد Gal و به طور معمول با واحد نیروی گرانش(g) تعیین می شود.
به دلایل عملی برای اندازه گیری شتاب اجسام نسبت به زمین، مثلا برای استفاده در سیستم های ناوبری ماندی، اطلاعاتی از گرانش در محل موردنیاز است؛ که این مشکل از طریق تنظیم دستگاه در حالت سکون یا از طریق یک مدل تقریبی از گرانش در محل کنونی برطرف می شود.
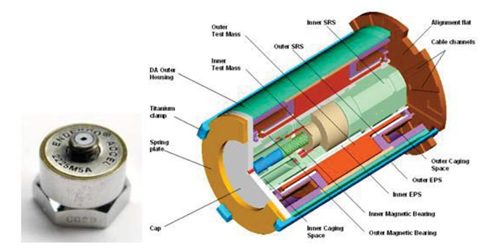
ساختار شتاب سنج:
به طور مفهومی، یک شتاب سنج مانند یک جسم میرا کننده روی یک فنر عمل می کند. هنگامی که شتاب سنج با شتاب حرکت می کند، جسم به اندازهای جابجا می شود که نیروی واردشده از فنر به جسم، جسم را با شتابی برابر شتاب بدنه شتاب سنج حرکت دهد. سپس با اندازه گیری میزان جابجایی مقدار شتاب اندازه گیری می شود
شکل ساختار شتاب سنج.
شتاب سنج های جدید معمولاً بر پایه سیستم های الکترومکانیکی میکرومتری هستند. این ادوات درواقع سادهترین ادوات تحقق پذیر MEMS هستند(Micro Electro Mechanical Systems (MEMS)).
این ادوات دارای تیر آزادی هستند که به یک جرم لرزه ای متصل است می باشند؛ علاوه بر اینها شامل اندکی اجزای دیگر نیز می باشند. میرا کنندگی در اثر گازهای باقی مانده محبوس شده در داخل دستگاه ایجاد می شود. تا زمانی که Q-factor خیلی کم نیست، میرا کنندگی موجب حساسیت کم نمی شود. تحت اثر شتاب خارجی جرم لرزه ای متصل به تیر آزاد از مکان طبیعی خود منحرف میشود. این انحراف به صورت آنالوگ یا دیجیتال اندازه گیری می شود. معمولا خازن بين مجموعه ای از تیرهای ثابت و مجموعه ای از تیرهایی که به جرم های لرزه ای متصل اند اندازه گیری می شوند.
شکل زیر این روش ساده، قابل اعتماد و ارزان است.
شکل شتاب سنج خازنی.
گنجاندن مقاومت های پیزو در فنرها برای آشکارسازی تغییر شکل فنر و متعاقبا انحراف آنها جایگزین خوبی برای روش قبل می باشد ساختار این نوع شتاب سنج در شکل زیر نشان داده شده است. این روش تنها چند مرحله پردازش اضافه در فرایند ساخت نیاز دارد. برای حساسیت های بالا از تونل زنی کوانتومی نیز استفاده میشود. این روش نیاز به یک پردازش اختصاصی دارد که آن را بسیار گران می کند. اندازه گیری های نوری در محیط آزمایشگاهی انجام می شوند.
شکل شتاب سنج پیزو الکتریک.
نوع غیرمعمول دیگری از شتاب سنج های بر مبنای تکنولوژی MEMS شامل یک گرم کننده کوچک در پایین یک برآمدگی توخالی خیلی کوچک است. گرم کننده هوای داخل محفظه را گرم می کند و موجب بالا آمدن آن می شود. یک ترموکوپل بر روی محفظه مشخص می کند در کجا هوای گرم به محفظه می رسد و انحراف آن از مرکز برآمدگی محفظه اندازه گیری از شتابی است که به سنسور اعمال شده است. بیشتر شتاب سنج های میکرومکانیکی در صفحه کار می کنند، به این معنی که طوری طراحی شده اند که تنها به شتاب در راستای برش زیر لایه حساس هستند. به وسیله ترکیب کردن دو وسیله به صورت عمود بر یکدیگر بر روی یک زیر لایه می توان یک شتاب سنج دومحوری ساخت که شتاب را در دو راستا اندازه گیری می کند. به وسیله اضافه کردن یک وسیله شتاب سنج دیگر خارج از صفحه می توان در سه راستا شتاب را اندازه گیری کرد. این ترکیب همواره خطای بسیار کمتری نسبت به حالتی دارد که افزاره ها را پس از ساخت جداگانه باهم ترکیب کنیم.
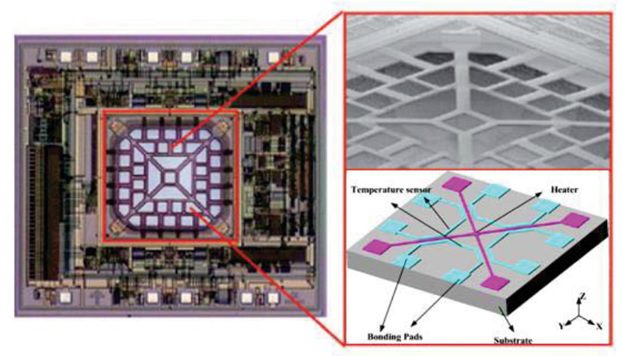
شکل شتاب سنج حرارتی.
شتاب سنج های میکرومکانیکی برای اندازه گیری در محدوده های بسیار وسیعی که به هزاران g هم می رسد، به کار می روند. طراح باید مصالحهای بین حساسیت و حداکثر مقدار شتاب قابل اندازه گیری انجام دهد.
کاربردهای شتاب سنج ها:
در دهه های اخیر فناوری ساخت ابزار دقیق در ابعاد بسیار ریز رشد فزاینده ای پیدا کرده و استفاده از حسگرها و عملگرهای میکرو و نانومتری در حوزه های فراوانی گسترش یافته است. شتاب سنج ها از مهم ترین و پرکاربردترین حسگرها در سیستم های متحرک می باشند. این حسگرها در سیستم هایی مانند شاتل فضایی، ماهواره ها یا اتومبیل قابل استفاده می باشند. از کاربردهای شتاب سنج می توان موارد زیر را نام برد:
- ربات های خود متعادل
- هواپیماهای مدل بدون سرنشین
- سیستم های هشدار کشف برخورد
- ردیابی حرکات انسان
- سنسور تراز یا تعیین سطح افق
- کشف ارتعاشات برای عایق های ارتعاشی
- کشف کننده شتاب زمین
شتاب سنج ها می توانند برای اندازه گیری شتاب وسیله های نقلیه به کار روند. با استفاده از آنها می توان کارایی موتور و سیستم انتقال گشتاور و سیستم ترمز را ارزیابی کرد. شتاب سنج ها را می توان در اندازه گیری لرزش خودروها، ماشین ها، ساختمان ها، پردازش سیستم های کنترل و ایمنی نصب دستگاه ها به کار برد. در اندازهگیری فعالیت های زمین لرزه ای، انحراف، لرزش ماشینها، فاصله دینامیک و سرعت با تأثیر یا بدون تأثير گرانش میتوان از این سنسورها استفاده کرد. شتاب سنج هایی که گرانش را اندازه گیری می کنند و مخصوص این کار طراحی شده اند را گراویمتر می نامند.
یک سیستم ناوبری اینرسی یک ابزار کمکی برای ناوبری است که با استفاده از یک کامپیوتر و سنسورهای حرکت(شتاب سنج ها) موقعیت، جهت گیری و سرعت (جهت و تندی حرکت) یک جسم در حال حرکت را به طور پیوسته و به روش زمان مرده محاسبه می کند. این کار بدون نیاز به یک نقطه مرجع خارجی صورت می گیرد. اصطلاحات دیگری که برای اشاره به سیستم های ناوبری اینرسی استفاده می شوند یا و دستگاه های مشابه اشاره می کنند عبارت اند از: سیستم هدایت اینرسی، سیستم اینرسی مرجع و جایگشت های دیگر آن.
یک شتاب سنج به تنهایی برای آشکار کردن تغییرات ارتفاع در فواصلی که تغییر در گرانش عمودی قابل ملاحظه است مثلا در هواپیما و موشک، نامناسب است. در حضور گرادیان گرانشی، تنظیم دستگاه و پروسه کم کردن اطلاعات ناپایدار است. شکل زیر سیستم ناوبری اینرسی متشکل از شتاب سنج و ژیرسکوپ سه محوره را نشان می دهد.
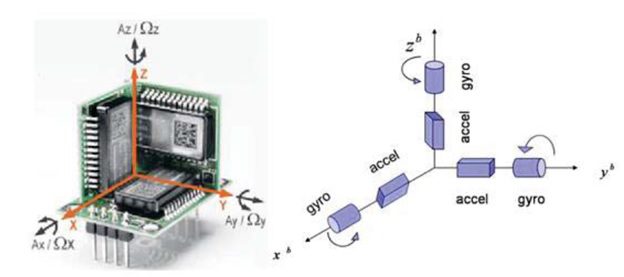
شکل واحد اندازه گیری اینرسی.
شتاب سنج ها برای مانیتور کردن سلامت دستگاه های چرخشی مانند پمپ ها، پنکه ها، غلتک ها، کمپرسورها و برج های خنک کننده استفاده می شوند. اثبات شده است که برنامه های مانیتور لرزش هزینه ها را کاهش میدهند، زمان از کارافتادگی دستگاه ها را کاهش می دهد و ایمنی کارخانه را افزایش می دهد. این امر به وسیله تشخیص موقعیت هایی مانند غیر هم محوری بافتها (محورها)، عدم تعادل موتورها و خرابی چرخ دنده ها یا خطا در نیرو که منجر به تعمیرات پرهزینه می شود، صورت می گیرد. اطلاعات لرزشی شتاب سنج ها به کاربر اجازه مانیتور کردن ماشین ها و پیدا کردن این خطاها را پیش از اینکه دستگاه چرخنده از کار بیافتد میدهد برنامه های مانیتورکردن لرزش در صنعت هایی مانند تولید خودرو، استفاده های ابزار کار، تولیدات دارویی، تولید انرژی و نیروگاههای خمیر کاغذ و کاغذ، تولید آشامیدنی و غذا، آب و فاضلاب و پتروشیمی و تولید فولاد به کار می روند.
شتاب سنج ها برای اندازه گیری حرکت و لرزش ساختمان هایی که تحت بارهای دینامیک هستند به کار میروند. بارهای دینامیک از منابع مختلفی ناشی می شوند، فعالیت های انسان مانند راه رفتن، دویدن، رقصیدن، یا پریدن ماشین های در حال کار در داخل ساختمان یا در محوطه اطراف آن. کارهای ساختمانی مانند جابجایی مقادیر زیاد خاک، تخریب ساختمان، حفاری، جابجایی بار روی پل ها، برخورد خودروها، نیروهای ضربه ای مانند اجسام در حال سقوط، ضربه های شدید مانند انفجارهای داخلی و خارجی، ریزش اجزای ساختمانی، نیروی باد و تندباد، فشار جریان تند هوا، از بین رفتن تکیه گاه ها به دلیل سستی زمین، زمین لرزه ها و پس لرزه ها، اندازه گیری و ثبت اینکه یک ساختمان چگونه به این ورودی ها پاسخ می دهد برای ارزیابی ایمنی و پایداری ساختار حیاتی است. این نوع از مانیتورینگ با مانیتورینگ پويا می نامند.
کاربردهای میکروشتاب سنج:
میکروشتاب سنج ها می توانند برای اندازه گیری شتاب وسیله های نقلیه به کار روند. با استفاده از آنها می توان کارایی موتور و سیستم انتقال گشتاور و سیستم ترمز را ارزیابی کرد. میکروشتاب سنج ها را می توان در اندازه گیری لرزش خودروها، ماشین ها و ساختمان ها، پردازش سیستم های کنترل و ایمنی نصب دستگاه ها، اندازهگیری فعالیت های زمین لرزه ای، انحراف، لرزش ماشین ها، فاصله دینامیک و سرعت با تاثیر یا بدون تاثیر گرانش به کار برد. میکروشتاب سنج هایی که گرانش را اندازه گیری می کنند و مخصوص این کار طراحی شده اند را گراویمتر می نامند. نوت بوک هایی که به میکروشتاب سنج مجهز شده اند می توانند در شبکه لرزه نگار شرکت کنند. چندین مورد استفاده از سنسور شتاب خصوصا در ربات ها در ادامه آورده شده است. ربات های خود متعادل، هواپیماهای مدل بدون سرنشین، سیستم هشدار، کشف برخورد، ردیابی حرکات انسان، سنسور تراز یا تعیین سطح افق، کشف ارتعاشات برای عایقهای ارتعاشی و کشف کننده شتاب زمین از دیگر کاربردهای میکروشتاب سنج ها می باشد.
سنسورهای شتاب برای مانیتور کردن سلامت دستگاه های چرخشی مانند پمپ ها، پنکه ها، غلتک ها، کمپرسورها و برج های خنک کننده استفاده می شود. اثبات شده است که برنامه های مانیتور لرزش، هزینه ها و زمان از کارافتادگی دستگاه ها را کاهش می دهد و ایمنی کارخانه را بالا می برد. این امر به وسیله تشخیص موقعیت هایی مانند غیر هم محوری شافت ها (محورها)، عدم تعادل موتورها و خرابی چرخ دنده ها یا خطا در نیرو که منجر به تعمیرات پرهزینه می شود، صورت می گیرد. اطلاعات لرزشی میکروشتاب سنج ها به کاربر اجازه مانیتور کردن ماشین ها و پیدا کردن این خطاها را پیش از اینکه دستگاه چرخنده از کار بیفتد، می دهد. برنامه های مانیتور کردن لرزش در صنعت هایی مانند تولید خودرو، تولیدات دارویی، تولید انرژی و نیروگاه ها، خمیر کاغذ و کاغذ، تولید آب آشامیدنی و غذا، آب و فاضلاب و پتروشیمی و تولید فولاد به کار می روند.
میکروشتاب سنج ها برای اندازه گیری حرکت و لرزش ساختمان هایی که تحت بارهای دینامیک هستند به کار می روند. بارهای دینامیک از منابع مختلفی ناشی می شوند؛ فعالیت های انسان مانند راه رفتن، دویدن، رقصیدن، یا پریدن، ماشین های در حال کار در داخل ساختمان یا در محوطه اطراف آن، کارهای ساختمانی مانند جابجایی مقادیر زیاد خاک، تخریب ساختمان، حفاری، جابجایی بار روی پل ها، ریزش اجزای ساختمانی، نیروی باد و تند باد، فشار جریان تند هوا، زمین لرزه ها و پس لرزه ها و … از جمله این منابع هستند. دوربین های فیلم برداری از میکروشتاب سنج ها برای پایدار کردن تصویر استفاده می کنند. هنوز دوربین ها از میکروشتاب سنجها برای گرفتن عکس غیر تار استفاده می کنند. دوربین از بسته شدن دیافراگم وقتی که دوربین در حال حرکت است جلوگیری می کند. وقتی که دوربین ساکن است (اگر فقط برای یک میلی ثانیه، همان گونه که این شرایط می تواند برای لرزش رخ دهد)، دیافراگم بسته می شود. برخی از دوربین های دیجیتال، دارای میکروشتاب سنج هستند تا جهت عکس در حین گرفته شدن را تعیین کند و همچنین در هنگام دیدن عکس فعلی بتوانند آن را بچرخانند.
بسیاری از لپ تاپ ها از میکروشتاب سنج استفاده می کنند، مثل سیستم فعال حفاظت لنووو و سنسور حرکت ناگهانی اپل، که برای شناسایی سقوط استفاده می شود. اگر سقوطی تشخیص داده شود، هد حافظه جدا می شود تا از نقصان داده و آسیب دیدن احتمالی هد یا حافظه جلوگیری شود. برخی از تلفن های هوشمند، پخش کننده های صدای دیجیتال و همیار شخصیهای دیجیتال، شامل میکروشتاب سنج ها برای کنترل سطح تماس با کاربر می باشند. مثال های معروف شامل اپل آیفون، نوکیا ان 97، اچ تی سی هرو می باشد.
کنسول بازی ویدئویی نینتندوز وی از کنترل کننده ای به نام وی ریموتاستفاده می کند که شامل شتاب دهنده سه بعدی است و به طور کلی برای ورودی حرکت استفاده میشود. همچنین کاربران امکان خریدن وسیله الصاقی حساس به حرکت اضافی را دارند که در نتیجه آن ورودی حرکت توسط هر دو دست کاربر بطور مستقل قابل ثبت است.
شرکت سونی در پلی استیشن از کنترل کننده از راه دور دوال شاک استفاده می کند که حاوی میکروشتاب سنجی شش بعدی است که برای واقع ای تر جلوه دادن کنترل فرمان در بازی های ماشین مسابقه ای می تواند استفاده شود. استفاده های دیگر میکروشتاب سنج ها در تلفن های نوکیا شامل کاربرد گام شمار می باشد. برخی دیگر از وسایل، با اجزای ارزان تری، سنجش شیب را فراهم می کنند که یک میکروشتاب سنج واقعی نیستند.
نوکیا 5500 از میکروشتاب سنجی سه بعدی استفاده می کند که از طریق نرم فزار قابل دسترسی است. این وسیله در شناسایی گام (شمردن) در کاربردهای ورزشی استفاده میشود و برای شناسایی وضعیت ضربه زدن در سطح تماس کاربر می باشد. وضعیت ضربه زدن می تواند برای کنترل پخش کننده های موسیقی و کاربردهای ورزشی استفاده شود. برای مثال تغییر به آهنگ بعدی با ضربه زدن به لباس وقتی که پخش کننده درون جیب است. میکروشتاب سنج ها با روند رو به افزایشی در علوم زیستی به کار می روند. ثبت فرکانس بالای شتاب های دوبعدی و سه بعدی اجازه مطالعه و شناخت الگوهای رفتاری را هنگامی که حیوانات از دید خارج می شوند را می دهند.
علاوه بر این، ثبت شتاب به محققان اجازه اندازه گیری آهنگ مصرف انرژی حیوانات در حیات وحش را به وسیله اندازه گیری فرکانس برخورد اندام ها را می دهد؛ یا می توان شتاب پویای کلی بدن را اندازه گیری کرد. این روش بیشتر به وسیله دانشمندان دریایی به خاطر عدم توانایی در مطالعه حیوانات در حیات وحش به وسیله مشاهدات دیداری مورد استفاده قرار می گیرد. اگرچه تعداد رو به افزایشی از زیست شناسان خشکی نیز روشهای مشابهی را استفاده می کنند.
در چند سال اخیر، شرکت های نایک، پولار و چند شرکت دیگر ساعت های ورزشی را برای دوندگان طراحی و به بازار عرضه کرده اند که دارای فوت پاد می باشد که دارای میکروشتاب سنج هایی است که به مشخص کردن سرعت و فاصله شخص کمک می کند. در بلژیک، برای ترغیب مردم به پیاده روی به میزان چندین هزار قدم در روز، گام شمارهای مبتنی بر میکروشتاب سنج توسط دولت ترویج می شوند.
آموزش دهنده دیجیتال هرمان از میکروشتاب سنجها برای اندازه گیری نیروی ضربه در تمرینات بدنی استفاده می کند. تعدادی از نوت بوک های مدرن از میکروشتاب سنجها برای هم تراز کردن خودکار صفحه نمایش بسته به اینکه وسیله در چه جهتی نگاه داشته می شود، استفاده می کنند. این جنبه در تبلت پی سی اس و برخی از تلفن های هوشمند و دوربین های دیجیتال مورد استفاده قرار گرفته است.
برای مثال، اپل از شتاب دهنده ال آی اس 302 دی ال استفاده می کند که به وسیله آن امکان تشخیص زمانی که کج می شود را دارد. گسترش دهنده های شخص ثالث، استفاده از میکروشتاب سنج ها را با کاربردهای تزینی مثل عروسک های با سر گردان توسعه داده اند. همچنین برخی از مدهای گوشی های بلک بری و استورم ۲ این جنبه جهت یابی را اضافه کرده اند.
برخی مدل های نوکیا دارای میکروشتاب سنج های تعبیه شده درون آنها هستند. این وسیله بطور کلی به عنوان سنسور شیب برای جهت یابی وضعیت عکس گرفته شده توسط دوربین داخلی می باشد.
جاذبه سنج وسیله ای است که برای اندازه گیری میدان جاذبه موضعی استفاده می شود. جاذبه سنج نوعی شتاب سنج است با این تفاوت که میکروشتاب سنج ها حساس به همه ارتعاشها از جمله نویز هستند که منجر به شتاب نوسانی می شود. این امر در جاذبه سنج ها با ایزوله کردن نوسان اصلی و پردازش سیگنال خنثی می شود. اگرچه استاندارد اصلی طراحی مشابه میکروشتاب سنج می باشد ولی جاذبه سنج ها حساس تر از شتاب سنجها طراحی می شوند تا تغییرات بسیار کوچک جاذبه، در حدود ۱متر بر مجذور ثانیه، در میدان زمین را اندازه گیری کند. از سوی دیگر، میکروشتاب سنجهای دیگر معمولا برای اندازه گیری ۱۰۰۰متر بر مجذور ثانیه یا بیشتر طراحی می شوند، و بسیاری دیگر اندازه گیری های چند بعدی را اجرا می کنند. محدودیت در دقت دمایی معمولا برای جاذبه سنج ها کمتر است، در نتیجه دقت به وسیله پردازش خروجی با ثابت زمانی طولانی تر قابل افزایش است.
اخیرا در بازی های کامپیوتری نیز برای شناسایی حرکات کج شدن دسته استفاده می شود. یکی از معمول ترین کاربردهای میکروشتاب سنج ها در گسترش سیستم کیسه هوا در وسایل نقلیه مدرن است. در این حالت میکروشتاب سنج ها برای شناسایی شتاب منفی سریع وسیله نقلیه استفاده می شوند تا مشخص کنند که چه زمانی یک برخورد صورت گرفته و شدت برخورد چقدر بوده است.
یکی دیگر از کاربردهای این وسیله در خودروها، سیستم های کنترل پایداری الکترونیکی است که از یک میکروشتاب سنج جانبی برای اندازه گیری نیروهای کناری استفاده می کند. استفاده گسترده از میکروشتاب سنج ها در صنعت خودرو قیمت آنها را بطور قابل توجهی کاهش داده است. یکی دیگر از کاربردها در خودرو، چک کردن نویز، لرزش و سختی(ان وی اچ) است، شرایطی که باعث ناراحتی برای رانندگان و مسافران می شود و همچنین ممکن است نشان دهنده نقص های مکانیکی باشد. اتومبیل های پر شتاب از میکروشتاب سنج ها و ژیروسکوپ ها برای محاسبه شتاب مورد نیاز استفاده می کنند
ساختار شتاب سنج:
MEMS یا ممز یک تکنولوژی است، که قادر به ساخت دسته ای از ساختارها ، دیوایس ها وسیستم های مکانیکیMEMS کوچک شده است. این تکنولوژی دارای تعدادی مزیت ها نسبت به تکنولوژی مدارهای مجتمع دارد:
۱- کاهش هزینه در ساخت.
۲- ثبات دیوایس به دیوایس از تکنولوژی لیتوگرافی واچینگ.
٣- پیشرفت نقش کلی آن ها در مقیاس پایین که به کاهش وزن و اندازه منجر می شود.
سیلیکون یک ماده مناسب برای ساخت دیوایس های MEMS است. زیرا این ماده دارای خواص فیزیکی و مکانیکی خوب برای ماشین کاری دارد. همچنین سیلیسیوم ارزان قیمت و به وفور در معادن یافت می شود. در سال ۱۹۹۲ خواص مکانیکی MEMS توسط پترسن انجام شده است. مشخصات مفید این دیوایس ها باعث شده است، که MEMS یک تکنولوژی پیروز در تعدادی حوزه های کاربردی شامل شتاب سنج ها، سنسورهای فشار، میکرو اپتیک و غیره باشد. مواد استفاده شده در ساختار شتاب سنج در ادامه ارائه می شود.
سیلیکون:
از جمله معدود موادی است که به صورت مصنوعی به فرم تک بلور ساخته شده است. ماهیت تک بلور خواص الکتریکی و مکانیکی خاصی را به ماده می بخشد که مزایای ویژه خود را دارد. از جمله می توان گفت که در حالت تک بلور سیلیسیوم یک ماده هوکی کامل می باشد یعنی به طور تقریبی هیچ تنش پسماندی نداشته و کمترین اتلاف انرژی را دارد. این ویژگی Si را در مقابل شکست ناشی از خستگی مقاوم می سازد. همچنین می توان با افزودن ناخالصی هایی به صورت کنترل شده، رسانایی الکتریکی Si را با دقت بالایی با توجه به نیاز و کاربرد موردنظر تنظیم نمود.
اکسید و نیترید سیلیسیوم:
انواع مختلفی از اکسیدهای پایدار Si نظیر SiO2 به دلیل خاصیت عایق الکتریکی و حرارتی بودن به طور گسترده در میکرو ماشین کاری به کار می رود. نیترین سیلیکون SixNy نیز به عنوان مانعی در برابر نفوذ یون های موجود در محیط (مثل یون های سدیم و پتاسیم موجود در محیط کاربردهای بیولوژی) به کار می روند.
روش های ساخت شتاب سنج:
ساخت MEMS مبتنی بر فرآیند میکروماشین کاری می باشد؛ که آن را می توان مجموعه ای از ابزار طراحی و ساخت بسیار دقیق تعریف نمود که ساختارهایی را در ابعاد خیلی کوچک شکل می دهد. در پیشرفت این فناوری روش های به کار رفته در ساخت مدارهای مجتمع نقش بسیار مهمی داشته است، به طوری که روش های ساخت MEMS بسیار مشابه IC هستند. از روش های میکرو ماشین کاری می توان موارد زیر را نام برد:
میکروماشین کاری بالک:
قدیمی ترین روش میکروماشین کاری محسوب می شود. این روش مشتمل بر حذف انتخابی برخی از زیر لایههای ماده به منظور رسیدن به قطعه موردنظر است. برای این کار روش های فیزیکی و شیمیایی وجود دارد که روش های شیمیایی کاربرد بیشتری دارند. در روش شیمیایی که قلم زنی خیس نام دارد. زیر لایه ها را در یک محلول شیمیایی واکنش پذیر قرار داده و این محلول سطح خارجی این زیر لایه ها را به اصطلاح حک میکند.
شکل زیر این عملیات را نشان می دهد.
شکل میکروماشین کاری بالک.
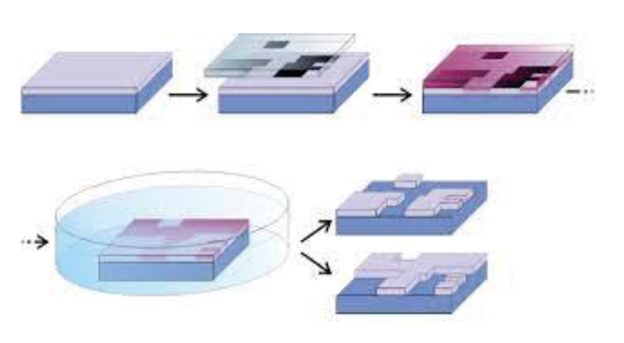
میکروماشین کاری سطحی(Surface Micromachining):
از دیگر فناوری های پرکاربرد در زمینه ساخت قطعات میکرو می باشد. همانطور که در شکل زیر نشان داده شده است. این روش شامل مجموعه ای از مراحل است که باجایدھی صفحات نازکی از ماده که به عنوان لایه اضافی عمل کرده تا لایه های ساختار اصلی ساخته شود. سپس با برداشتن این لایه های اضافی ساختار مکانیکی موردنظر تشکیل خواهد یافت.
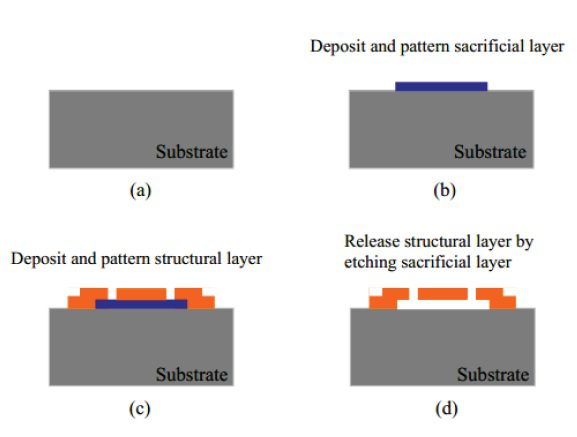
شکل عملیات میکروماشین کاری سطحی.
اتصال ویفری:
این روش مشابه جوشکاری در مقیاس ماکرو است در این روش از ترکیب دو یا چند ویفر یک لایه پیچیده تر ساخته می شود شکل زیر این روش مخصوصا برای ایجاد لایه هایی از Si تک بلور کاربرد دارد.
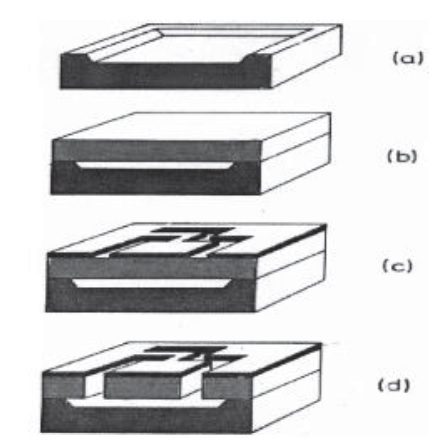
شکل عمليات اتصال ویفری.
علم و فناوری در ابعاد ریز(میکرو و نانو) توانایی به دست گرفتن کنترل ماده در ابعاد مولکولی و بهره برداری از خواص و پدیده های این بعد در مواد، ابزارها و سیستم های نوین است. صرفه جویی در مصرف انرژی، صرفه جویی در زمان، تامین محصول بیشتر با هزینه کمتر، افزایش کیفیت محصول و بهبود استانداردهای زندگی، ایجاد زندگی سالم، کاهش وابستگی های اقتصادی به سایر تکنولوژیها، ساخت مواد بسیار سبک و محکم برای مصارف مرسوم یا نو، ورشکستگی صنایع قدیمی همچون فولاد، کاهش شدید تقاضا برای سوخت های فسیلی، همه گیر شدن ابر کامپیوترهای بسیار قوی، کوچک و کم مصرف؛ سلاح های سبک تر، کوچکتر، هوشمندتر، دوربردتر، ارزانتر و نامریی تر؛ شناسایی فوری کلیه خصوصیات ژنتیکی و اخلاقی و استعدادهای ابتلا به بیماری: ارسال دقیق دارو به آدرس های مورد نظر در بدن، تکنولوژی باتری و لاستیک هایی با مقاومت بسیار بالا و همچنین ساخت اتوبان های اتوماتیک و افزایش درآمدهای ملی از جمله فوایدی است که می توان نام برد.
مدارهای پیوسته میکروالکترونیکی می توانند به عنوان مغز متفکر باشند و سیستم های میکروالکترومکانیکی با اضافه کردن چشم و بازو، این قدرت تفکر را توسعه می دهد تا این میکروسیستمها بتوانند محیط اطرافشان را حس کرده و کنترل نمایند. این حسگرها در ساده ترین حالت با کمک اندازه گیری پدیده های مکانیکی، گرمایی، زیستی، شیمیایی، نوری و مغناطیسی، اطلاعات را از محیط جمع آوری می کنند. پس از اخذ اطلاعات از حس کننده ها، دستگاه های الکترومکانیکی به کمک قدرت تصمیم گیری خود، محرکها را به پاسخ هایی چون حرکت، جابجایی تنظیم کردن، پمپ کردن و فیلتر کردن وادار کرده، محیط را به سمت نتایج موردنظر هدایت می کنند.
سنسورها یک نمونه از کارکردهای فناوری میکرونانو می باشد. در این حوزه میکروشتاب سنج ها به طور وسیعی پرکاربرد هستند. میکروشتاب سنج دستگاهی است که مقدار شتاب وارده را اندازه گیری می کند. به طور مفهومی، یک میکروشتاب سنج مانند یک جسم میرا کننده روی یک فنر عمل می کند. در سال های گذشته شتاب سنج ها در ابعاد ماکرو و به صورت گسسته (مدل جرم و فنر) مدل سازی می شد اما در دهه های اخیر و با گسترش فناوری و دسترسی بشر به علوم و فنون جدید مدل دقیق و پیوسته در تحلیل ها مورد استفاده قرار می گیرد. میکروشتاب سنج ها از سه قسمت عمده جرم محک، تیرک ها (فنرها) و میرا کننده تشکیل می شود. هنگامی که نیرو بر سنسور وارد میشود جرم محک به اندازه ای جابجا می شود که نیروی وارد شده از فنر به جسم، جرم محک را با شتابی برابر شتاب بدنه میکروشتاب سنج حرکت دهد. سپس با اندازه گیری میزان جابجایی مقدار شتاب به دست می آید. اندازه گیری مقدار جابجایی جرم محک روش های گوناگونی دارد که با توجه به نوع میکروسنسور ممکن است به صورت اندازه گیری ظرفیت خازنها، جابجایی تیرک ها و … باشد.
میکروشتاب سنج:
میکروشتاب سنج دستگاهی است که مقدار شتاب صحیح را اندازه گیری می کند. شتاب صحیح شتاب نسبت به جسم در حال سقوط آزاد است. شتاب سنج دارای مدل های یک محوری و چند محوری است که می توانند اندازه و جهت شتاب را به عنوان یک کمیت برداری اندازه گیری کنند.
ساختار میکروشتاب سنج:
به طور مفهومی، یک میکروشتاب سنج مانند یک جسم میراکننده روی یک فنر عمل می کند. هنگامی که میکروشتاب سنج با شتابی حرکت می کند، جرم محک به اندازهای جابجا می شود که نیروی وارد شده از فنر، جسم را با شتابی برابر شتاب بدنه میکروشتاب سنج حرکت دهد. سپس با اندازه گیری میزان جابجایی مقدار شتاب به دست می آید. میکروشتاب سنج های جدید دارای تیر آزادی هستند که به یک جرم لرزه ای متصل است.
میرایی در اثر گازهای باقیمانده محبوس شده در داخل دستگاه ایجاد می شود. تا زمانی که فاکتور کیفیت خیلی کم نیست، میراکنندگی موجب حساسیت کم نمی شود. تحت اثر شتاب خارجی جرم لرزه ای متصل به تیر آزاد از مکان طبیعی خود منحرف می شود. این انحراف به صورت آنالوگ یا دیجیتال اندازه گیری می شود. ظرفیت خازن بين مجموعه ای از تیرهای ثابت و مجموعه ای از تیرهایی که به جرم های لرزه ای متصل اند اندازه گیری می شوند. این روش ساده، قابل اعتماد و ارزان است. گنجاندن مقاومت های پیزو در فنرها برای آشکارسازی تغییر شکل فنر و متعاقباً انحراف آنها جایگزین خوبی برای روش قبل می باشد. این روش تنها چند مرحله پردازش اضافه در فرایند ساخت نیاز دارد. برای حساسیت های بالا از تونل زنی کوانتومی نیز استفاده می شود. این روش نیاز به یک پردازش اختصاصی دارد که آن را بسیار گران می کند. اندازه گیری های نوری در محیط آزمایشگاهی نیز انجام می شوند. نوع غیر معمول دیگری از شتاب سنج ها بر مبنای تکنولوژی میکروسیستم شامل یک گرم کننده کوچک در پایین یک برآمدگی توخالی خیلی کوچک است. گرم کننده هوای داخل محفظه را گرم می کند و موجب بالا آمدن آن می شود. یک ترموکوپل بر روی محفظه مشخص می کند در کجا هوای گرم به محفظه می رسد و انحراف آن از مرکز برآمدگی محفظه اندازه گیریی از شتابی است که به سنسور اعمال شده است. بیشتر شتاب سنج های میکروالکترومکانیکی در صفحه کار می کنند، به این معنی که طوری طراحی شده اند که تنها به شتاب در راستای برش زیرلایه حساس هستند. به وسیله ترکیب کردن دو وسیله به صورت عمود بر یکدیگر بر روی یک زیرلایه می توان یک میکروشتاب سنج دو محوری ساخت که شتاب را در دو راستا اندازه گیری کند. به وسیله اضافه کردن یک وسیله میکروشتاب سنج دیگر خارج از صفحه می توان در سه راستا شتاب را اندازه گیری کرد. این ترکیب همواره خطای بسیار کمتری نسبت به حالتی دارد که افزاره ها را پس از ساخت جداگانه با هم ترکیب کنیم. میکروشتاب سنج های الکترومکانیکی برای اندازه گیری در محدوده های بسیار وسیعی، که به هزاران متر بر مجذور ثانیه هم می رسد، به کار می روند. طراح باید مصالحه ای بین حساسیت و حداکثر مقدار شتاب قابل اندازه گیری انجام دهد. سیلیسیم پرکاربردترین ماده در ساخت تراشه است. این ماده هم از نظر اقتصادی به صرفه است و هم ویژگی های بی همتایی دارد. تک بلور سیلیسیم یک ماده کاملا هوکی است، بدین معنا که تغییر شکل پسمانده نداشته و از این رو تلفات انرژی ندارد. همچنین این ویژگی باعث می شود تا مقاوت خستگی این ماده بسیار بالا باشد. مواد دیگری مانند پلیمرها و فلزها نیز کاربرد گسترده ای برای ساخت سیستم های میکروالکترومکانیکی دارند.
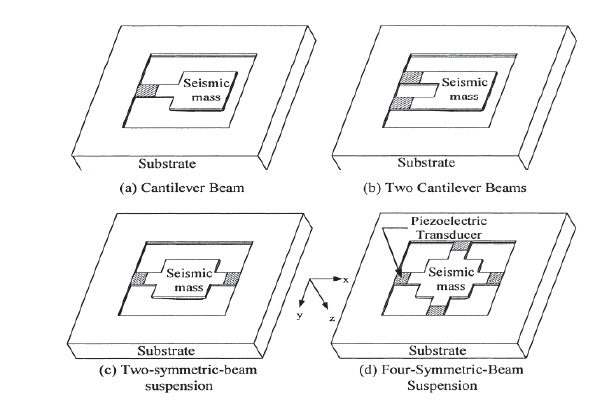
انواع میکروشتاب سنج ها
در سال های قبل شتاب سنج ها معمولا در ابعاد ماکرو طراحی و ساخته می شدند. این نوع شتاب سنج ها به گونه ای بودند که هزینه ساخت زیادی داشتند اما در سال های اخیر با توجه به پیشرفت های زیادی که در زمینه میکروسیستم ها صورت گرفته است مهندسان به ساخت سنسورها در ابعاد میکرو روی آورده اند. مزیت کار در ابعاد کوچک افزایش دقت به میزان چشمگیر و همچنین کاهش هزینه های تولید به میزان خیلی زیاد است. همین عوامل باعث شده است که کشورهای توسعه یافته، سرمایه گذاری در این زمینه را افزایش دهند به طوری که در ۱۰ سال گذشته بیشتر مقالات و پژوهش های ارائه شده در این زمینه بوده است. در این راستا در کشور ما نیز در سال های اخیر سرمایه گذاری در این بخش زیاد شده است.
اگر یک قدم پا فراتر گذاریم می بینیم که در حال حاضر کشورهای پیشرفته بیشتر سرمایه گذاری ها را در بخش ساختارهای میکرو و نانو انجام می دهند به طوری که بعضی از دانشمندان معتقدند در سال های نه چندان دور فناوری ساخت در ابعاد کوچک نقش تعیین کننده ای در توسعه هر کشوری خواهد داشت.
میکروشتاب سنج ها ممکن است یک جهته و یا چندجهته باشند به این معنی که می توانند طوری طراحی شوند که بتوانند فقط شتاب وارده در یک جهت را اندازه بگیرند یا چند جهته باشند و شتاب وارده در جهت های مختلف را بتوانند اندازه گیری کنند. میکروشتاب سنج ها در انواع مختلف خازنی، پیزورزیستیو، پیزوالکتریک، فلویدیک، حرارتی، اپتیکال و …هستند که میکروشتاب سنج های خازنی و پیزو رزیستیو بسیار پرکاربرد میباشند.
میکروشتاب سنج خازنی:
به طور کلی سه نوع شتاب سنج از نوع خازنی وجود دارد، ۱. شانه محوری ۲. شانه جانبی ۳. صفحه ای.
طرح کلی این سه نوع شتاب سنج به ترتیب در شکل های زیر نشان داده شده است.
شکل طرح کلی میکروشتاب سنج خازنی شانه محوری.
شکل طرح کلی میکروشتاب سنج خازنی شانه جانبی.
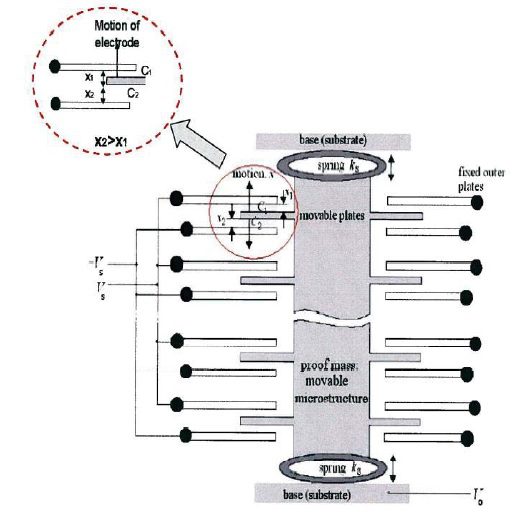
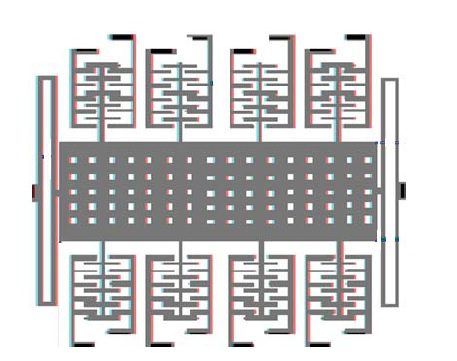
شکل میکروشتاب سنج خازنی صفحه ای.
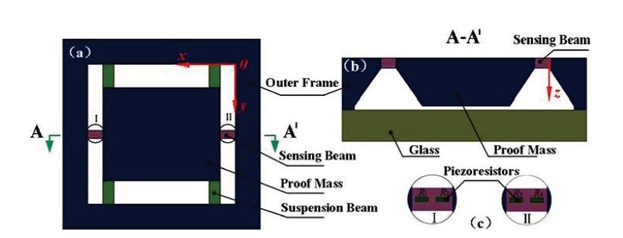
ساختار میکروشتاب سنج خازنی صفحه ای:
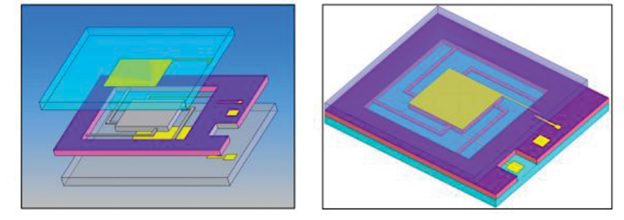
پیکربندی اصلی میکروشتاب سنج در شکل زیر نشان داده شده است. معمولا این نوع میکروسنسور از سه صفحه شامل دو صفحه شیشه و یک صفحه سیلیکون تشکیل می شود. صفحات شیشه برای صفحه های بالا و پایین استفاده می شود. صفحه مرکزی شامل جرم محک است که بر پایه شتاب وارده تغییر مکان داده و موجب تغییر ظرفیت در خازن های بالا و پایین می شود. میکروشتاب سنج براساس اختلاف در ظرفیت خازن های بالا و پایین شتاب وارده را محاسبه می کند. جرم محک توسط چهار تیر L شکل نگه داشته می شود. این نوع پیکربندی موجب کاهش سایز سنسور می شود همچنین غیر خطی بودن سیستم را کاهش می دهد. معمولا برای ساخت میکروشتاب سنج خازنی از فرآیند ساخت بولک استفاده می شود.
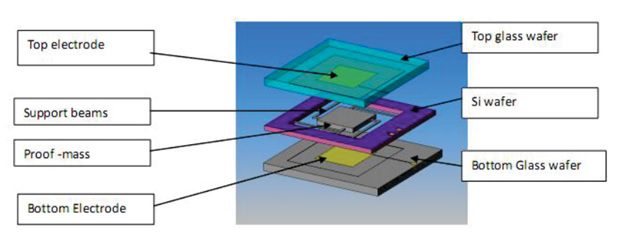
شکل پیکربندی اصلی میکروشتاب سنج خازنی صفحه ای.
اندازه و جرم محک و استحکام تیرها (فنرها باید به صورت کاملا دقیق مشخص باشد همچنین تمامی تحلیل ها در فشار یک اتمسفر و دمای محیط انجام می گیرد.
میکروشتاب سنج پیزو رزیستیو:
میکرو شتاب سنج پیزورزیستیو شامل جرم معلق است که توسط یک یا چند تیر نگه داشته شده است. پیزو در داخل تعدادی از این تیرها جای داده می شود. وقتی نیروی خارجی بر سنسور اعمال می شود پیزو تحت کرنش قرار می گیرد و به این ترتیب مقاومت آن تغییر می کند.
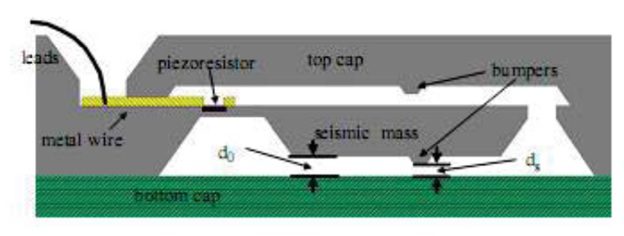
شکل نمای جانبی میکروشتاب سنج پیزورزیستیو.
میکروشتاب سنج پیزورزیستیو با ساختار صفحه ای
این نوع میکروشتاب سنج دارای فرکانس تشدید بالا است. طرح کلی میکروشتاب سنج پیزورزیستیو با ساختار صفحه ای در شکل زیر نشان داده شده است.
شکل میکروشتاب سنج پیزورزیستیو با ساختار صفحه ای.
میکروشتاب سنج پیزوالکتریک
یکی دیگر از روش های پرکاربرد در اندازه گیری شتاب استفاده از مواد پیزوالکتریک در ساختار میکروشتاب سنج است. مزیت استفاده از این میکروشتاب سنجها پهنای باند بالای آنها است اما در مقابل شتاب های استاتیک و فرکانس پایین بازده بسیار کمی دارد.
شکل نمای جانبی و نمای بالا میکروشتاب سنج پیزوالکتریک.
شرح پروژه:
در این پروژه شتاب سنج خازنی میکروماشین کاری شده سطحی با تکنولوژی MEMS در نرم افزار کامسول شبیه سازی شده است.
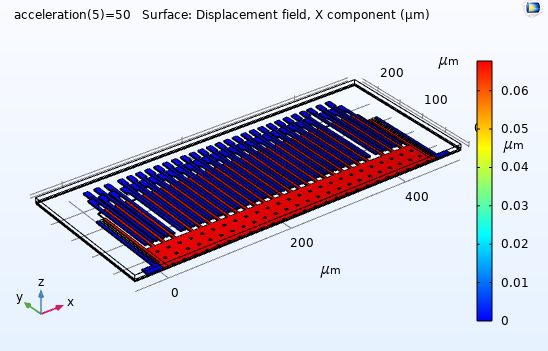
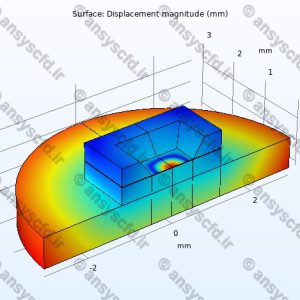
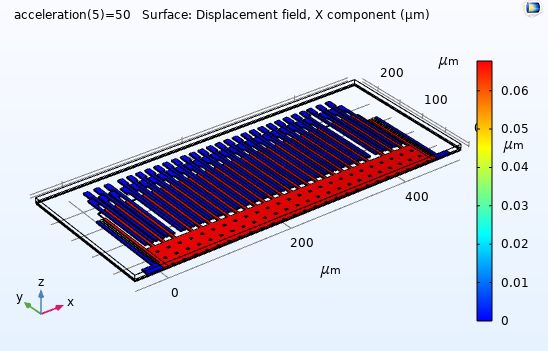
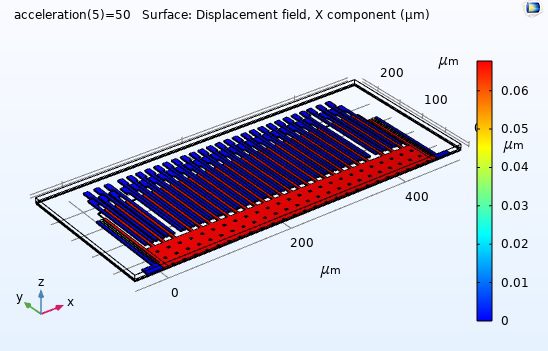
شکل جابجایی دامین های پلی سیلیکون هنگام اعمال شتاب g50. جرم معلق در حدود0.7 میکرومتر جابجا می شود. الکترودهای ثابت و فنر جابجایی ناچیزی دارند. فنرها در امتداد طول خود جابجایی متغیری دارند.
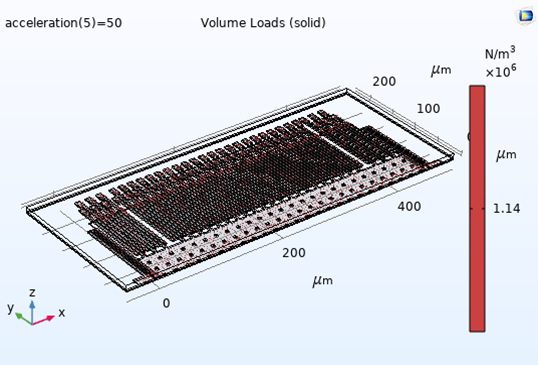
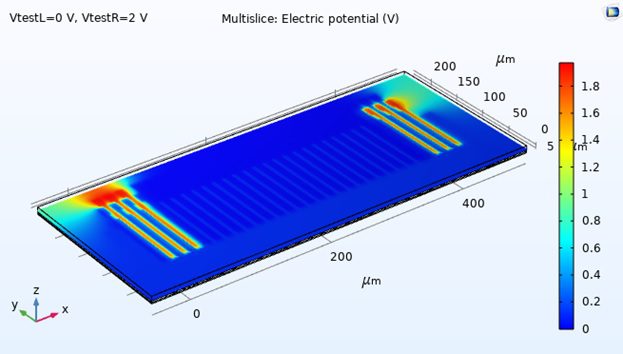
شکل پتانسیل الکتریکی هنگام اعمال شتاب g50.
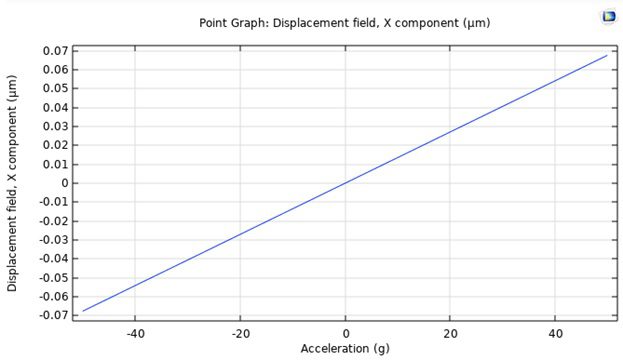
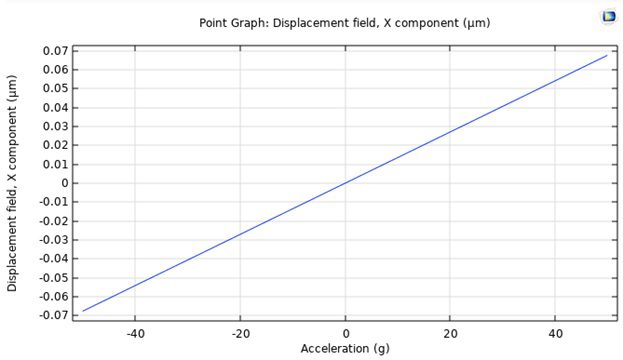
شکل جابجایی در مقابل شتاب.
شکل فوق رابطه خطی بین جابجایی و شتاب اعمال شده را نشان می دهد.
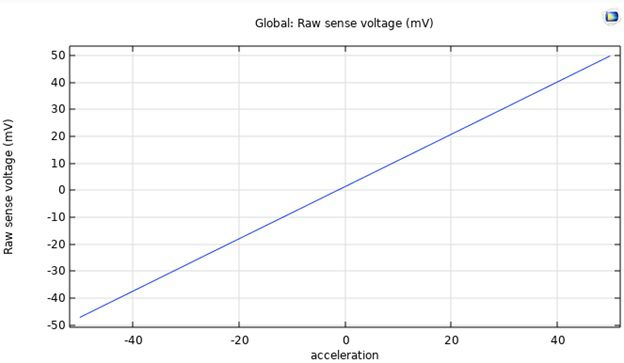
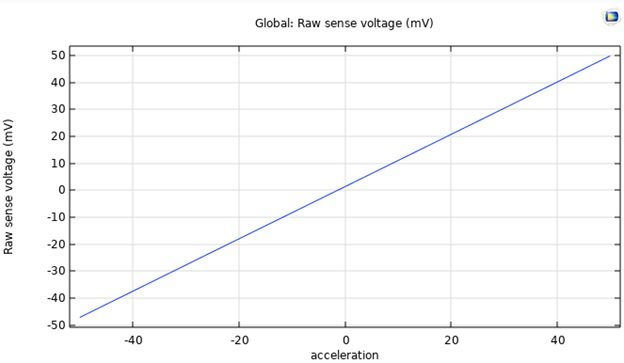
شکل ولتاژ حس شده در مقابل شتاب اعمال شده.
شکل فوق رابطه خطی بین ولتاژ حس شده و شتاب را نشان می دهد.
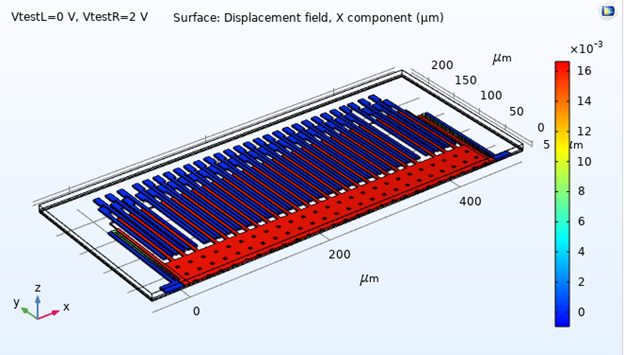
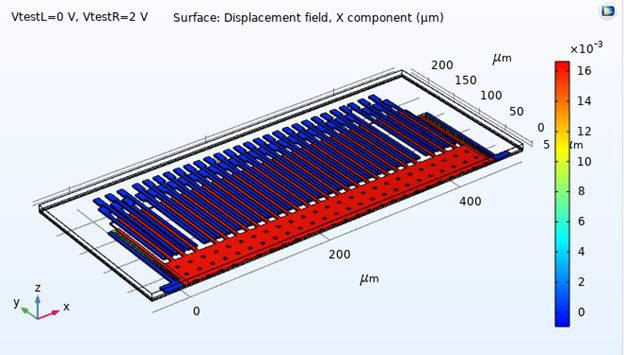
شکل جابجایی دامنه های پلی سیلیکون هنگام ولتاژ اعمال شده صفر ولت برای الکترودهای ثابت در طرف چپ الکترودهای متحرک متصل به جرم معلق و ولتاژ 2 ولت برای الکترودهای سمت راست. جابجایی جرم معلق در حدود 0.02 میکرومتر است.
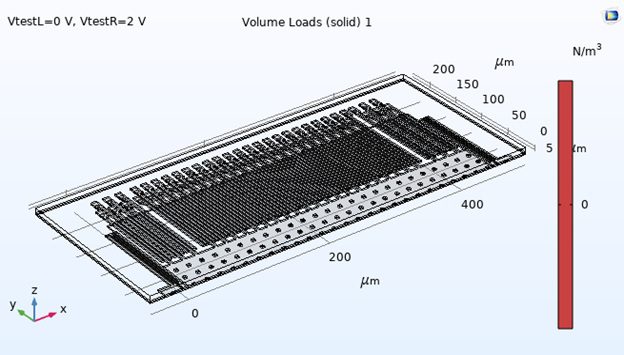
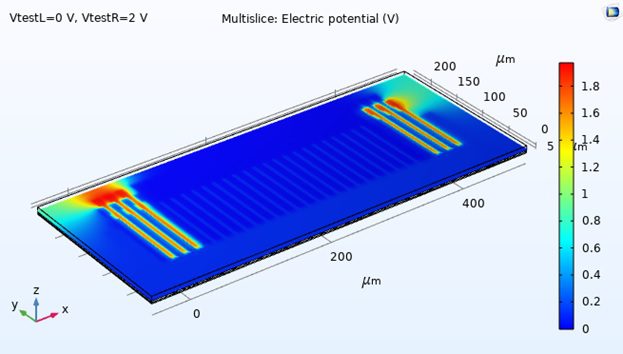
شکل پتانسیل الکتریکی در هنگام اعمال ولتاژ 0 و 2 ولت.
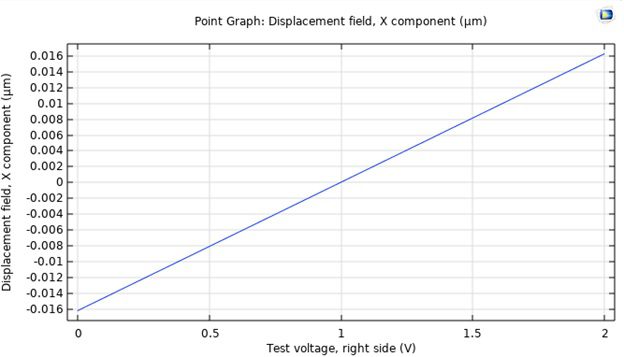
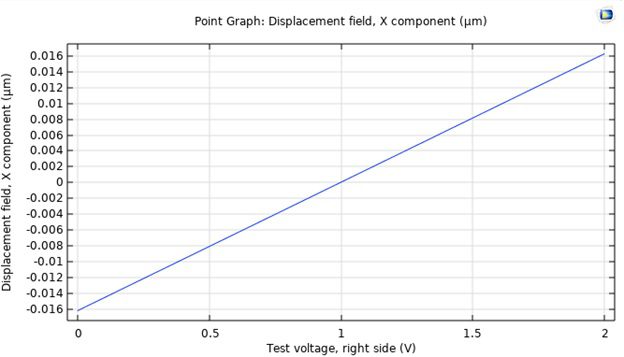
شکل جابجایی در مقابل ولتاژ اعمال شده.
شکل فوق جابجایی بدست آمده از اعمال ولتاژ برای هرطرف الکترودهای ثابت را نشان می دهد. مقادیر جابجایی اندازه یکسانی با علامت های مخالف دارند که از حالت تقارن انتظار می رود.